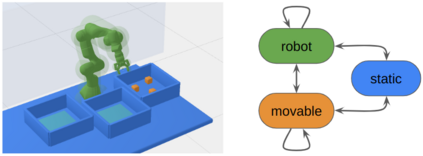
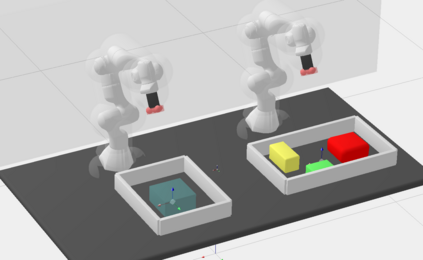
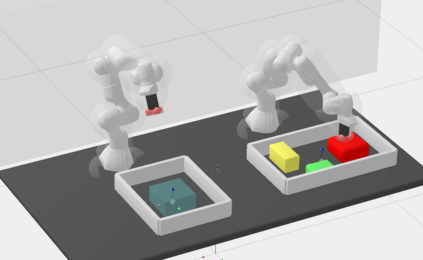
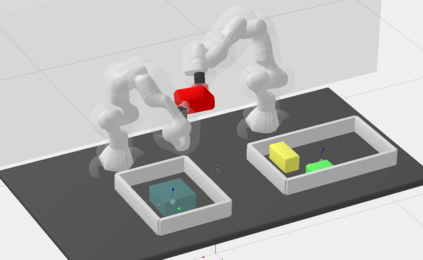
The path planning problems arising in manipulation planning and in task and motion planning settings are typically repetitive: the same manipulator moves in a space that only changes slightly. Despite this potential for reuse of information, few planners fully exploit the available information. To better enable this reuse, we decompose the collision checking into reusable, and non-reusable parts. We then treat the sequences of path planning problems in manipulation planning as a multiquery path planning problem. This allows the usage of planners that actively minimize planning effort over multiple queries, and by doing so, actively reuse previous knowledge. We implement this approach in EIRM* and effort ordered LazyPRM*, and benchmark it on multiple simulated robotic examples. Further, we show that the approach of decomposing collision checks additionally enables the reuse of the gained knowledge over multiple different instances of the same problem, i.e., in a multiquery manipulation planning scenario. The planners using the decomposed collision checking outperform the other planners in initial solution time by up to a factor of two while providing a similar solution quality.
翻译:操作规划以及任务和运动规划设置中出现的道路规划问题通常重复:同一个操控者在空间中的移动通常只会稍有变化。尽管有再次利用信息的潜力,但很少有规划者充分利用现有信息。为了更好地进行再利用,我们将碰撞检查分解为可重复使用的部分和不可重复使用的部分。然后我们将操纵规划中的道路规划问题的顺序作为一个多细路规划问题处理。这样,就可以使用在多个查询中积极最大限度地减少规划努力的规划工作的规划人员,从而积极再利用先前的知识。我们在EIRM* 中采用了这种方法,并下令使用LazyPRM*, 并用多个模拟机器人示例作为基准。此外,我们表明将碰撞检查分解的方法能够使所学到的知识在相同问题的多种不同情况下(即多孔操纵规划假想中)得到再利用。使用分解的碰撞检查的规划人员在初步解决时间将其他规划人员排出,最多有两个系数,同时提供相似的解决方案质量。</s>