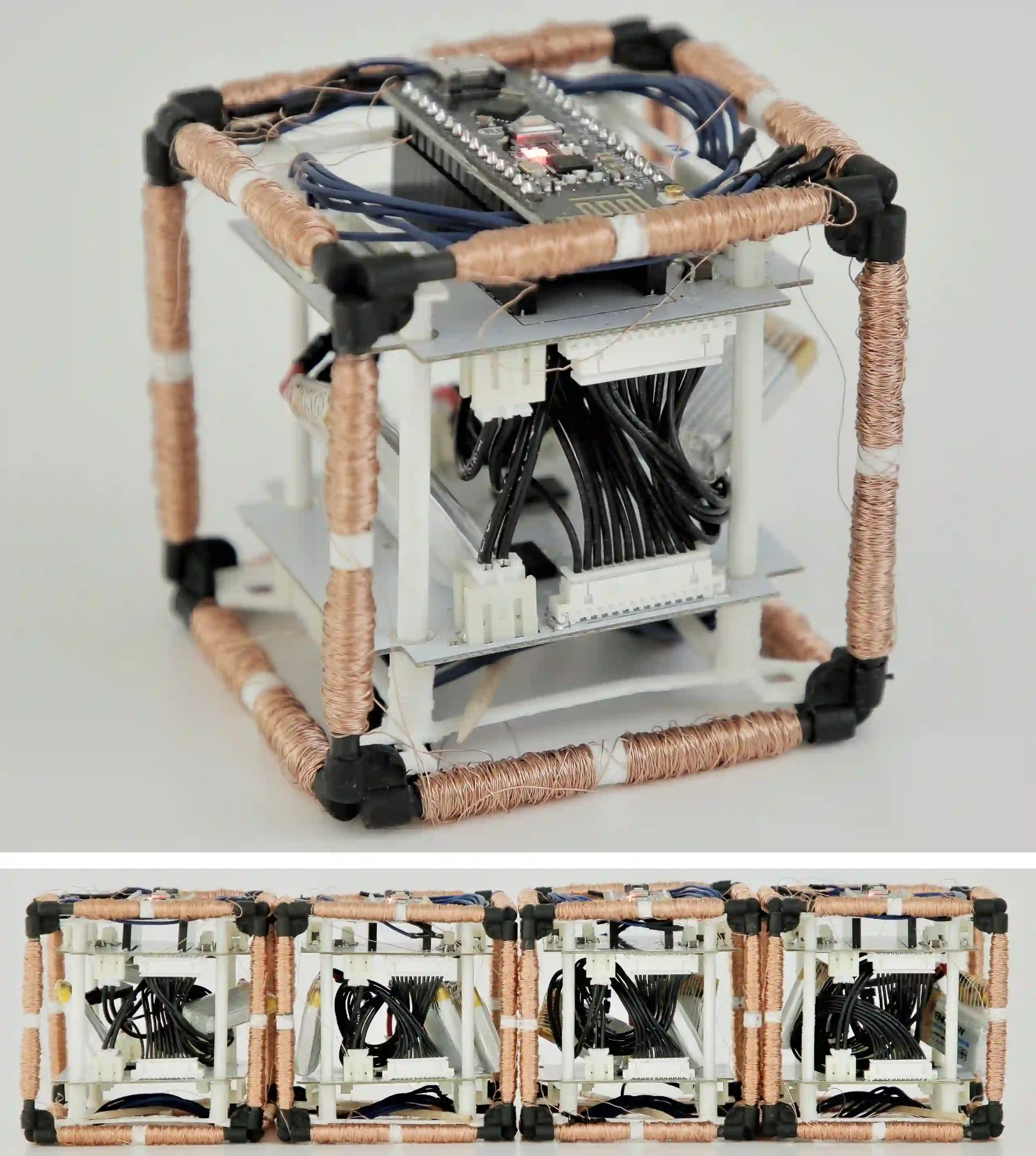
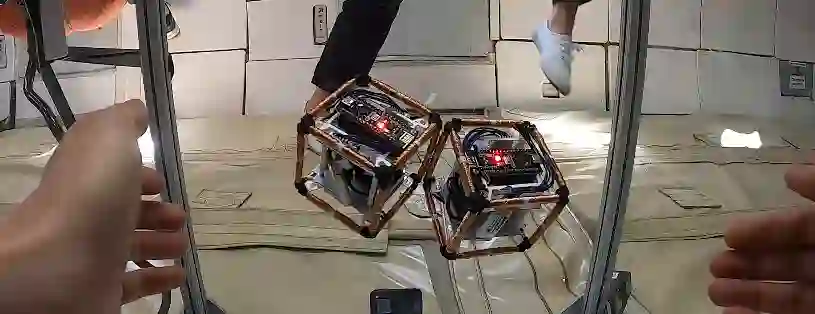
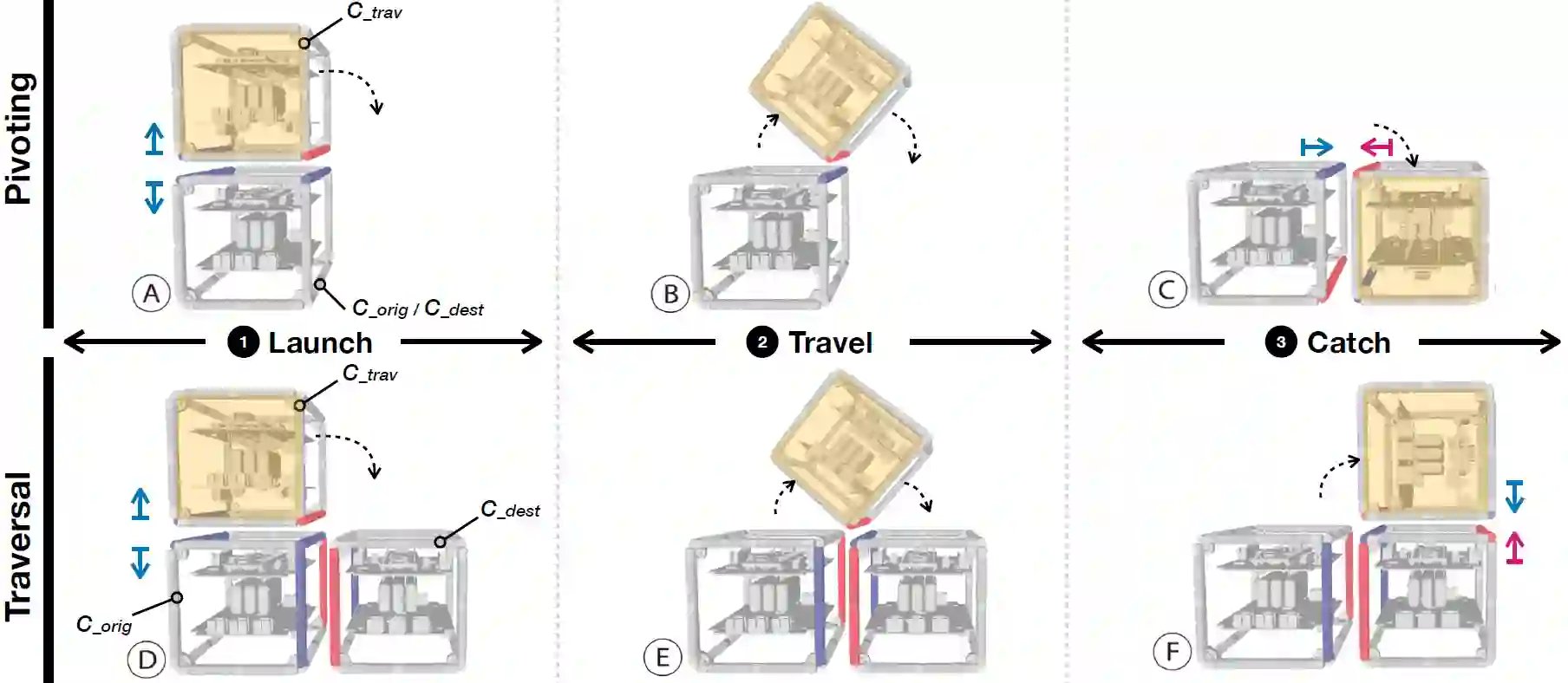
This paper introduces a cube-based reconfigurable robot that utilizes an electromagnet-based actuation framework to reconfigure in three dimensions via pivoting. While a variety of actuation mechanisms for self-reconfigurable robots have been explored, they often suffer from cost, complexity, assembly and sizing requirements that prevent scaled production of such robots. To address this challenge, we use an actuation mechanism based on electromagnets embedded into the edges of each cube to interchangeably create identically or oppositely polarized electromagnet pairs, resulting in repulsive or attractive forces, respectively. By leveraging attraction for hinge formation, and repulsion to drive pivoting maneuvers, we can reconfigure the robot by voxelizing it and actuating its constituent modules - termed Electrovoxels - via electromagnetically actuated pivoting. To demonstrate this, we develop fully untethered, three-dimensional self-reconfigurable robots and demonstrate 2D and 3D self-reconfiguration using pivot and traversal maneuvers on an air-table and in microgravity on a parabolic flight. This paper describes the hardware design of our robots, its pivoting framework, our reconfiguration planning software, and an evaluation of the dynamical and electrical characteristics of our system to inform the design of scalable self-reconfigurable robots.
翻译:本文引入了一个基于立方体的可重新配置机器人, 该机器人使用以电磁磁基为基础的电磁振动框架, 来通过电磁振动活化来重新配置三个维度。 为了应对这一挑战, 我们使用一个基于嵌入每个立方体边缘的电子磁网的振动机制, 以可互换的方式创建相同或相反的极化电磁磁网对子, 从而分别产生反向或有吸引力的力量。 通过利用对链形的吸引力, 并用挤压来驱动自再配置机器人的动作, 我们可以通过对机器人进行蒸发, 并通过电磁振动活化活化来激活其构成模块( 电磁振动模型) 。 为了证明这一点, 我们开发了一个基于电磁磁共振、 三维自我配置的机器人, 并展示了 2D 和 3D 自我再配置, 分别导致反向或有吸引力的力量。 通过对链构成的吸引力, 和反向驱动驱动调节, 我们可以通过对机器人进行调节, 使机器人进行重新配置, 通过对机器人进行维变动的机器人结构设计, 设计一个可变动的系统设计, 和微变形机器人结构, 系统, 设计, 设计一个可变形的硬变形的系统,,, 设计一个可变形的系统,, 设计一个可变形的机器人结构, 结构, 结构,,, 来描述我们造型的系统, 设计,,,, 设计一个可变形的系统, 设计一个可变形的系统,, 结构, 结构,,,,,,,, 设计一个可变式的, 结构, 设计一个可变式的, 的,, 结构,, 结构的, 的,, 的,, 结构,, 的, 的, 的,, 的, 结构的,,,,, 结构的,, 的, 的, 的, 的, 的,,, 的,, 的, 的, 的,,,,,,,,,,,,