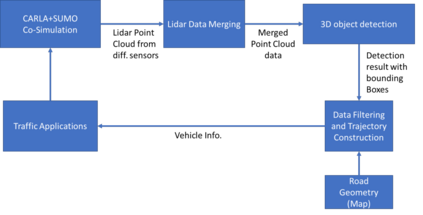
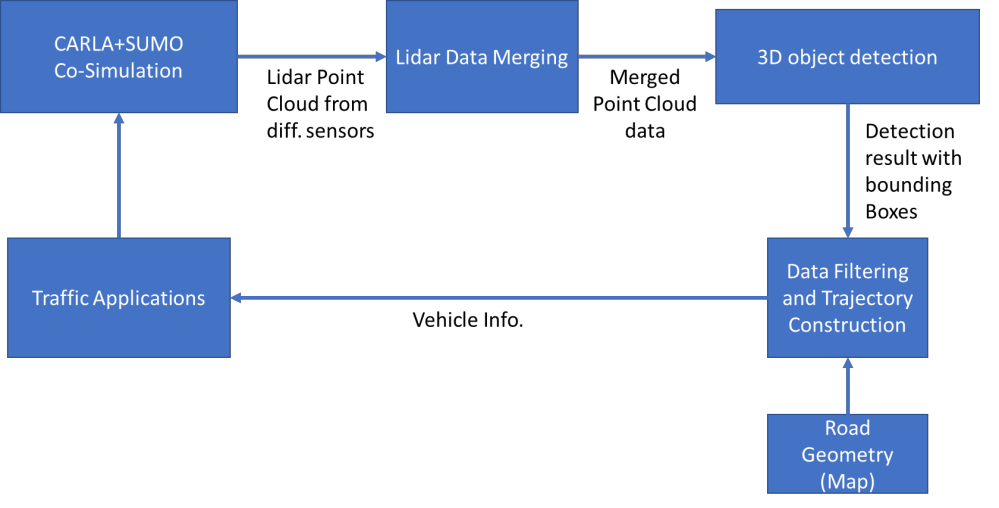
Existing data collection methods for traffic operations and control usually rely on infrastructure-based loop detectors or probe vehicle trajectories. Connected and automated vehicles (CAVs) not only can report data about themselves but also can provide the status of all detected surrounding vehicles. Integration of perception data from multiple CAVs as well as infrastructure sensors (e.g., LiDAR) can provide richer information even under a very low penetration rate. This paper aims to develop a cooperative data collection system, which integrates Lidar point cloud data from both infrastructure and CAVs to create a cooperative perception environment for various transportation applications. The state-of-the-art 3D detection models are applied to detect vehicles in the merged point cloud. We test the proposed cooperative perception environment with the max pressure adaptive signal control model in a co-simulation platform with CARLA and SUMO. Results show that very low penetration rates of CAV plus an infrastructure sensor are sufficient to achieve comparable performance with 30% or higher penetration rates of connected vehicles (CV). We also show the equivalent CV penetration rate (E-CVPR) under different CAV penetration rates to demonstrate the data collection efficiency of the cooperative perception environment.
翻译:现有的交通操作和控制数据收集方法通常依靠基于基础设施的环路探测器或车辆轨迹探测器。连接和自动化车辆不仅能够报告关于自身的数据,而且能够提供所有被探测到的周围车辆的状况。将多架天文飞行器和基础设施传感器(如利达雷达)的感知数据整合在一起,即使在非常低的渗透率下也能提供更丰富的信息。本文件旨在开发一个合作数据收集系统,将基础设施和天文飞行器的利达尔点云数据结合起来,为各种运输应用创造一个合作的感知环境。先进的三维探测模型用于在合并点云中探测车辆。我们用与CARLA和SUMO共同模拟平台的最大压力适应信号控制模型测试拟议的合作感知环境。结果显示,CAV+基础设施传感器的非常低的渗透率足以达到相当的性能,使连接车辆达到30%或更高的渗透率。我们还展示了在不同的CAV渗透率下相同的CV渗透率(E-CVPR),以显示合作感官环境的数据收集效率。