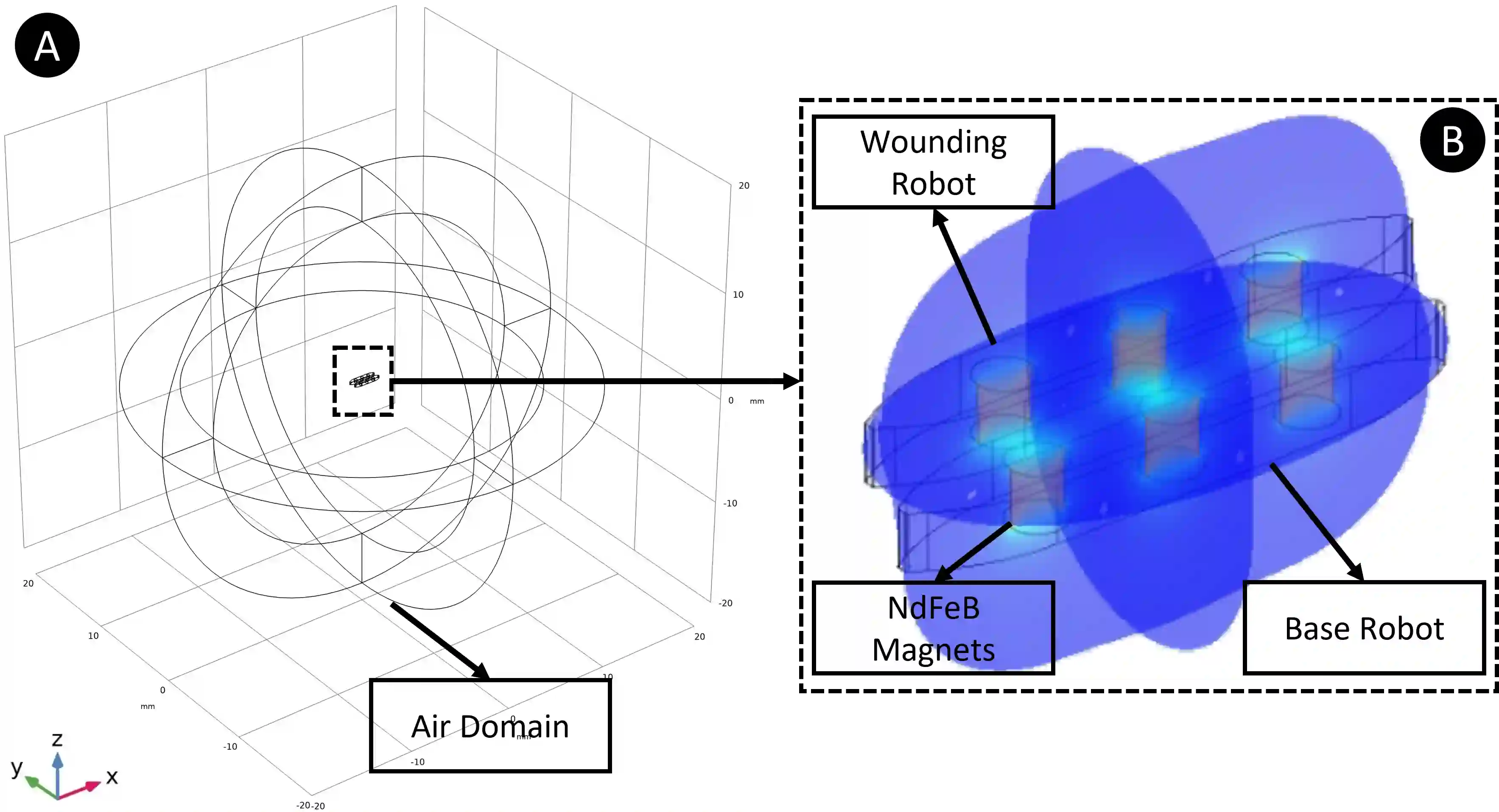
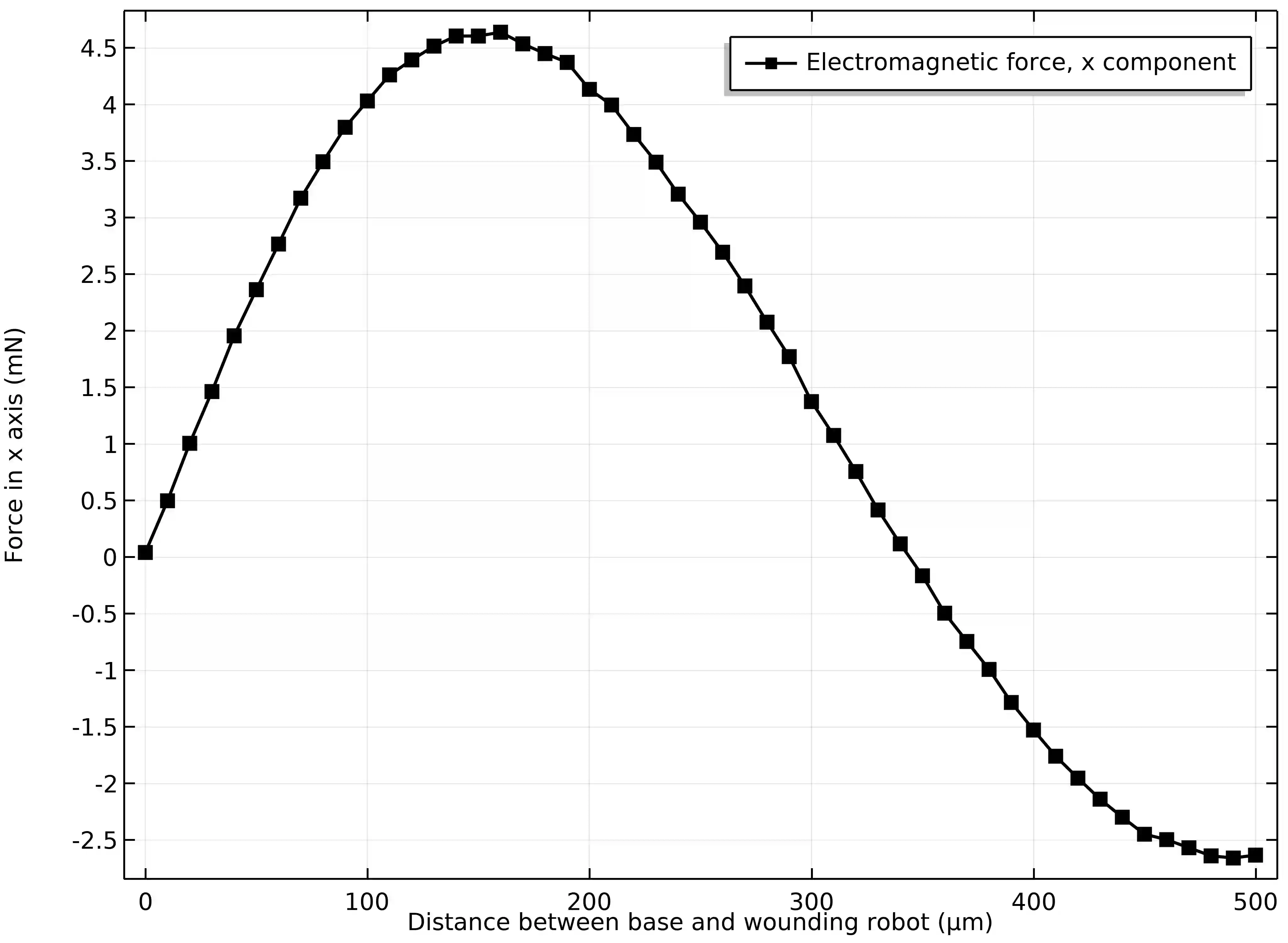
The purpose of this study is to find ideal forces for reducing cell stress in wound healing process by micro robots. Because of this aim, we made two simulations on COMSOL Multiphysics with micro robot to find correct force. As a result of these simulation, we created force curves to obtain the minimum force and friction force that could lift the cells from the surface will be determined. As the potential of the system for two micro robots that have 2 mm x 0.25 mm x 0.4 mm dimension SU-8 body with 3 NdFeB that have 0.25 thickness and diameter, simulation results at maximum force in the x-axis calculated with 4.640 mN, the distance between the two robots is 150 um.
翻译:这项研究的目的是寻找理想的力量,通过微型机器人减少伤口愈合过程中的细胞压力。 由于这个目的,我们用微型机器人对COMSOL多物理学进行了两次模拟,以找到正确的力量。通过这些模拟,我们创建了力量曲线,以获得最小的力量和摩擦力,从表面提升细胞。将确定两个具有2毫米x0.25毫米x0.4毫米SU-8尺寸、3 NdFeB厚度和直径为0.25 NdFeB的微型机器人的系统潜力,在以4.640米N计算的X轴中,模拟结果为最大力,两个机器人之间的距离为150微米。