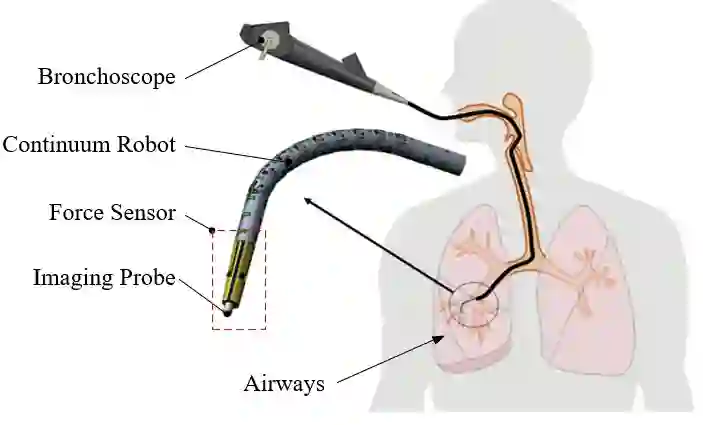
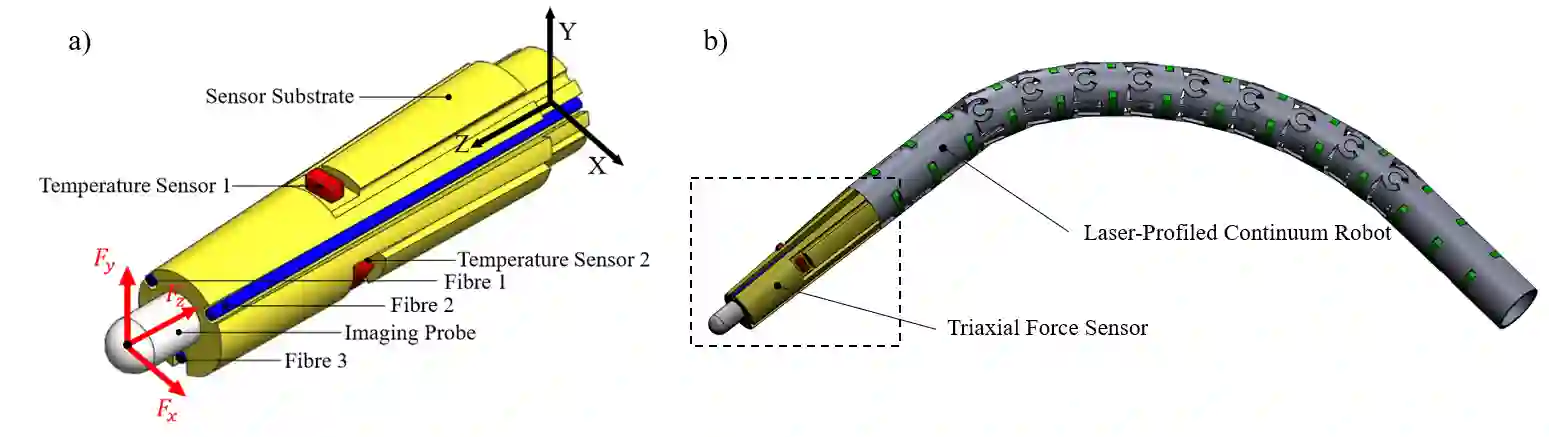
Accurate force sensing is important for endoluminal intervention in terms of both safety and lesion targeting. This paper develops an FBG-based force sensor for robotic bronchoscopy by configuring three FBG sensors at the lateral side of a conical substrate. It allows a large and eccentric inner lumen for the interventional instrument, enabling a flexible imaging probe inside to perform optical biopsy. The force sensor is embodied with a laser-profiled continuum robot and thermo drift is fully compensated by three temperature sensors integrated on the circumference surface of the sensor substrate. Different decoupling approaches are investigated, and nonlinear decoupling is adopted based on the cross-validation SVM and a Gaussian kernel function, achieving an accuracy of 10.58 mN, 14.57 mN and 26.32 mN along X, Y and Z axis, respectively. The tissue test is also investigated to further demonstrate the feasibility of the developed triaxial force sensor
翻译:精密力感应对于内光干预在安全和损伤目标方面都很重要。本文通过在锥形基底的横向侧方配置三个FBG传感器,开发一个基于FBG的机器人支气管检查动力感应器。它允许用于干预仪器的大型和以偏心心心内润滑,使内部有一个灵活的成像探测器能够进行光学生物检查。力感应器由激光显示的连续连续连续机器人组成,热漂移由传感器基质环绕表面的三个温度感应器充分补偿。对不同的脱钩方法进行了调查,并根据SVM和高斯内核的交叉校准功能采用了非线性脱钩功能,分别实现了X、Y和Z轴10.58米N、14.57米N和26.32米N的精确度。还调查了组织测试,以进一步证明已开发的三轴力传感器的可行性。