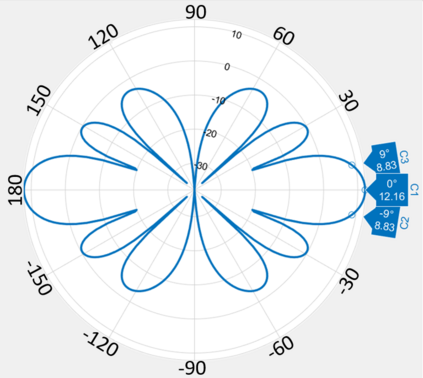
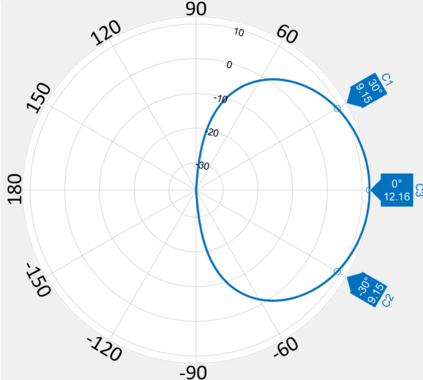
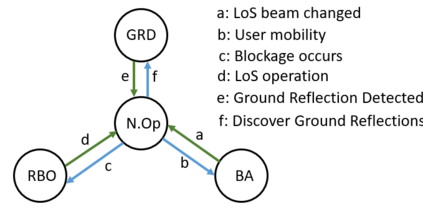
mm-Wave communication employs directional beams to overcome high path loss. High data rate communication is typically along line-of-sight (LoS). In outdoor environments, such communication is susceptible to temporary blockage by pedestrians interposed between the transmitter and receiver. It results in outages in which the user is lost, and has to be reacquired as a new user, severely disrupting interactive and high throughput applications. It has been presumed that the solution is to have a densely deployed set of base stations that will allow the mobile to perform a handover to a different non-blocked base station every time a current base station is blocked. This is however a very costly solution for outdoor environments. Through extensive experiments we show that it is possible to exploit a strong ground reflection with a received signal strength (RSS) about 4dB less than the LoS path in outdoor built environments with concrete or gravel surfaces, for beams that are narrow in azimuth but wide in zenith. While such reflected paths cannot support the high data rates of LoS paths, they can support control channel communication, and, importantly, sustain time synchronization between the mobile and the base station. This allows a mobile to quickly recover to the LoS path upon the cessation of the temporary blockage, which typically lasts a few hundred milliseconds. We present a simple in-band protocol that quickly discovers ground reflected radiation and uses it to recover the LoS link when the temporary blockage disappears.
翻译:偏向通信使用方向光束来克服高路径损失。 高数据率通信通常沿视线( LOS) 进行。 在室外环境中, 这种通信很容易受到发射机和接收机之间穿插行者的暂时阻塞。 它导致用户丢失, 并且必须重新获得新用户的断电, 严重干扰互动和高传输应用。 据认为, 解决方案是建立一组密集部署的基础站, 使移动能够在目前基站被阻断时向不同的无阻基站进行交接。 然而, 这对于室外环境来说是一个非常昂贵的解决方案。 通过广泛的实验, 我们表明, 在有混凝土或砾石表面的户外建筑环境中, 能够利用比LOS小约4dB路的地面反射器进行强的地面反射。 这样的解决方案是, 在平方平面但反映宽度时, 这样的反射路径无法支持高数据速度 。 它们可以支持控制频道通信, 并且, 更重要的是, 这对室外环境来说是一个非常昂贵的解决方案。 通过广泛的实验, 我们证明, 能够利用一个稳定的移动和底站之间最短时间同步的轨道, 。