

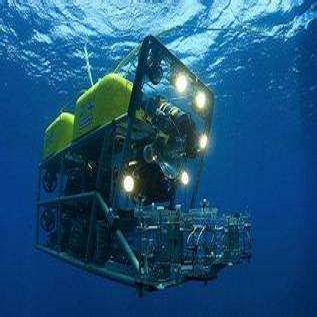
水下机器人
·
项目名称: 基于环境能源的水下机器人多尺度性能驱动设计方法和动态自适应网络构建技术
项目编号: No.50835006
项目类型: 重点项目
立项/批准年度: 2009
项目学科: 金属学与金属工艺
项目作者: 王树新
作者单位: 天津大学
项目金额: 150万元
中文摘要: 水下机器人对于海洋资源勘探、海洋环境监测和探测具有重要作用。本项目突破传统的水下机器人设计方法和理论,以从机群整体到单机多尺度的性能驱动为主线,综合运用现代设计方法,进行水下机器人的单机设计。并对设计完成的机器人机群进行自适应动态编队网络研究,以满足系统整体的任务目标性能要求。主要研究内容包括:(1)复杂任务目标描述与性能衡量指标获取;(2) 多尺度性能驱动设计方法研究;(3)海洋环境能源俘获机理和技术研究;(4) 基于海洋环境的水下机器人动态自适应网络研究。
中文关键词: 水下机器人;3M设计框架;多尺度性能驱动;多域场耦合;多体网络编队
英文摘要:
英文关键词: Underwater robot;3M design framework;Multiscale performance driven;Multi-field coupling;Multi-body formation
成为VIP会员查看完整内容
相关内容
相关主题
相关VIP内容
相关资讯
相关论文