中汽创智智能驾驶首席技术官张振林:高阶智能驾驶量产之路|量子位·视点分享回顾
视点 发自 凹非寺
量子位 | 公众号 QbitAI
2022年,自动驾驶领域依旧无比热闹。
随着智能化普及,后疫情时代的到来,车企纷纷提前抢占未来产业制高点,加大对自动驾驶技术研发和投资。与此同时,激光雷达与大算力芯片的技术不断成熟且成本不断下降,正越发促进高阶智能驾驶的量产加速。
在高阶智能驾驶量产之际,智能驾驶公司从算法、算力、数据上的积累,以及技术和成本维度考虑,在前进的道路上走向了不同的赛道,L2升维与L4降维之战也逐渐呈现,不管是升维还是降维,量产之路依旧布满荆棘。
智能驾驶公司需从需求与痛点深挖,以技术为核心、流程为保障、数据为驱动,多平台拓展,才能在量产之路上走的更顺更远。
那么,高阶智能驾驶的量产有什么特点?量产路线如何选择?落地进程又到了哪一阶段?
围绕高阶智能驾驶量产的路线、痛点、落地等,中汽创智智能驾驶首席技术官张振林在「量子位·视点」直播中分享了他的从业经验和观点。
以下根据分享内容进行整理:
感知路线及升维降维路线之争的理解
根据国际认可度相对较高的SAE美国汽车工程学会对自动驾驶进行的L0到L5分级,“高阶智能驾驶”主要是指L3及以上级别。
L3及以上和L2最主要的区别在于驾驶的主体:L3的驾驶主体是系统而非人类,在个别情况下可能需要人类接管;而L2驾驶主体还是人类,系统仅作为辅助。
谈到高阶自动驾驶的量产,我们先探讨下现在的L3,大家都是怎么做的?
自动驾驶的发展离不开整个产业链的发展和成熟,其中有两个最核心的点:一是感知,二是计算。
从感知侧来看,800万像素相机以及车载激光雷达已快速发展并进入前装量产时代,4D成像雷达也为自动驾驶提供了一些新的选择。5年前,一款Velodyne 64线激光雷达价格是几万美金,但今天,一些车规量产的激光雷达成本都已控制在万元以下。
从算力侧看,几年前的自动驾驶更多采用的是X86 CPU+GPU的架构,通过CPU+GPU的算力来为算法提供硬件上的支撑。但今天,大算力的车规SOC已纷纷上车,500Tops到1000Tops已不再遥不可及。除国际巨头外,我们可以欣喜地看到许多中国自主研发的大算力平台也已进入上车搭载阶段,比如华为的MDC系列,地平线的征程系列,黑芝麻的A1000等。
可以说,整个自动驾驶产业链已经非常接近大规模量产的状态,但在实现量产的具体方式上,自动驾驶的发展路线也呈现出多样化的特征。
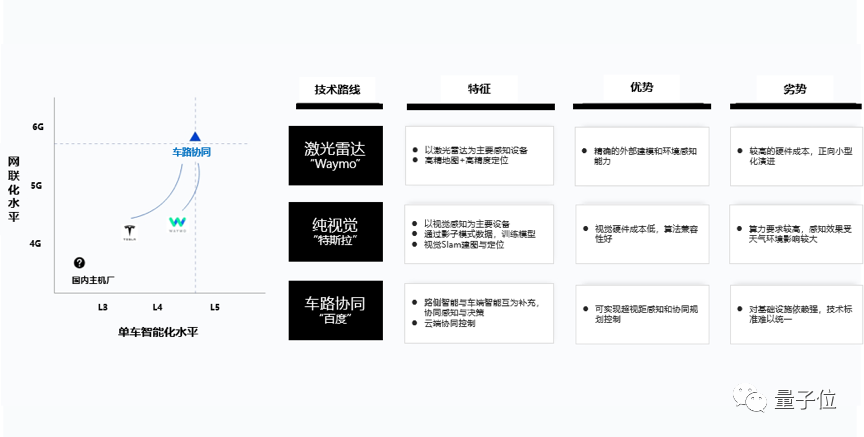
谷歌旗下的自动驾驶公司Waymo采取以激光雷达为主的发展路线,特斯拉采用其代表性的纯视觉自动驾驶方案,以百度为代表的一些国内公司试图推进以路侧智能与车端智能互为补充的车路协同技术路线。我们认为无论是激光派还是视觉派,无论是单车智能还是车路协同,从技术本身而言,它们没有矛盾也不冲突。
对于智能驾驶,尤其是高阶自动驾驶来说,“安全第一,成本可控”是量产落地的最核心目标。结合自动驾驶在算法、算力、数据上的积累,从技术和成本的维度综合考虑,中汽创智提出以视觉感知为主、其他传感器为辅的高阶自动驾驶前装量产方案,同时兼顾中国特色协同式自动驾驶的落地应用,逐步实现安全、高效和平稳的出行方式。
我们结合网上公开的渠道信息分析中国自动驾驶量产方面做得比较不错的智能驾驶公司及主机厂,可以看到,这些量产车型中搭载的摄像头数目前最高已达到12个,毫米波雷达最多达6个,激光雷达最多达3~4个。采用的算力平台覆盖英伟达的Xavier、Orin系列、Mobileye、华为mdc810等。在软件功能上,这些车型已具备L2甚至L2+应用场景实现能力,功能包括ADAS、城市及高速NOP等行车功能,并且搭载了从APA、HPP到RPA甚至AVP的泊车功能。
但目前主流车企的新车型大部分采用超前硬件预埋和软件迭代的量产方式,也就是说,车辆已经具备L2的软件功能和成熟的L3的硬件。万事具备,只待OTA,但是谁来提供一整套的解决方案和核心的算法?
其实,业内也呈现出“升维”和“降维”两种不同的声音。其中,传统ADAS或者说L2级供应商正采取的是升维的策略,而最近一些L4级供应商更多采用了降维策略。供应商之所以采取不同的路线,是因为其自身的优势差异。ADAS供应商的优势在于工程化能力,而L4供应商优势更多在于算法能力。但实现量产其实要求我们既要有高阶的算法能力,也要具备强大的工程能力,更重要的是具有大数据积累能力。
所以,不同的企业结合自身优势和发展路径会采取不同的实现方式,但目前还没有一家公司完成真正L3级别自动驾驶的方案量产。
高阶智能驾驶量产痛点解析
在这里,我想套用苹果CEO库克的一句话:“自动驾驶是所有人工智能项目之母,它同时也是所有人工智能项目当中最难的一个。”
我最早看到这句话是在2017年左右,我相信当时听闻库克这句话的时候,苹果应该已经开展了相应的自动驾驶相关业务。但到几年后的今天,苹果的自动驾驶汽车还是迟迟没有露出真容,这背后的原因到底是什么?
结合自身经验与行业分析,要实现自动驾驶真正的量产落地,我们认为要面对6大挑战。

第一块挑战更多是从人工智能项目本身来看,包括了数据、算力和核心算法层面。其中的每一项都需要丰富的资源、优秀的人才进行持续投入和钻研提升。
除了技术和算法问题本身,要真正达到量产性的落地,工程化能力、成熟的政策法规以及成本和市场接受度都是自动驾驶是否能够实现量产的核心挑战。
高阶智能驾驶量产落地思路
针对高阶智能驾驶量产落地,中汽创智结合自身定位、业务以及过往的量产经验,总结出一些思路。
首先,注重开创未来汽车产业合作新格局。中汽创智团队不仅聚集了主机厂、零部件供应商,同时还拥有大量从头部自动驾驶公司、科技公司、互联网公司来的优秀人才。我们群策群力、头脑风暴,确立了公司定位和智能驾驶业务规划。在此,我来分享下中汽创智团队如何看待未来的汽车行业格局。无论自动驾驶玩家多少,大家始终承认主机厂仍是其中最重要的玩家之一,而传统的Tier 1跟主机厂的合作模式在这个软件定义汽车的新时代发生了一些变革。因此,中汽创智结合自身优势提出“Tier 0.5”的新角色,希望创造一种主机厂-供应商和供应商-供应商之间的新型合作关系,并结合“产学研用”和国家战略打造创新型企业。
此外,确保实现系统全栈自研。依托中国一汽、东风、长安三大主机厂,并结合三家主机厂的平台优势,我们深度挖掘股东方们的共性与前瞻性需求。从自研的工具链、车规级协议适配、RTOS适配、核心模块的算法交付,以及前装高阶AD控制器研发,中汽创智已摆脱对传统Tier 1的依赖。中汽创智智能驾驶业务是基于全栈的系统自研能力,面向行业客户提供多维度的智能驾驶量产解决方案以及技术服务,从域控制器到系统设计、工具链到场景数据、核心自研算法及软件,中汽创智提供一种完全解耦的、完全开放的、完全适配的Tier 0.5供应商模式。这就是我们的业务逻辑,也是我们在后续量产过程中最强有力的保证。
算法、数据、工程化上的思考与实践
要实现前装量产以及量产中不同的车型搭载必然会受到产品的定位、成本以及价格的约束,需要考虑到车型的传感器选型、数量、域控制器的算力大小和功能个性化等各种因素。
面对此类复杂场景,中汽创智开发了一套统一的算法框架——可按照原子化组件化的开发模式,满足多场景可复用的特点。从底层的跨硬件平台、跨操作系统、跨原子化组件、到算法及工程组件,再到上层的应用软件,这一框架兼容多个硬件平台,可实现动态编排,提高部署效率。把算法模块化部署到设备端进行工作流的编排、算法布置、文件解析,通过中间件接口的抽象和信息接口的统一,可自动生成所面临的硬件平台和功能场景以及所需要的软件系统。
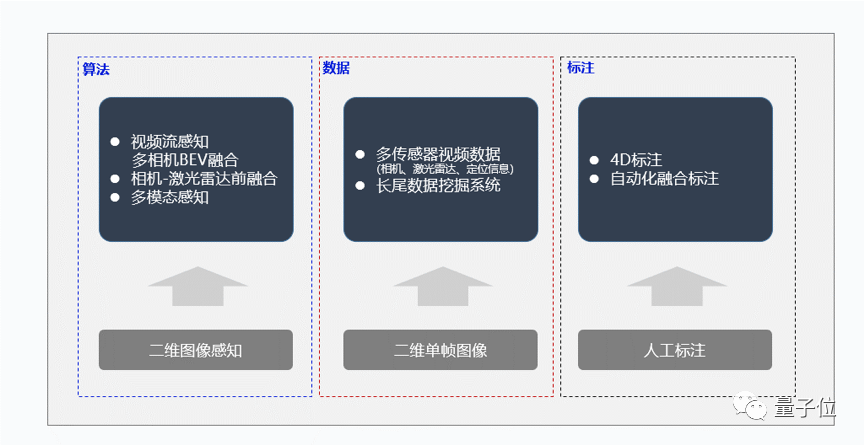
在统一的自动驾驶系统框架下,核心的感知算法模块也在进行相应创新,其中值得一提的是从经典感知到下一代感知算法的迭代。经典感知常基于二维的图像感知算法,即数据端结合二维的单帧图像做相应识别,标注端更多采用人工标注方式。
为此,我们提出“下一代感知算法”,即从算法上结合视频流感知、多相机BEV融合、相机-激光雷达前融合以及多模态感知,通过多种方式提供端到端更高精度的感知算法。在数据端,不仅依靠单帧数据,还结合包括相机、激光雷达和定位等多传感器的视频数据。此外,我们研发出长尾数据挖掘系统以扩展数据挖掘能力,还提出在标注端采用4D标注方式并提取丰富的时空序列信息。
端到端的感知模型设计方案的最大亮点是共享主干极大地降低了训练资源的开销,并节省模型嵌入式部署算力。此外,通过引入自注意力机制及对全局特征和局部特征的深层融合,模型特征表征能力得以提高。结合相关的网络设计和训练技巧,我们在YOLOP基础之上提出融入YOLOPV2的概念,该方案的性能和精度在BDD100k公开数据集三项感知任务中均达到了SOTA级别。
另外,中汽创智3D端到端的感知方案能够直接输出目标位置、大小和朝向,利用激光雷达的深度监督训练提升远距离目标检测精度。这一方案结合视觉3D和激光3D,共用一体化目标级后融合方案,实现多传感器融合、感知输出互补,目前我们能感知的距离已达到最高200米的可用范围。
我们采取的BEV前融合感知算法是以BEV特征编码和特征融合模块为核心,开发出多源异构输入下的大一统多模态前融合感知算法。它是一种松耦合算法,可以结合不同的传感器配置,如Camera-Lidar、Camera-Radar以及Camera-Lidar-Radar等多种传感器的融合方式。此套感知算法直接支持端到端的输出,利用Transformer Decoder操作来直接预测目标3D候选集,省略掉非常繁琐的后处理过程。
除了感知侧外,可能在实际行车中遇到的问题更多涉及的是决策侧。经过实践,我们认为不仅要结合传统的基于规则的决策,即按照场景的分类器,还要结合最新的学习与强化学习算法,比如说POMDP等。将两种决策方法和策略融合起来,一方面用传统的方法来保证它的鲁棒性,另一方面针对特殊的corner-case场景,用大量人类“老”司机的驾驶行为作为训练数据,使得自车在不同路况下的决策更加智能,更加鲁棒,最终大幅提高系统的行为决策能力。
在人工智能时代,如果将算法比喻成发动机的话,那数据就像燃料,其重要性不言而喻。数据方面的核心问题是数据量,针对此,中汽创智有着得天独厚的优势——结合股东方一汽、长安、东风和兄弟单位T3出行,我们具备一个数据生态联盟来共同支撑数据的获取。目前,大部分车企都具备大量的数据,但如何利用好海量数据、提高数据的使用率是值得思考的问题。中汽创智结合标注、采集、多模态融合、序列提取,用4种串行方式来实现1个融合的自动标注,从而降低80%以上的人工标注成本。
在技术工程学会的支持下,中汽创智也正在计划和推动结合相关股东方以及核心合作伙伴建立一个数据共建、共享的生态联盟,通过联盟形成统一的开发流、统一的标注标准,以及合理合规的数据共享交易机制。为实现此生态联盟,我们应更好地推动数据建设,特别是结合专用采集车和可能量产搭载的车辆,以及像T3出行这样的网约车、Robotaxi。
中汽创智有一套非常成熟的数据采集方法——收集不同感知设备的原始数据(包括车辆行为的总线数据、环境信息数据等),通过开发分类器自动筛选自动触发的方式,来采集Corner-case以及结构化信息。同时,我们还利用数据压缩的技术进行抽帧裁剪等,通过物理方式实现数据的交换,最终实现数据闭环和平台共享。数据会也同时反馈到量产车和T3出行的车辆上,通过OTA不断升级自动驾驶算法,也不断地对数据采集进行针对性的重新思考和界定。
前面陈述了算法和数据的量产实践,但规模化量产这件事的难度不仅在于技术问题,更重要的还有工程化问题。
在此方面,以前我在做L4的创业公司时,发现我们的同事和团队对于车企V模式了解并不多。但在实际开发过程中,为了更好地跟结合车企现有流程并融入其体系,量产车规级的系统开发流程是必不可少的。以领航辅助功能为例,在需求挖掘、功能定义、需求分析、系统设计、软件开发的不同阶段,通过 V模式从需求到实践到集成到反馈形成相应的闭环。通过用这套方法可以更好地适应现在整车厂频繁发现的问题需求变更,来更好地实现对于车企自动驾驶量产需求。
另外,在包括前面提到的算法和感知等整体的开发过程当中,功能安全应该是贯穿到整个开发流程的体系当中的。中汽创智也结合 ISO26262中功能安全模块的要求,增加到现有的ASPICES开发流程当中,从设计、从顶层的架构到后期的具体的代码、开发接口的设计等提出新的流程和体系,来确保开发质量和产品可靠性。除了开发流程,我们也认为在高阶的自动驾驶中,既然系统要承担驾驶的主体任务,那么安全冗余的架构也是必不可少的。
冗余方面也有不同的阶段,第一代实践之初是通过一个个相对来说较小较轻的智能前视的控制器再连接智能驾驶域控实现的,它是一个非对称的安全冗余架构。当自动驾驶域控制器失效时,智能控制器应具备独立控制能力,可以让车安全停下或者说避障等。但是,从成本的角度和实际的操作来看,这一架构还有很大的提升空间。针对高阶的系统、针对ASIL-D级的需求,我们提出物理级的安全冗余架构,即当前研发的对称表决逻辑架构,当SOC1和MCU1失效的时候,SOC2和MCU2会进行take over 安全冗余进阶,同时配合冗余的一个电源和传感器方案,可以实现刚提到的物理级安全冗余和系统ASIL-D的等级。
在这方面,中汽创智可以比较自豪地说,目前整套的开发体系已经在2021年获得了相应的ASIL-D级认证。
最后,我给大家播放下中汽创智的实践视频,拍摄点是在南京江宁区的核心路段,时间是在7月底的晚高峰,是随机抓拍了一段路测视频。如视频所见,这套算法目前已能在相对繁忙的公开城市道路上,自由地实现跟车变道,以及红绿灯的识别等。画面右上角是传感器视角所看到的实时画面。
如果大家对于加入中汽创智有兴趣,欢迎联系我们的招聘邮箱:t3caic@jobapply.cn。
关于中汽创智
中汽创智科技有限公司成立于2020年6月,由中国一汽、东风公司、南方工业集团、长安公司和南京市江宁经开科技共同出资160亿元。作为一家汽车科技公司,聚焦于智能底盘、新能动力和智能网联三大业务领域,开展前瞻、共性、平台、核心技术和关键零部件的研发及产业孵化。公司围绕“车端+云端+通信端”生态体系,做技术创新的引领者、产业孵化的践行者、数据服务的驱动者,致力于成为汽车产业安全的守护者、原创技术的策源地,智能驾驶是其中最主要的业务之一。
关于「量子位·视点」
量子位发起的CEO/CTO系列分享活动,不定期邀请前沿科技领域创业公司CEO/CTO,分享企业最新战略、最新技术、最新产品,与广大从业者、爱好者探讨前沿技术理论与产业实践。欢迎大家多多关注 ~
需要观看直播回放的小伙伴,请戳“阅读原文”吧~
— 完 —
「人工智能」、「智能汽车」微信社群邀你加入!
欢迎关注人工智能、智能汽车的小伙伴们加入我们,与AI从业者交流、切磋,不错过最新行业发展&技术进展。
ps.加好友请务必备注您的姓名-公司-职位哦~

点这里👇关注我,记得标星哦~
一键三连「分享」、「点赞」和「在看」
科技前沿进展日日相见~