机器人学习大会CoRL 2020 最佳论文出炉!华为诺亚、上海交大获最佳系统论文奖

最佳论文展示奖由南加州大学团队获得。
CoRL大会介绍
CoRL是一个新的以机器人学和机器学习为主题的年度国际会议。第一次会议已于2017年11月13日至15日在加利福尼亚州山景城举行,旨在汇聚约250名从事机器人学和机器学习领域的最优秀的研究者参会。 机器人技术,自主感知和控制领域正在经历一场机器学习革命,现在正是时候提供一个将机器学习的基本进展与机器人应用和理论的实证研究相结合的场所。 我们的目标是使CoRL成为机器人(机器)学习研究的首选大会。


最佳论文奖
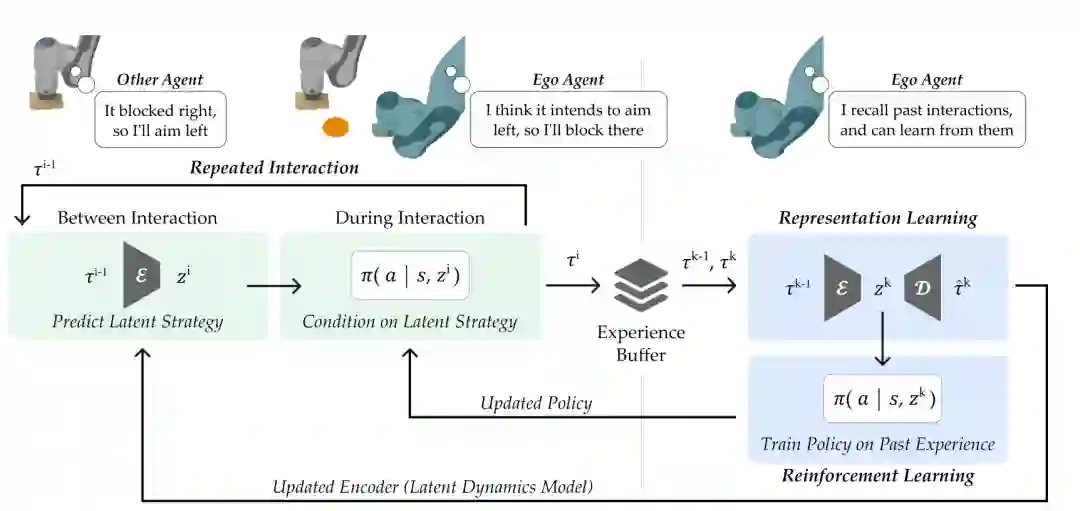
本次荣获CoRL最佳论文奖的是来自斯坦福大学和弗吉尼亚理工大学合作的《Learning Latent Representations to Influence Multi-Agent Interaction》。
论文链接:https://arxiv.org/pdf/2011.06619.pdf
作者: Annie Xie, Dylan P. Losey, Ryan Tolsma, Chelsea Finn, Dorsa Sadigh.
获奖理由:
本文提出了一个令人信服的解决方案,解决了包括竞争性物理机器人环境在内的多个领域的难题。
论文介绍:
智能体与人类或机器人的无缝交互很困难,因为现实环境是动态变化的,并根据自智能体的行为更新策略,而自智能体必须预测这些变化以随机应变。
受人类行为启发,我们认识到机器人不需要显式地为另一个智能体要进行的每一个低级动作建模;相反,我们可以通过高级表征来捕捉其他智能体的潜在策略。
我们提出了一个基于强化学习的学习框架来学习一个智能体策略的潜在表示,其中自智能体识别其行为与另一个智能体的未来策略之间的关系。
最佳系统论文奖
论文链接:https://arxiv.org/pdf/2010.09776.pdf
开源代码:https://github.com/huawei-noah/SMARTS.
Learning的方法可以为解决这个问题提供很多帮助,但是这一方法需要一个现实的多智能体模拟器,该模拟器会产生多种多样且有效的驾驶交互。
为了满足这一需求,我们开发了一个专用的仿真平台:SMARTS (Scalable Multi-Agent RL Training School):可扩展多智能体强化学习学校。
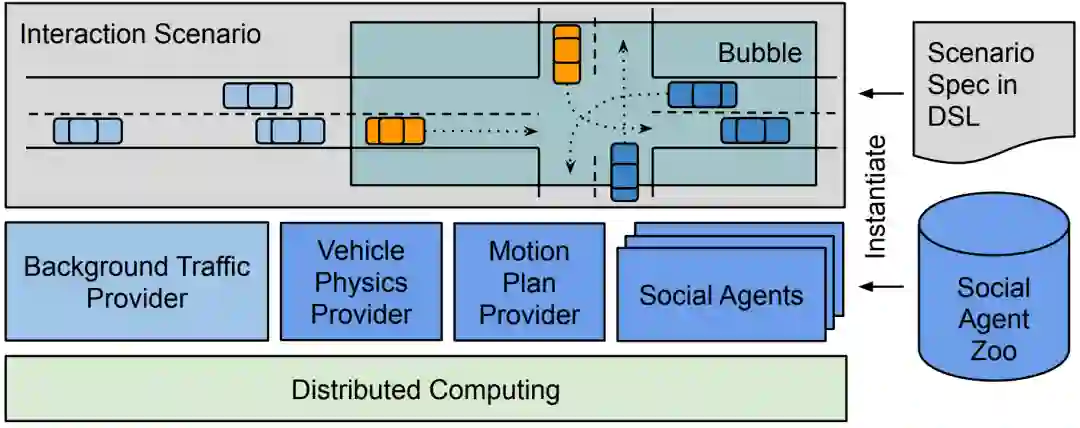
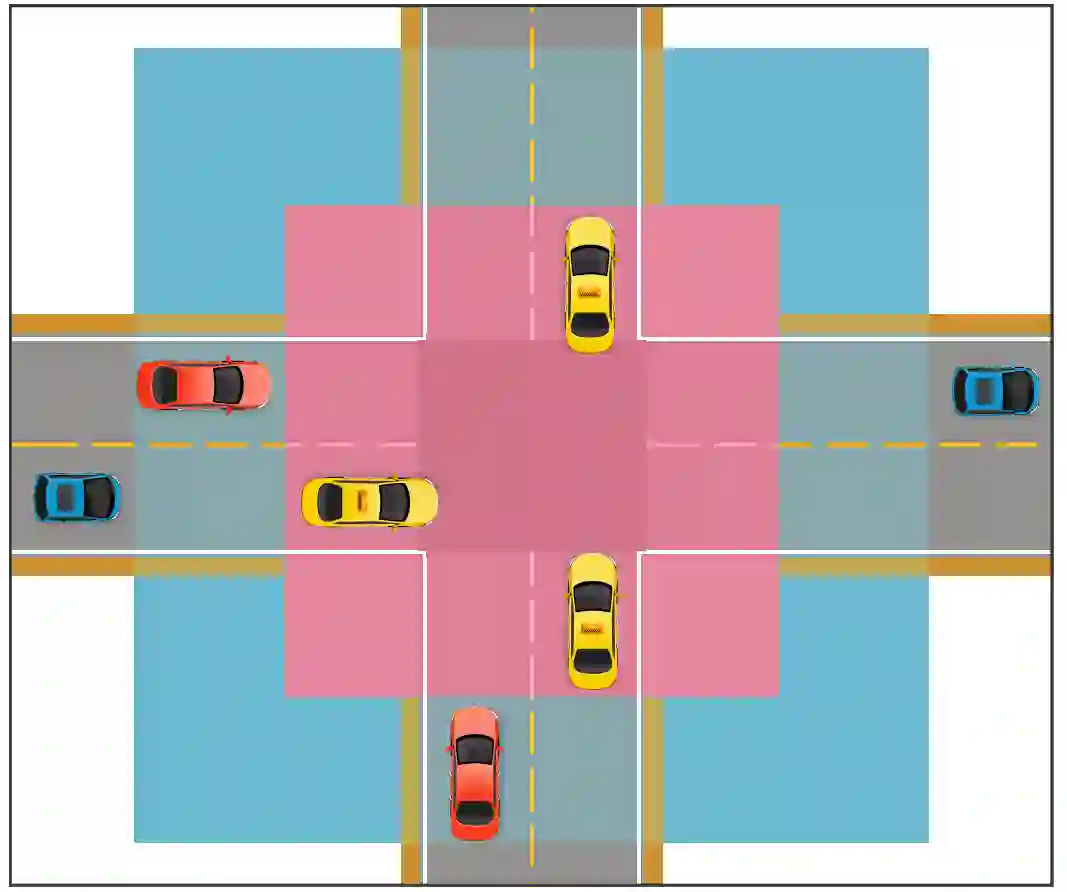
上图是SMARTS 模型架构,其交互方案是使用特定领域语言(DSL)定义的。Social智能体是从“ Social智能体Zoo”中实例化而来。橙色车辆由学智能体控制、深蓝色车辆由 Social智能体控制、浅蓝色车辆由交通服务提供商控制。
原则上,所有提供程序和智能体都可以在自己的进程中运行,也可以远程运行。
SMARTS支持训练、积累和使用道路用户的各种行为模型,这些反过来又可以用于创建越来越现实和多样化的交互,从而可以对多智能体交互进行更深入、更广泛的研究。
在本文中,我们描述了SMARTS的设计目标,解释了SMARTS的基本体系架构和关键功能,并通过在交互场景中进行具体的多智能体实验来说明其用法。
最后,我们开源了SMARTS平台以及相关的基准测试任务和性能评估指标,以鼓励和支持针对自动驾驶的多智能体学习的研究。
最佳论文展示奖
本次荣获CoRL 2020最佳论文展示奖的是来自南加州大学的一篇论文:
《Accelerating Reinforcement Learning with Learned Skill Priors》。
论文链接:https://arxiv.org/pdf/2010.11944.pdf
项目主页:https://clvrai.github.io/spirl/
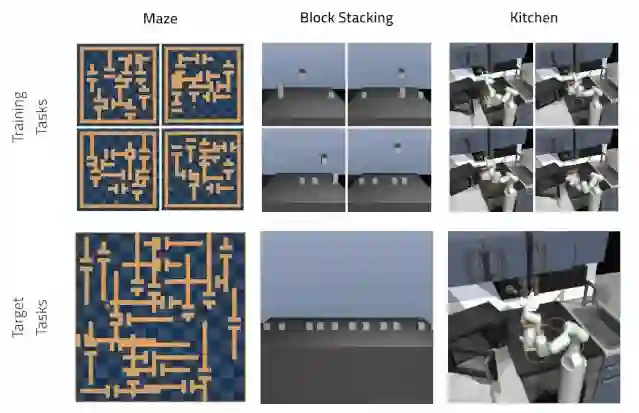
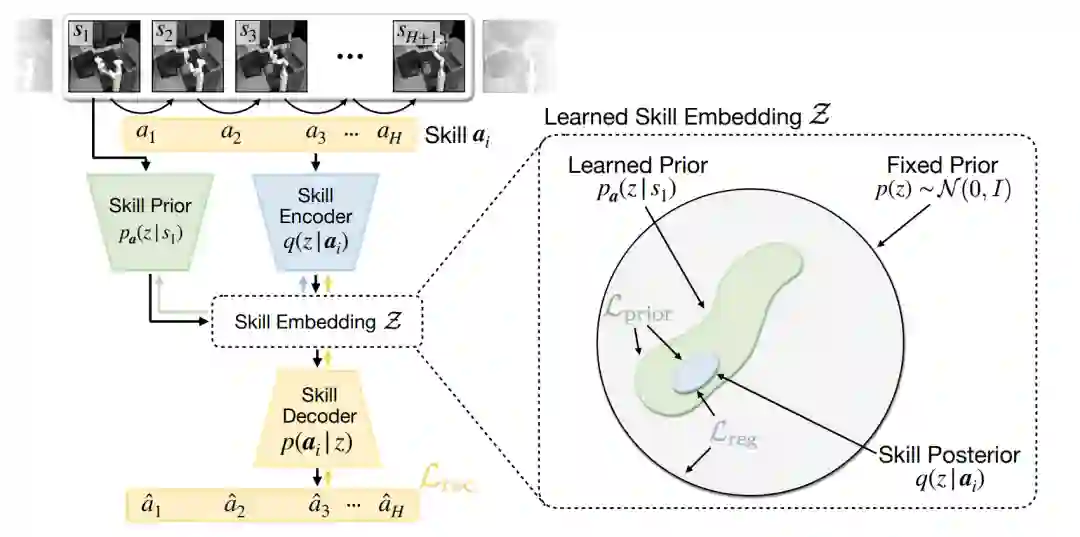 该模型可以从离线智能体经验中共同学习技能的嵌入空间和技能。
该模型可以从离线智能体经验中共同学习技能的嵌入空间和技能。
然后,我们扩展常见的最大熵RL方法以使用先验技能来指导下游学习。我们在复杂的导航和机器人操纵任务上验证了我们的方法SPiRL(Skill-Prior RL),并证明了学习先验技能对于从丰富数据集中进行有效技能迁移至关重要。
最佳论文展示奖提名:



点击阅读原文,直达EMNLP小组!