吴奖人物丨实现智能康复,赋能社会民生——访电子科技大学教授、博士生导师程洪
人工智能人物访谈篇之十九
程洪教授是电子科技大学教授、博士生导师,机器人研究中心执行主任。近年来,程洪教授一直致力于人工智能与机器人基础理论及应用的创新研究。作为技术总负责人开发完成了具有国际领先水平的个人助行外骨骼机器人系统(AssItive DEvice for paRalyzed patient,AIDER),是国内首批获得医疗器械注册证的外骨骼康复设备,目前已经帮助100多名截瘫患者实现重新站立、行走的愿望。
获奖人物介绍

程洪,电子科技大学教授、博士生导师,机器人研究中心执行主任。IEEE高级会员,四川省医学会第一届医用机器人和医学智能化专业委员会副主任委员。2012年8月,创建布法罗机器人科技有限公司。先后主持和完成国家级项目共6项,其中重点研发计划1项,工信部项目1项,联合重点支持项目1项,面上项目3项,及国家863高技术计划、973计划等资助的各类科研项目,取得多项创造性成果。与郑南宁院士合编教材1部,独著英文专著2部(共计下载36000余次),在IEEE TCSVT等国际重要期刊及IROS/ICRA等顶级国际会议发表论文110篇,其中SCI论文40篇,在JCR二区以上杂志以及机器人国际顶级会议等发表论文30篇以上,谷歌学术引用高于2000次,H因子为20。申请国家发明专利110项,授权56项,其中16项已实现成果转化和产业化应用。2010年获教育部新世纪优秀人才计划,2012年入选电子科技大学百人计划,2013年成为四川省千人计划特聘专家,2015年所带领团队获外骨骼机器人四川省青年科技创新研究团队。2017年,凭借“物理紧耦合人机系统关键技术及其应用”项目成果,获得吴文俊人工智能科技进步奖一等奖。2018年获得成都市蓉漂人才计划特聘专家称号。
人工智能人物:您带领团队从零开始外骨骼机器人研发遇到过哪些难题?是如何解决的?
程洪:当时主要遇到了两大难题:(一)关于外骨骼机器人国内外公开研究资料太少、跨学科人员交流和系统集成非常困难,我们研发了2年,好不容易将自动化、机电、计算机等学科融合后,建立第一套外骨骼机器人原型系统;(二)我们信心满满的找到了第一位截瘫病人试穿外骨骼,但是截瘫病人却穿不上我们的外骨骼机器人,这才发现我们缺乏医学知识。医工结合绝对不是简单的四个字,需要在设计、制造、调试过程都需要考虑。不过,我们不气馁,跟截瘫专家和患者进行反复沟通,在医院进行反复试验,并进行系统迭代,终于成功做出了一款真正可用于截瘫患者的外骨骼机器人。
人工智能人物:您的研究成果取得了哪些有较大影响的理论和技术突破?
程洪:团队初步建立物理人机混合系统基本理论,取得的技术突破:(一)建立了穿戴者和外骨骼系统的物理交互的建模;(二)提出了基于强化学习的物理人机交互及交互动力学模型的在线参数学习算法,避免了离线学习无法适应动态环境的情况,提高了系统环境适应性;(三)提出了面向真实场景的人机双向交互接口鲁棒算法,提高了系统自然互融性。

人工智能人物:第四代外骨骼机器人与前几代相比,有哪些进展?
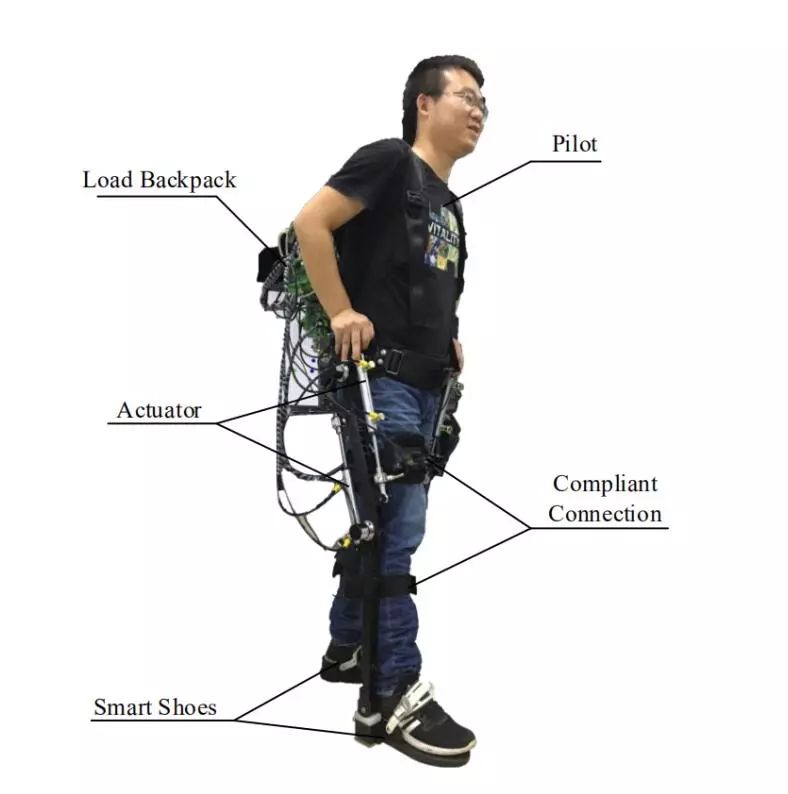
程洪:第四代外骨骼机器人在第三代的基础上,优化了整机重量和续航,采取更加智能的算法;在平地行走的基础上,增加了自动上下楼梯功能;并且采用全新人机交互方案,外骨骼实时感知穿戴者意图进行动作,不需要拐杖按钮即可实现穿戴者意图的理解。有两个智能化产物:智能鞋和拐杖。一方面,智能鞋在台阶上行走的时候,因具有激光检测功能,会通过传感器判断上下楼梯的指令并且可以检测上下楼梯动作的完成度和安全性。另一方面,智能拐杖不仅可以接受人的意图,还能通过计算生成拟人化的步态,辅助行走。

人工智能人物:外骨骼机器人目前有哪些实际应用?对人工智能技术应用有何实际推动?
程洪:外骨骼机器人可以广泛应用于康复医学、国防军事、工业装配等领域。通过外骨骼机械装置,解决穿戴者下肢瘫痪导致无法站立问题;通过人因设计,帮助穿戴实现个人可以独立穿戴使用;通过内部电机传动控制系统,帮助残疾人解决下肢不能运动问题;通过拟人化自然步态,帮助穿戴者重新实现自主、自然行走;通过多传感技术融合,帮助穿戴者应对多种复杂地形环境。截瘫患者穿戴外骨骼,可以充分激发患者残留的身体机能,锻炼患者肌肉运动能力,防止肌肉萎缩,刺激患者相应神经,减少褥疮、尿路感染等并发症发生,加快身体恢复速度,帮助患者重拾生活的自信。
我们的终极目标是实现帮助残疾人实现重新融入生活,所以我们除了站立行走以外,还会也会逐渐赋予外骨骼处理斜坡、楼梯、地毯等环境的能力,并且逐渐添加新功能,让外骨骼能够应对医院、家庭、日常的城市环境甚至将来的户外环境。
下肢助行外骨骼系统是典型的集生、机、电一体人工智能混合体,也是人工智能技术与康复医学结合的人机混合智能增强实际产物,外骨骼的出现,切实推动了“人工智能+场景应用”在医疗方向的发展,也为人工智能技术在安防、汽车等方向的应用推进提供了宝贵经验,也成为了其他人机混合智能体的诞生的信心之源。
人工智能人物:能介绍一下您的实验室和研究团队吗?
程洪:电子科技大学机器人研究中心是我校首批特色研究中心,是电子科技大学“双一流”学科群重点建设平台。中心以人工智能/机器人技术创新和研发为核心,以国家在康复医疗、智能网联汽车、军民融合方面的战略发展为契机,立足于服务地方经济,集学校计算机、自动化和机电等学科优势,建立一个跨学科的机器人特色研究共享平台。中心以社会机器人基础研究及应用为主线,开展计算机视觉、机器学习、智能控制及人机交互等领域的核心技术的创新研究,并探索在智慧康复医疗、智能驾驶等新兴行业的应用研发。主要科研成果和在研项目有:机器学习方法基础及物理人机交互、视觉人机交互等、外骨骼机器人、智能网联汽车、仿生四足机器人。
中心主要研究社会机器人为主,工业机器人为辅,在机器学习和模式识别、人机交互技术、自主导航和智能控制等方面建立赶超国际先进水平。中心目前有固定研究人员50人,其中国家杰出人才4人,省部级杰出人才6人,教授12人,副教授18人。
人工智能人物:您在获奖后的研究方向是什么?获奖后研究有什么最新进展?
程洪:研究方向主要聚焦于人机混合智能系统,深入研究人机混合系统问题,最终形成了三大核心技术:
一是人机系统交互参数建模及适配,以此为基础研发了外骨骼设备。外骨骼是帮助脊髓损伤患者的一个强有力的工具,已经初步具备了广泛应用于各种生活场景的可能。未来还有很大的提升空间,比如克服体积和重量较大,缺乏柔韧性且造价昂贵等缺点,以及更好地模拟人的步态,达到正常人走路的速度。产业、学校、科研机构等相互配合,发挥各自优势,让科研成果可以更好、更快地实现产业化,到达患者身边。多年从业经验,有较强影响力的康复专家加盟,能够更加准确地定位患者实际需求。
二是快速人体运动意图感知及预测,在此基础上形成了相应人机交互模型,并将后期方向瞄准脑机接口。脑机接口(Brain computer interface, BCI)是一种不依赖于大脑外周神经与肌肉组成的正常输出通路的通讯控制系统。它通过某些技术手段来获取大脑活动的信号,通过信号处理、特征提取等方法识别出人的意图,并将该意图转化为控制指令来实现人机间的交流。但这个技术目前不具有普适性,仍面临着一系列的挑战,一是提高输入信号采集的稳定性和可靠性。如何从复杂的脑信号中有效提取所需要的信号,提高信号识别准确率,有待进一步研究。二是提高BCI系统的可操作性。如果用户需要花费大量时间精力才能有效掌握BCI系统的使用,会降低使用的意愿。三是有效控制设备成本。只有对信号采集和信号处理设备的成本进行有效控制,才能是BCI系统更加经济实用。当然要降低成本,信号处理算法亟需进一步深入研究。
三是基于增强学习的智能步态规划,在此基础上赋予外骨骼增强学习能力,后续主要关注步态规划的智能性,实际提示外骨骼对多场景自适应能力。由于实际应用环境的开放性、动态性,外骨骼及穿戴者组成的人机系统需要有较强的环境适应能力,赋予外骨骼更高的智能性可以实现步态规划对环境的适应,同时提升外骨骼学习能力。
这三大核心技术目前已经初步通过下肢步行外骨骼设备完成应用落地:今年十月份成功取得国家CFDA注册证,成为国内首批获得医疗器械注册证的外骨骼康复设备,目前已经帮助100多名截瘫患者实现重新站立、行走的愿望;同时,我们在CCTV1《机智过人》舞台上,通过外骨骼机器人帮助截瘫12年、重新站立的概率几乎为零的女警察实现重新站立、行走,科技成就奇迹,获得极高的社会关注、评价,为中国130万截瘫人群打开了一扇希望的窗!

获奖项目成果
物理紧耦合人机智能系统是综合人体、可穿戴机械、传感器、驱动器、计算单元等的多维复杂生机电系统,通过生物、计算、控制、机械等技术的有机融合与深度协作以及人机物理上紧密接触实现人体和可穿戴机器有机协作,达到实时感知、动态控制和人机互融、信息服务等目的。典型应用包括面向康复医疗的外骨骼以及面向单兵助力的外骨骼两种形式。其成功研发不仅能够极大提高人工智能技术在我国康复医疗事业的应用,具有非常深远是社会意义,同时从国家层面来讲,能够提高我国单兵作战型外骨骼的智能化程度,达到与国际同等水平,具有战略意义。国际上包括美国、日本、以色列、新西兰等国家都投入了巨大的人力物力来针对性的进行技术研发和系统开发,例如美国的EKSO系统,以色列的ReWalk,日本的HAL以及新西兰的REX。
受限于外骨骼机器人的核心技术水平以及国外的技术封锁,目前国内外骨骼机器人都只能特定简单环境中执行较为简单的步态运动,不具备智能化的人机交互能力和人体运动意图感知能力,严重制约推广应用。涵盖智能人机适配技术、人体运动意图感知及预测技术以及智能人体步态规划技术问题的可穿戴外骨骼机器人研究成为了外骨骼机器人发展的制高点,对外骨骼机器人产业发展和推广应用具有不可替代的支撑和引领作用。

该项目面向国家重大战略需求,电子科技大学团队从2010年开始在多个国家自然科学基金项目的支持下,完成了可穿戴外骨骼机器人原型样机系统的研发,针对外骨骼机器人核心技术与应用瓶颈,围绕目前迫切需要攻克的智能人机交互、人体运动意图感知及预测以及人机混合系统智能控制技术难题开展了技术攻关。
1.人机系统交互参数建模及适配。提出了外骨骼步态运动的自动人机适配技术,充分考虑了人体结构、多模态异常步态特征信息,建立了基于人因工效学的外骨骼仿生自适应结构和改良的弹簧阻尼模型,实现了对多种人体和不同步态的自适应匹配。
2.快速人体运动意图感知及预测。建立了外骨骼与人体之间的交互信息和动力学因子的多种非线性映射模型,提出针对该模型的非参数学习方法,实现了对人体运动意图的在线感知和预测。同时,该项研究发现了移动过程中人机交互力可通过时变非线性映射与操作者关节角度、外骨骼关节角度、速度和加速度计算,人机交互力与人体关节的速度、加速度仅存在弱关联。
3. 基于增强学习的智能步态规划。非周期性步态规划一直是步态规划技术中的一个难点。该研究针对这一难点,提出了物理人机交互中的动力学模型在线学习技术,利用增强学习算法首次实现了对外骨骼穿戴者非周期步态的实时在线参数测量和建模。并且提出了面向人机耦合系统中的模糊阻尼控制技术,提高了人机耦合系统对不同人群的步态规划控制适应性。
通过6年的技术攻关,目前该项目申请国家发明专利90项,其中获得授权专利30项。同时,发表学术论文70篇。2016年8月开始,该项目已经开始在布法罗机器人科技(成都)有限公司进行产业化和临床应用推广。
程洪:人工智能技术研究、应用需要结合场景,切实推动“人工智能+场景应用”。目前人工智能算法学术研究主要停留在针对一些封闭的数据库做测试,实际应用环境是开放的、动态的,封闭的数据库和开发的应用环境之间的鸿沟,容易造成人工智能落地困难;人工智能研究、应用应该结合目标场景特性,找准场景难点,有针对地解决场景痛点,促进人工智能技术落地,切实推动国家人工智能技术发展。
人工智能要与康复医学,实现智能康复。瞄准传统康复痛点,借鉴康复专家经验,结合康复患者需求,提升康复医疗设备智能性,建立基于大数据、云存储的人工智能康复平台,解放医生劳力,为康复患者提供更加精准、有效的康复评定、治疗方案,降低康复成本,实现智能康复,赋能社会民生。






