两种图像骨架提取算法的研究原理及实现
图像骨架提取,实际上就是提取目标在图像上的中心像素轮廓。说白了就是以目标中心为准,对目标进行细化,一般细化后的目标都是单层像素宽度。比如输入图像是这样:
输出骨架图像(红色)

关于骨架提取,现存的算法有一千种以上(论文[1]中谈到,There are more than one thousand algorithms that have been published on this topic)。论文[1]中提到,所有的骨架提取算法无外乎分为迭代和非迭代两大类。在迭代算法中,又分为并行迭代和顺序迭代两种。
本文分别介绍两种提取算法,它们分别来源于论文[1](K3M顺序迭代)、[2](Zhang-Suenalgorithm,并行迭代)。
这两种方法都是对二值图像操作的,思想都是从目标外围往目标中心,利用以待检测像素为中心3*3像素窗口的特征,对目标不断腐蚀细化,直至腐蚀到不能再腐蚀(单层像素宽度),就得到了图像的骨架。下面详细介绍一下两种骨架提取算法。
一 K3M
该算法的思想是,提取目标外围轮廓,然后利用轮廓腐蚀目标图像边界(这是一次迭代过程),直至腐蚀到不能再腐蚀。
算法分为两块
第一块,不断腐蚀,提取出伪骨架(部分区域有两层像素宽度,但已经很接近真实骨架)。
第二块,从伪骨架中提取真实骨架。
第一块:提取出伪骨架
每次迭代共有6步。不断迭代,直至某次迭代的过程,目标边界中没有新的像素被腐蚀,那么此时,剩余的目标图像像素就很接近于真实骨架(称之为伪骨架)。
<1>提取最新目标轮廓(初始为原目标轮廓)并记录这些轮廓点。
<2>依次检测这些轮廓点的8像素邻域,是否只含有3连通像素,如果有,把此点从轮廓点删除,并在目标图像中删除(腐蚀掉)对应点。
<3>依次检测<2>中剩余轮廓点的8像素邻域,是否只含有3 or 4连通像素,如果有,把此点从轮廓点删除,并在目标图像中删除(腐蚀掉)对应点。
<4>依次检测<3>中剩余轮廓点的8像素邻域,是否只含有3 or 4 or 5连通像素,如果有,把此点从轮廓点删除,并在目标图像中删除(腐蚀掉)对应点。
<5>依次检测<4>中剩余轮廓点的8像素邻域,是否只含有3 or 4 or 5 or 6连通像素,如果有,把此点从轮廓点删除,并在目标图像中删除(腐蚀掉)对应点。
<6>依次检测<5>中剩余轮廓点的8像素邻域,是否只含有3 or 4 or 5 or 6 or 7连通像素,如果有,把此点从轮廓点删除,并在目标图像中删除(腐蚀掉)对应点。
这是一次迭代过程的最后一步,如果在这步骤中仍有像素被腐蚀,说明除了真实骨架还有”肉”,仍需继续腐蚀边界。这一步骤是算法迭代的终止条件。
第二块 从伪骨架中提取真实骨架
算法第一块得到的伪骨架有部分区域是两个像素宽度,而目标骨架是单层像素宽度。所以,通过下面这一步骤提取最终骨架:
依次检测目标图像中,伪骨架的8像素邻域,是否只含有2 or 3 or 4 or 5 or 6 or 7连通像素,如果有,把此点从伪骨架中删除(腐蚀),就得了最终的骨架。
该论文对像素p的8邻域进行了权重编码:对判断像素点p周围8邻域的最大连通区域,是否只含有n(2<n<7)连通像素,进行加速。如下图
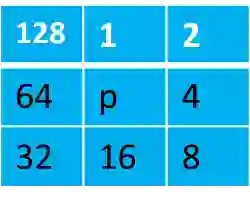
比如判断点p的8邻域是否只含有2连通的区域,可以这样实现:
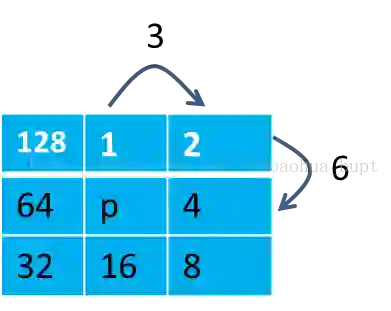
把相邻2连通像素两两相加,会得到一个这样的集合c2{3,6,12,24,48,96,192,129},
由于操作的是二值图像,在判断p的8邻域的最大连通域是否只含有2连通域时,只需要对p的8邻域进行加权相加得到一个值,记作p2,然后去c2里查询,如果c2里有p2,则点p周围的8邻域只含有2连通的区域。比如:
这样的加权方式,使得每个可能出现的n(2<n<7)连通邻域像素区域都对应一个不同的值。
原文中查询集合:
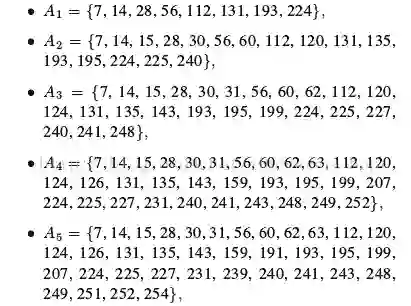
A1=3连通,{}
A2=3or4连通,
A3=3 or 4 or 5连通,
A4=3 or 4 or 5 or 6连通,
A5=3 or 4 or 5 or 6 or 7连通
A0=2 or3 or 4 or 5 or 6 or 7连通
需要注意的是,每次迭代中的每一小步顺序不能变,否则会在腐蚀拐点的时候出现漏网之鱼,随着迭代的次数增加,效果就会和真实的骨架偏差越来越大。
二 Zhang-Suen algorithm
这个算法是论文[2]提出的,该算法每一次的迭代步骤是对符合特定条件的目标像素,进行腐蚀,效果就是目标变得越来越细。不断的迭代,直到在上一次腐蚀后的目标在本轮操作中,没有新的像素点被腐蚀,算法结束。
下面说一下此算法的四个条件:
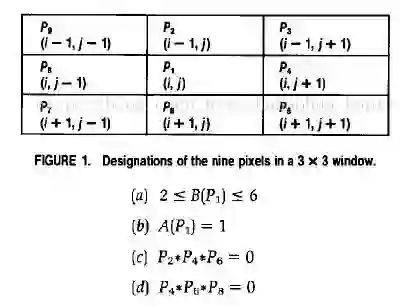
条件(a):中心像素P1周围的目标像素(二值中的1)的个数之和在2和6之间。
条件(b): 8邻域像素中,按顺时针方向,相邻两个像素出现0->1的次数。
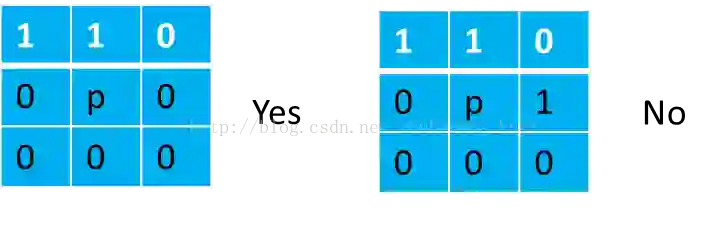
比如,下面这个例子,A(P1)=2。

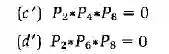
条件(c)(d)有两种模式,一种上面提到过,下面是另一种。
Zhang-Suen thinning steps:
While points are deleted do
For all pixels p(i,j) do
if (a)2 ≤ B(P1) ≤ 6
(b) A(P1) = 1
(c) Apply oneof the following:
1. P2 x P4 x P6 = 0 in odd iterations
2. P2 x P4 x P8 = 0 in even iterations
(d) Apply oneof the following:
1. P4 x P6 x P8 = 0 in odd iterations
2. P2 x P6 x P8 = 0 in even iteration
then
Deletepixel p(i,j)
endif
end for
end while
算法代码实现:https://github.com/ExtremeMart/SkeletonExtraction
参考论文
[1]K3M: A UNIVERSAL ALGORITHM FOR IMAGE SKELETONIZATION AND A REVIEW OF THINNING TECHNIQUES
[2]A fast parallel algorithm for thinning digital patterns
*推荐文章*
AOGNet:基于深度 AND-OR 语法网络的目标识别方法
从一篇ICLR'2017被拒论文谈起:行走在GAN的Latent Space
加入极市Email List (http://extremevision.mikecrm.com/pdKKGSx),获取极市最新项目需求,以及前沿视觉资讯等。