最快 5 年,我们就能实现自动驾驶了?
⬆️点击上方收看视频⬆️
自动驾驶之路
我们离自动驾驶还有多远?
要回答这个问题,得知道现在的辅助驾驶是个什么水平。现在大家能买到的最高等辅助驾驶功能,叫城市辅助驾驶。城市环境对辅助驾驶的考验远甚于系统还要识别更复杂的标线和信号灯,应付川流不息的行人,或者突然杀出来的电动车。高楼对定位信号还有影响,车子连“我在哪儿”都不知道,完全没法实现 A 点到 B 点的辅助驾驶。
硬件还不是最核心的问题。有朋友会说了,按照第一性原理思考,辅助驾驶不就是避免碰撞嘛,遇到障碍,我们停下来等一阵就行。但在城市里,你要等的话,很可能等到地老天荒。所以辅助驾驶算法,也要有决策能力,不能一味地靠停车让行解决问题。
汽车有决策能力,对目标和事件进行反应,根据我国《汽车驾驶自动化分级国家推荐标准》也就是 GB/T 40429-2021 对自动化等级的分类,就是从“组合驾驶辅助”功能进化成“有条件自动驾驶”,相当于从 L2 走向 L3 必须经过的一步。

城市辅助驾驶是点到点辅助驾驶的最大和最后一环,它一旦实现,辅助驾驶的场景就补全了,自动驾驶也不会太远。

如何摸到“天花板”
比如传感器,到了城市辅助驾驶的阶段,它就不能只知道“那里有个东西”就完了,还得读懂红绿灯、标线这些。前面这种对物体空间位置的感知,叫“几何感知”,后面这种对物体属性、意图、类型的感知,则称为“语义感知”。

城市辅助驾驶对语义感知的需求,是几何级增长的。而最擅长完成这个任务的,是视觉传感器。而且工程师在实践中发现,通过计算物体占据的像素数量变化,还能测出物体与车的大概距离,连毫米波雷达负责的几何感知都包圆了。一辆宣称要实现城市辅助驾驶的车辆,不一定有环绕全车的毫米波雷达,但一定有环绕全车的视觉感知。

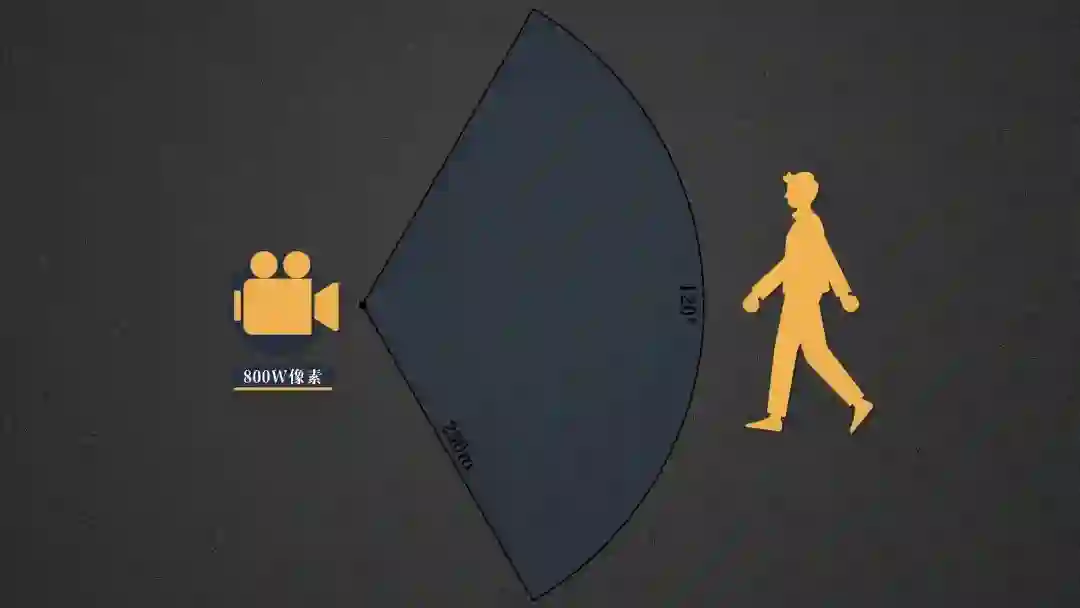
但在城市辅助驾驶到来之际,开始用 800 万像素高清摄像头,相当于从功能机时代一步跨进了 iPhone 6 时期。摄像头的视场角和探测距离是相互矛盾的:一个 200 万像素的摄像头,在 150 米探测距离视野宽度只有 50 度;而现在,一颗 800 万像素摄像头可以在 250 米探测距离上实现 120 度视场角,不仅看得更远,而且看得更宽。
以特斯拉为代表的纯视觉派认为要做减法,光靠摄像头,够了:既然人能靠两个眼睛开车,那么按照第一性原理,车也可以只用摄像头,毫米波雷达就可有可无了。不过还有一派认为纯视觉不够,要做加法——增加激光雷达。
激光雷达的优势是超强几何感知能力。当前多摄像头视觉系统,几何感知的误差可以做到 0.4%,就是 100 米测距误差 40 厘米。但激光雷达的误差只有厘米级,就像通过触觉传达语义信息的盲文愿意,激光雷达的几何感知达到某种高度之后,也就有了语义感知能力。

不过在纯视觉派眼里,激光雷达也并非万能,比如激光的能量需要考虑对人眼的安全性。量产的车载激光雷达主要通过使用 905-1550 纳米长波光源和限制功率,保证人眼安全性。然而限制功率就限制了激光雷达的探测距离。已经量产的车用激光雷达 10% 反射率最大探测距离只有 150 米左右;而视觉感知系统配备高清摄像头后,有效探测距离在 600-1000 米。另外激光光束也可能雨雪吸收,削弱整车感知能力。目前的激光雷达,还是作为视觉感知的辅助存在。

传感器一多,产生的数据量就更多,对计算能力的要求就升高了。我们统计了市面上实现高速辅助驾驶、和准备推出城市辅助驾驶的车辆,它们的算力水平。结果发现,要实现高速辅助驾驶,这个算力门槛是 2.5TOPS;而城市辅助驾驶的门槛是 30TOPS——实现城市辅助驾驶所需的算法模型、博弈策略,必须匹配更强的计算硬件。

现在的“智能汽车”算力,已经堆到 1000TOPS 以上。再翻一倍,到 2000TOPS 这个级别,基本已经是自动驾驶公司测试车的水平。这个数字是不是越大越好呢?其实选用哪个级别的算力,不同厂家都有自己的规划,这也跟算法模型构造能力、跟工程师对一辆车的功能预测、跟消费者愿意付费的成本有关。
最后一公里,有多远?
实现城市辅助驾驶后,一些公司还在往非铺装道路的自动驾驶前进。他们搞出了机器人和机器马,给它们搭载辅助驾驶的传感器和计算单元,让它们在没标线的地方自己寻路……种种迹象表明,似乎再等五到十年,自动驾驶就能真正实现了。

不过再多的传感器,再强的计算机,都只是水桶的长板——这个桶的桶底是算法,或者更深一点,是人工智能。一说人工智能,我就想起计算机视觉和人工智能专家朱松纯教授,那个关于乌鸦和鹦鹉的故事:鹦鹉在人的反复训练下,可以模仿人类的语言,但鹦鹉理解不了人类语言的涵义。乌鸦同样只有那么点脑子,却会制造工具,甚至可以自发理解信号灯、车流和行人之间复杂的因果关系。这就是朱教授所说的“鹦鹉范式”和“乌鸦范式”。

把这个问题投射到自动驾驶上,很多自动驾驶公司和车企都在做“训练鹦鹉”的事——建造更多模型,用量产车行驶数据反哺算法,甚至为 AI 搭建元宇宙般的虚拟空间,训练它应对 Corner Case……但是,我们还没有看到哪家公司,想让 AI 像人一样思考驾驶问题。
其实也好理解,这件就是所谓的“AI 奇点”,就是人工智能超越人类智能的时刻。有人担心这个时刻到来后,就像《黑客帝国》里描绘的世界一样,人类会被 AI 灭绝,也就无所谓自动驾驶了。基于这个逻辑,有些朋友悲观地认为自动驾驶永远不可能实现。到这个层面,自动驾驶好像不是技术问题而是哲学问题了。

应该算介于两者之间。首先,这肯定还是个技术问题,它不能永远只靠标注-训练-再标注实现自动驾驶,因为永远有长尾问题,有一天会爆雷;但也不至于要等机器学会像人一样思考时,才有实现的可能。今天的城市辅助驾驶,明天的“非铺装路面辅助驾驶”,后天可能还有我们今天想不到的东西出现。就像传说中忒休斯的船那样,我们把一个个问题替换成一个个解决方案,或许有一天我们坐在车里,会突然发现,哦!原来自动驾驶时代,已经在我们身边了。

摩托罗拉 moto edge X30 免费送

全球首发骁龙 8 Gen1,摩托罗拉翻身之作?本期 ZEALER众测 重磅上线 moto edge X30 !首发高通新一代8 Gen1 旗舰芯片,超大底前后三主摄,一拍即可测量心率血氧。宣称「硬核实力」的 moto edge X30 究竟有多硬核?就等你来体验!扫上方二维码或戳左下角「阅读原文」即可抢鲜试用。

『热 门 推 荐』