卡内基梅隆大学新型六足机器人,爬坡、抓地功夫了得!可实现45°悬垂
导读
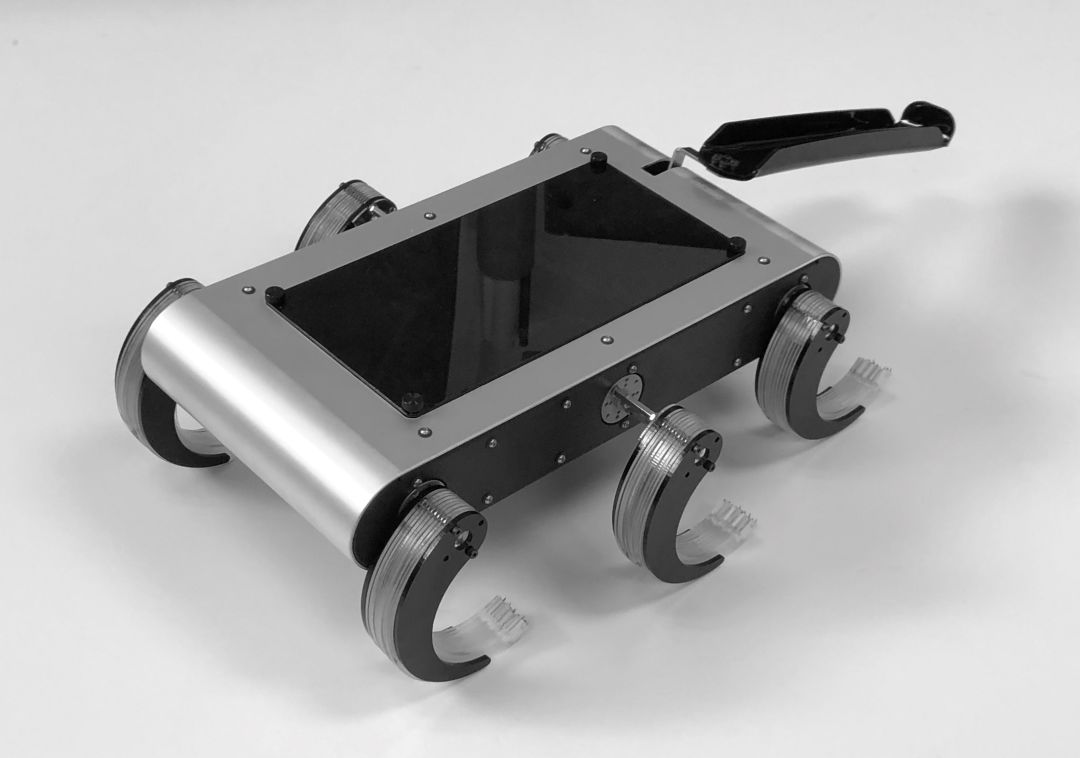
T-Rhex是一种“脚”上有微小“锥形脚趾”的六足机器人。它能通过特殊结构爬上陡峭的斜坡并抓住粗糙的表面,例如砖、木头和混凝土等。虽然这个机器人还不能爬上垂直的墙壁,但它可以悬挂在上面。
作者:Monday
卡内基梅隆大学有一门叫做“机器人设计与实验”的课程,这门课要求学生们用一学期的时间,基于一个主题来设计和构建一个机器人系统。今年春天,这个主题被定义为“仿生机器人”。这是学生们最爱的主题之一,因为动物可以做各种各样让大家觉得“疯狂的事情”,并且看机器人“模仿”动物,产生“独特的能力”,也让学生们觉得非常有趣。T-Rhex机器人就是在这样的背景下被设计出来的。

T-Rhex研发自一个叫做“科学鹦鹉”的团队,这个项目是RHex的新版本。T-Rhex的发音为T-Rex,和一种恐龙的发音相同。T-Rhex有一个“尾巴”,更重要的是,还有微小的“锥形脚趾”。这种脚趾可以帮助T-Rhex抓住粗糙的表面,比如砖、木头或混凝土。这也让T-Rhex可以爬上非常陡峭的斜坡,并且悬挂在上面,脚趾能够防止它掉落下来。

T-Rhex的这种“脚趾”被叫做”microspines”,在不少机器人身上都有过应用。比如美国喷射引擎推进实验室(JetPropulsion Laboratory)著名的攀岩机器人Lemur IIb。这种脚趾的概念至少可以追溯到斯坦福大学十几年前的Spinybot机器人。

(攀岩机器人Lemur IIb)
T-Rhex在攀爬时,看起来有条不紊,因为“脚趾”要小心地与地面“接合”和“脱离”,这也限制了它的非攀爬机动性。
仔细观察T-Rhex的运动,你会发现在它正常的向前步态中,它是在用“脚踝”行走,而不是“脚趾”。这意味着” microspines”大部分时候都没有被“接合”,这样机器人就可以利用其常规的腿部的运动来四处走动。由于T-Rhex的所有运动本质上都是机械的,而且它没有主动传感器,再加上它特殊的运动形态,所以它也不需要一个头部的结构。
T-Rhex虽然不能征服垂直的墙壁,但它能爬到55度的坡度上。最令研究人员惊讶的是,它能够紧贴表面,在135度的斜坡上“闲逛”,这是一种45度的悬垂!
有关这个项目的更多详细信息,IEEE Spectrum通过电子邮件与项目团队成员(和CMU博士生)Catherine Pavlov进行了交流。

IEEESpectrum:我们曾经在RHex机器人身上看到高度顺应性、具有弹性的腿,那T-RHex机器人的腿是如何驱动其移动的呢?
CatherinePavlov:T-RHex的腿也有一定的顺应性,但没有Rhex那么好。T-RHex的腿由塑胶制得,选择塑胶,是出于预算和制造的考虑。如果将Rhex与塑胶匹配,则会使腿尖变得过于脆弱(因为在攀爬过程中,通常只有少数几条腿能够承受机器人的负荷)。这也意味着T-RHex不能像Rhex那样在腿部建立“能量储存”。不过,就机动性而言,T-Rhex可能更受电机速度的限制。

(RHex机器人)
IEEESpectrum:你们是如何设计攀爬步态的?为什么不使用中间的腿,为什么需要一个尾部?
CatherinePavlov:步态设计包括大量的手调和试错。我们想要实现一种左右对称的步态,以实现更多脊柱之间的负载分配,并防止腿部的平面外扭曲。当使用所有三对腿时,必须具有非常精确的角度定位或者一对腿被推离墙壁。两条腿能够保持完整的机器人步态,如果使用中间的腿,那么中间的腿受损的程度会比它能发挥的作用要大,中间的腿有时也会把后面的腿从墙上推下来。
在静态测试中,我们看到机器人在大约35度的倾斜角度下会脱离前腿,向后倾斜。为了防止机器人向后倾斜并“坐”在墙上,因此需要一个尾部。尾部允许我们加载前腿,即使它们与表面成一个小角度。我们设计的攀爬步态是利用尾部让后腿充分循环,而机器人不会向后倾斜。
IEEESpectrum:是什么阻碍了T-Rhex攀爬更陡峭的表面?
CatherinePavlov:有一些限制因素。一是腿的尖部很容易断裂。我认为我们还需要一个更轻的平台来实现完全垂直,我们将在未来的工作中考虑使用更小的尺寸。我们也不认为我们的步态是最好的,我们可以通过更多调整获得边际改进。
IEEESpectrum:RHex脚上的结构能辅助它进行更动态的移动吗?
CatherinePavlov:动态攀爬动作?我认为只有在表面粘附力很好和表面强度很好的表面上才有可能,但理论上是有可能的。不过,如果想让它跳墙的话,现在肯定不行。
IEEESpectrum:下一步你们会做什么?
CatherinePavlov:我们的主要目标是探索腿部制造材料的空间,比如玻璃纤维、聚乳酸、聚氨酯,也许还有金属玻璃。我们认为在腿部材料和几何结构方面有很大的改进空间。更长远的改进将是增加传感器,例如用于墙壁检测,可靠的地板到墙壁转换以及动态步态转换。
END
加入社群
机器人大讲堂Rob社群开始招募啦!如果您正在从事或想要从事机器人行业、想要学习这一方向,都欢迎您加入我们共同探讨机器人前沿科技。
另外,腿足机器人、医疗机器人、工业机器人专业讨论群正在招募中,欢迎各位专业领域的小伙伴加入。
在机器人大讲堂公众号对话框回复“交流群”获取入群方式!
招募作者
机器人大讲堂正在招募兼职内容创作者和专栏作家
请将简历和原创作品投至邮箱:LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎有兴趣有能力的朋友加入!


看累了吗?戳一下“在看”支持我们吧!





