ICCV 2019 | 精确的端到端弱监督目标检测网络
点击上方“CVer”,选择加"星标"或“置顶”
重磅干货,第一时间送达

本文转载自:AI科技评论
作者 | bbuf 编辑 | 唐里
论文发于:ICCV 2019 论文标题:Towards Precise End-to-end Weakly Supervised Object DetectionNetwork 论文地址:https://arxiv.org/abs/1911.12148
1. 研究背景
2. 相关工作
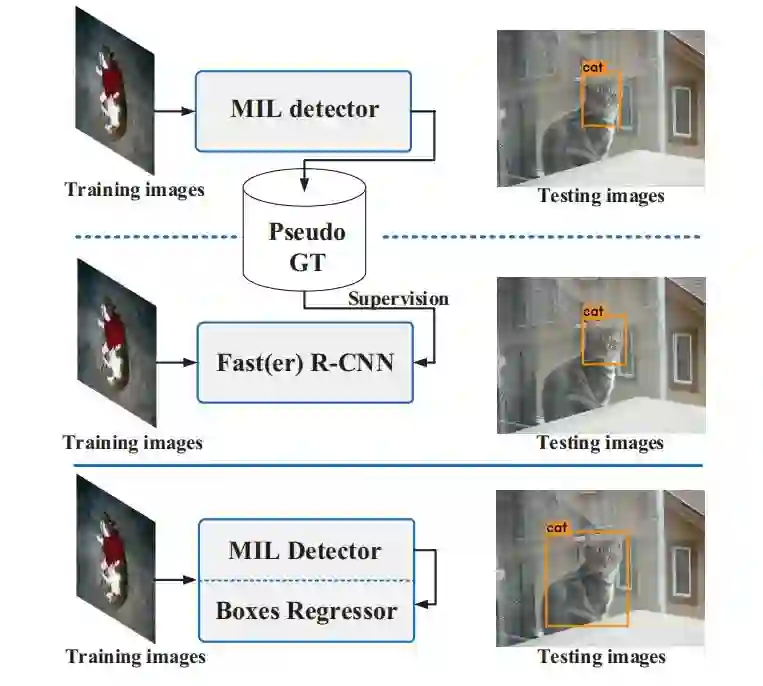
3. 方法

3.1 引导注意力模块
 ,注意力模块将其作为输入,然后通过一个1*1卷积层输出一个空间归一化的注意力权重图
,注意力模块将其作为输入,然后通过一个1*1卷积层输出一个空间归一化的注意力权重图
 ,然后将注意力权重图和相乘获得
,然后将注意力权重图和相乘获得
 。然后
。然后
 被加到
被加到
 上获得增强后的特征图
上获得增强后的特征图
 。然后被送入后续模块中。注意力权重图
。然后被送入后续模块中。注意力权重图
 类似于空间归一化以增强相关区域并抑制不相关区域。
类似于空间归一化以增强相关区域并抑制不相关区域。
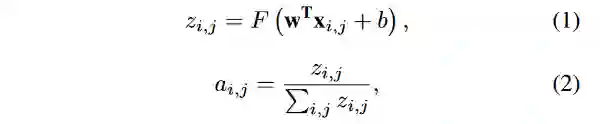
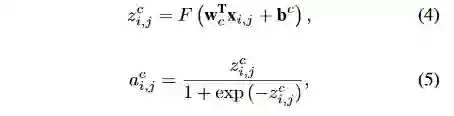
 是非线性函数,
是非线性函数,
 是注意力模块的1*1卷积的参数。增强后的特征图可以用下面的公式计算:
是注意力模块的1*1卷积的参数。增强后的特征图可以用下面的公式计算:

 变成
变成
 。公式可以重写为:
。公式可以重写为:

3.2 MIL分支
 ,其中标签表示为:
,其中标签表示为:
 ,
,
 代表类别为c的目标是否出现了。对于输入图像,建议框集合
代表类别为c的目标是否出现了。对于输入图像,建议框集合
 是Selective Search方法产生的。
是Selective Search方法产生的。
 。其中
。其中
 代表建议框的总数,
代表建议框的总数,
 代表图像的类别总数。这两个矩阵通过尺寸不同的soft-max层传递,输出是形状相同的两个矩阵:
代表图像的类别总数。这两个矩阵通过尺寸不同的soft-max层传递,输出是形状相同的两个矩阵:
 。
。
 。
。

3.3 多任务分支
 ,总共有
,总共有
 个类别是在全连接后面接soft-max层计算而来。
个类别是在全连接后面接soft-max层计算而来。
 ,这里的c表示某个类别。由于从3.2节介绍的MIL分支获得了实例标注,因此现在每个ROI都有一个GT边界标注框。使用所有标注的ROI进行多任务分类和回归,损失如下:
,这里的c表示某个类别。由于从3.2节介绍的MIL分支获得了实例标注,因此现在每个ROI都有一个GT边界标注框。使用所有标注的ROI进行多任务分类和回归,损失如下:

 分类损失,
分类损失,
 是回归损失。
是回归损失。
 控制两个损失的平衡,对于
控制两个损失的平衡,对于
 ,使用Smooth L1损失,对于
,使用Smooth L1损失,对于
 ,因为伪标注信息带有噪声,所以我们为每一个ROI增加一个权重系数,公式如下:
,因为伪标注信息带有噪声,所以我们为每一个ROI增加一个权重系数,公式如下:

 是建议框的个数,权重
是建议框的个数,权重
 是精细化分类器时使用特定方式计算的。因此整个网络的损失函数可以用下式表示:
是精细化分类器时使用特定方式计算的。因此整个网络的损失函数可以用下式表示:

 是GAM的多标签分类损失,
是GAM的多标签分类损失,
 是WSDDN的多标签分类损失,
是WSDDN的多标签分类损失,
 是精细化分类器的损失,
是精细化分类器的损失,
 是检测分支的损失。
是检测分支的损失。
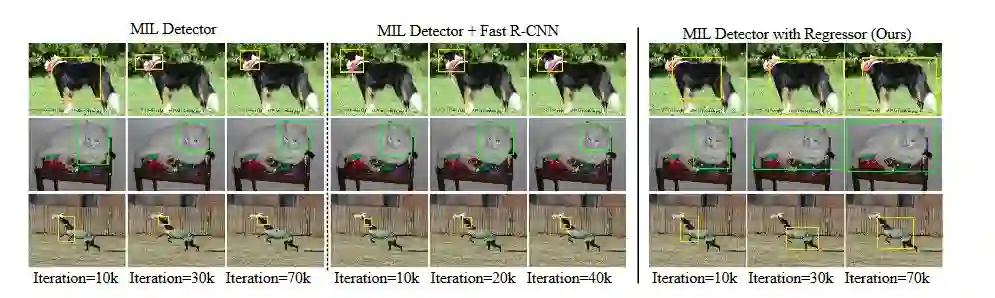
4. 实验


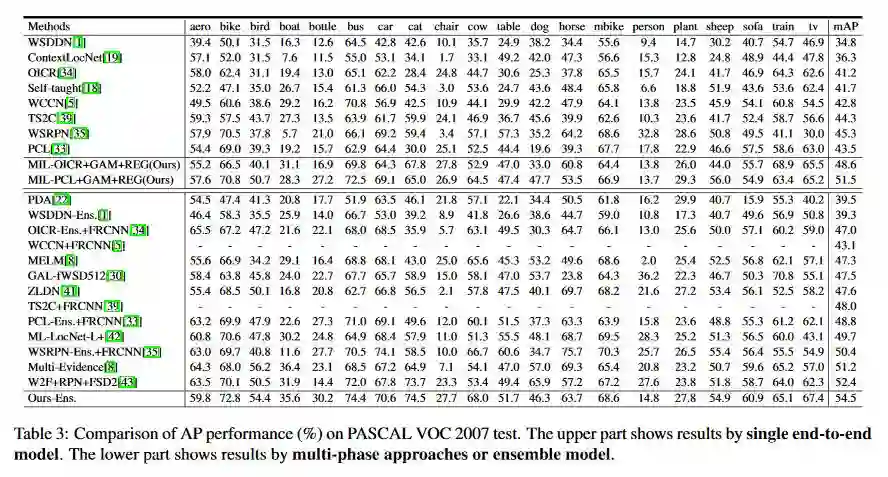
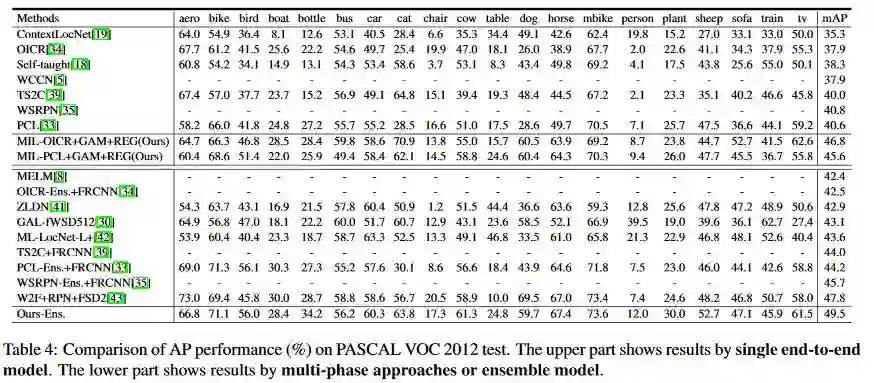
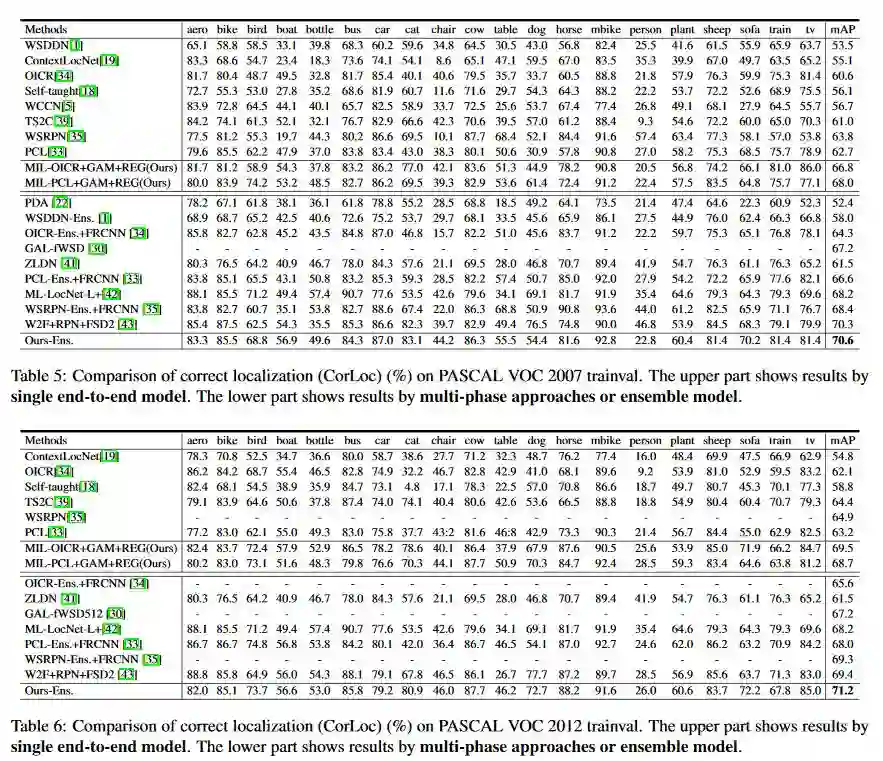
5. 对比和结论
重磅!CVer-目标检测交流群已成立
扫码可添加CVer助手,可申请加入CVer-目标检测交流群,同时可申请加入CVer大群和细分方向群,细分方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索等群。
一定要备注:研究方向+地点+学校/公司+昵称(如目标检测+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群

▲长按加群

▲长按关注我们
麻烦给我一个在看!
登录查看更多
相关内容




相关VIP内容
相关资讯
相关论文