GTA 5真香!哦不,我在用深度学习做自动驾驶
点击上方“CVer”,选择加"星标"或“置顶”
重磅干货,第一时间送达

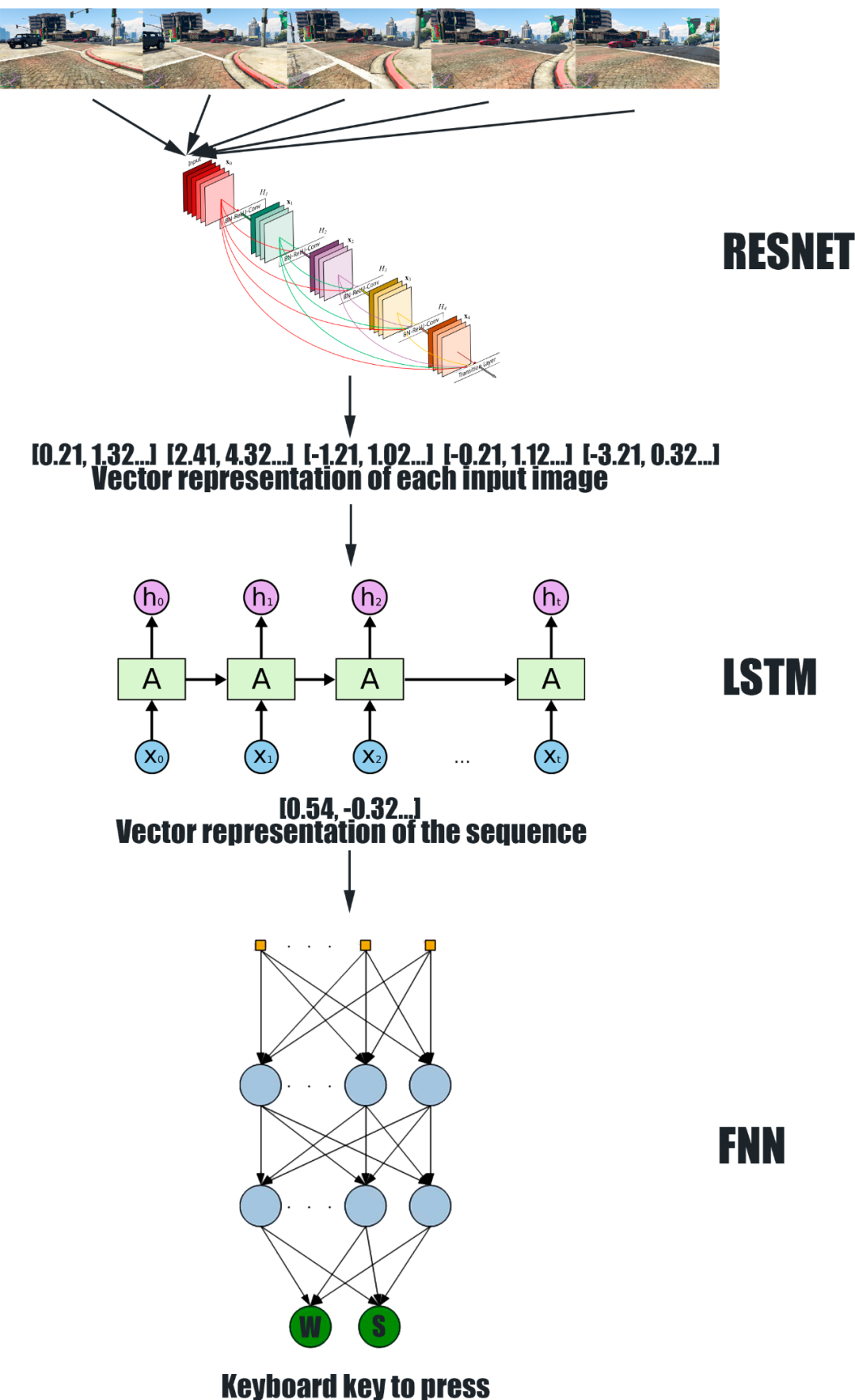
用深度学习当「外挂」,本文将教你如何用 PyTorch 在GTA 5 中训练自动驾驶模型。

这技术,比玩家都稳?


Pytorch
Torchvision
Nvidia Apex (only for FP16 training)
numpy
cupy (optional but highly recommended especially for training the model, 10x speed up in data preprocessing comparated with numpy)
cv2 (opencv-python)
glob
h5py
json
win32api (PythonWin) - Should be installed by default in newest Python versions (Python 3.7 reccomended)
python generate_data.py --save_dir tedd1007\training_data
python train.py --train_new
--train_dir tedd1007\training_data\train
--dev_dir tedd1007\training_data\dev
--test_dir tedd1007\training_data\test
--output_dir tedd1007\models
--batch_size 10
--num_epochs 5
--fp16
python train.py --continue_training
--train_dir tedd1007\training_data\train
--dev_dir tedd1007\training_data\dev
--test_dir tedd1007\training_data\test
--output_dir tedd1007\models
--batch_size 10
--num_epochs 5
--checkpoint_path tedd1007\checkpoint\epoch1checkpoint.pt
python run_TEDD1104.py --model_dir D:\GTAV-AI\models --show_current_control --fp16
GTA 5 里的载具手感和极品飞车等游戏有所不同,对于手残的我们来说撞墙在所难免。自从学习了人工智能,一切看来变得有了希望。
重磅!CVer-论文写作与投稿 交流群已成立
扫码添加CVer助手,可申请加入CVer-论文写作与投稿 微信交流群,目前已满1250+人,旨在交流顶会(CVPR/ICCV/ECCV/ICML/ICLR/AAAI等)、顶刊(IJCV/TPAMI/TIP等)、SCI、EI等写作与投稿事宜。
同时也可申请加入CVer大群和细分方向技术群,细分方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch和TensorFlow等群。
一定要备注:研究方向+地点+学校/公司+昵称(如论文写作+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群

▲长按加微信群

▲长按关注CVer公众号
麻烦给我一个在看!
登录查看更多
相关内容

Arxiv
5+阅读 · 2018年2月22日




相关VIP内容
相关资讯
相关论文
Arxiv
5+阅读 · 2018年2月22日