【分享】平行驾驶:交通自动化与汽车智能化统一融合框架
Parallel Driving in CPSS:
A Unified Approach for Transport Automation and Vehicle Intelligence
Fei-Yue Wang, Fellow, IEEE, Nan-Ning Zheng, Fellow, IEEE, Dongpu Cao,
Clara Marina Martinez, Li Li, Fellow, IEEE, and Teng Liu
文章导读
智能网联汽车的迅速发展为当前的车辆控制和交通系统提出严峻的挑战。本文提出智能网联汽车的一种全新的基于云端化的信息物理社会系统(CPSS)解决方案,平行驾驶。
本文首先介绍CPSS定义和基于人工社会(Artificial societies)、计算实验(Computational experiments)和平行执行(Parallel execution)智能机器系统。随后,提出了基于CPSS的平行驾驶框架,融合物理世界、精神世界和人工世界,并详细论述了平行测试、平行学习以及平行增强学习等方法,它们在智能网联汽车的感知、决策与规划和控制等关键模块中都有巨大的应用潜力。
受到平行系统思想的启发,在智能视界及其应用实例的基础上,本文提出了平行视界的概念。平行驾驶旨在为涵盖不同自动化层级的智能网联汽车系统和未来智能交通提供一套智能融合解决方案及框架。
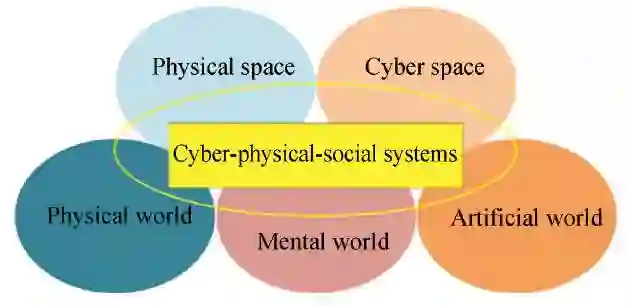
图1 CPSS的定义以及信息、物理和社会系统之间的相互联系
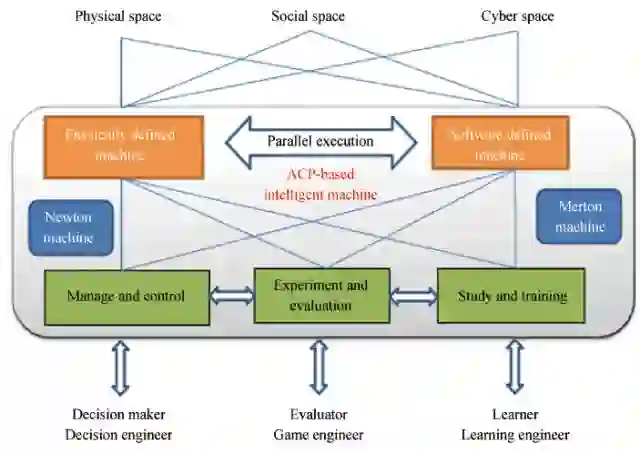
图2 基于ACP方法的智能机器系统框架. A:人工社会,C:计算实验,P:平行执行
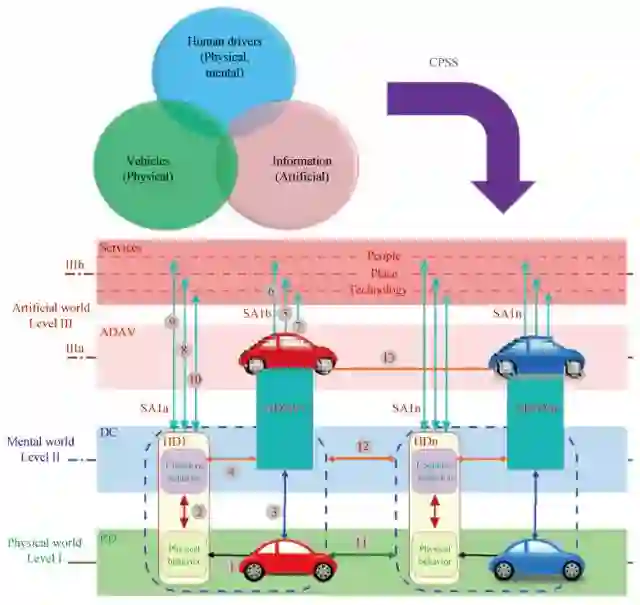
图3 基于CPSS的平行驾驶框架. RD:实际驾驶,DC:驾驶员识别,CPSS包含三大组成部分:人(社会维度),位置信息(地理维度)和技术(传感器、物联网等). HD:人类驾驶员,RV:实际车辆,ADAV:人工驾驶员和人工车辆,SA:态势感知
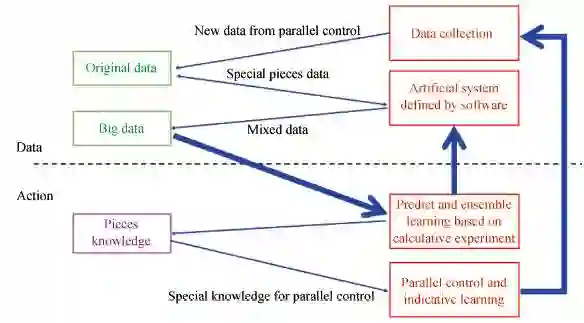
图4 平行学习框架,主要包含数据处理和行动学习两大阶段
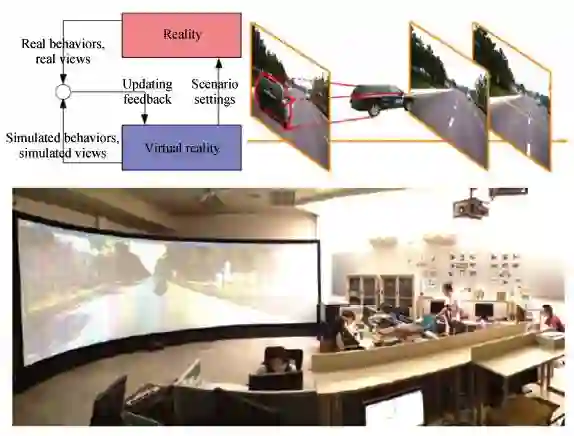
图5 平行测试的实现过程和一个实例
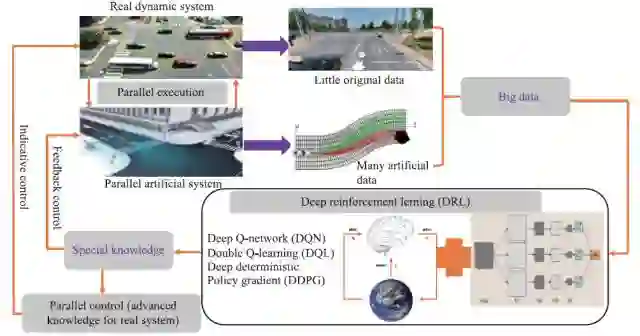
图6 平行增强学习理论框架. 主要包括数据收集及生成过程、数据处理及最优策略的计算过程、特定知识的应用过程
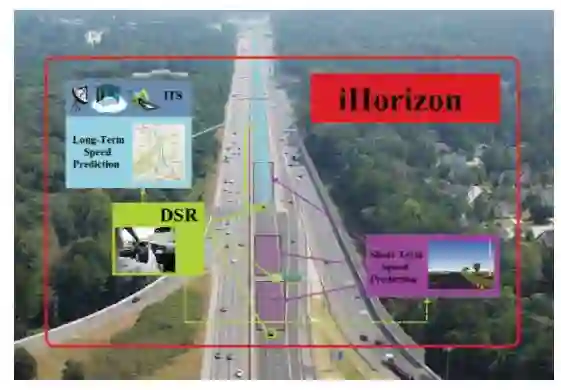
图7 平行视界框架,主要包括三大模块:1)驾驶风格识别模块,2)短期速度预测模块,3)基于周期视界的长期速度预测模块
文章信息
F.-Y. Wang, N.-N. Zheng, D. P. Cao, C. M. Martinez, L. Li, T. Liu, “Parallel driving in CPSS: a unified approach for transport automation
and vehicle intelligence”, IEEE/CAA Journal of Automatica Sinica, vol. 4, no. 4, pp.577-587, Oct. 2017.
长按识别以上二维码,或点击文末“原文链接”,可阅读全文。


