【特约稿件】俞建成:基于事件相关电位的水下机械手脑电波控制

中国科学院沈阳自动化研究所机器人学国家重点实验室, 辽宁沈阳 110016;
中国科学院大学, 北京 100049
关键词: 水下机械手,复杂任务,事件相关电位(ERP),脑-机接口(BCI),信息传输率(ITR)
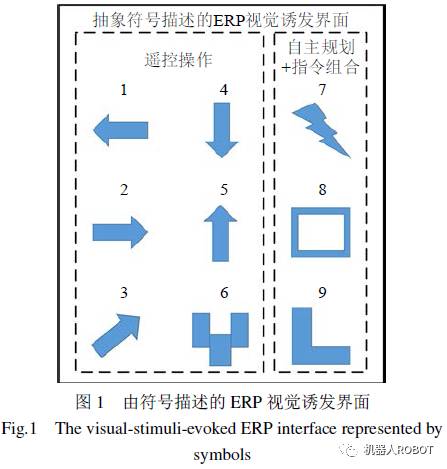
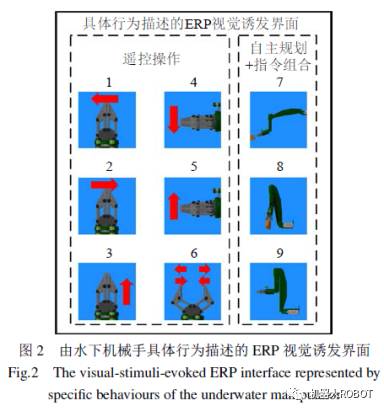
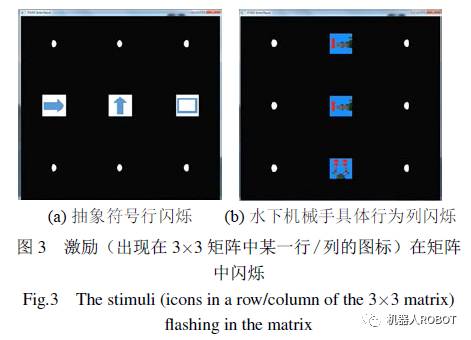
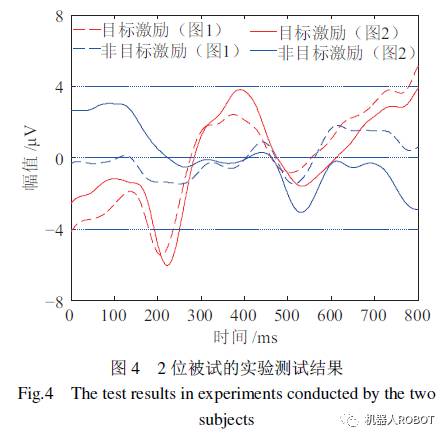
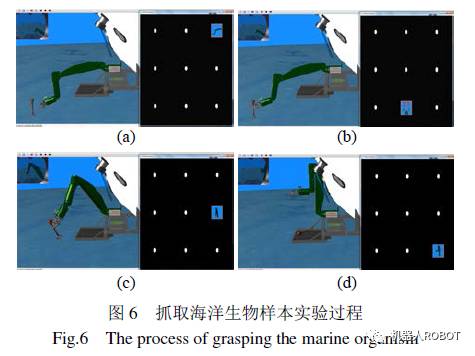
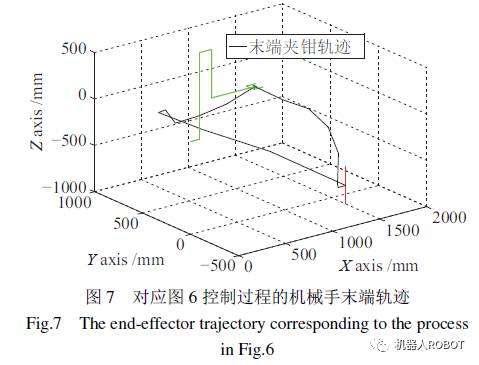
摘要:为了解放水下机械手操作人员的双手,本文将脑-机接口(BCI)技术应用到水下机器人作业中,通过解析脑电信号并将其映射为具体指令从而控制机械手.现有的脑电波控制机械手方法在实时性、准确性方面无法满足实际的水下作业要求,提出了基于视觉诱发模式的ERP(事件相关电位)脑电信号来控制水下机械手的策略.通过融合脑电波控制与水下机械手作业的各自特点和优化ERP视觉诱发界面,使操作人员能够快速地完成给定任务.8位被试被邀请在建立的实验平台上进行控制实验,最终得到的辨识操作人员意图平均准确率、系统信息传输率与完成任务平均控制时间分别为91.5%、27.7bits/min与90.1s.与同类系统相比,本文所提控制策略系统性能更好,且作业效率满足实际作业要求.
来源:机器人ROBOT

登录查看更多
相关内容
Arxiv
3+阅读 · 2018年7月5日
Arxiv
3+阅读 · 2018年5月30日
相关主题




相关VIP内容
相关资讯