设计是机器人智能之本,上海交通大学高峰教授分析步行机器人的设计与控制
“2019中国机器人行业年会”将于2019年1月9-10日在北京举办,岁末年初行业江湖聚首,特邀百位行业顶尖专家、企业家和投资人嘉宾,重温总结2018中国机器人产业历程,规划展望2019中国机器人行业发展,推进机器人产业创新与协作共融。快来报名共同见证!点击或扫描下方二维码了解详情并报名参与,感谢您的支持!


导读
2018年10月27日,上海交通大学高峰教授做客机器人大讲堂,发表了主题为《设计是机器人行为智能之本》的主题演讲。高峰教授是国家973计划的首席科学家,以及国家杰出青年基金获得者,曾获发明专利110项,发表SCI论文112篇,出版3部中英文专著。主要研究方向为并联与步行机器人的设计与控制。
整理编辑:溪岚
高峰教授就步行机器人的机构、部件、控制及应用展望等方面进行了介绍,现将高峰教授的报告整理如下:
机器人的构成
机器人的构成分为几个部分:
一是机构:机构是人类发明的一种表达机械系统功能和性能特征的工程师语言。机构是构件和运动副的组合体。大自然创造的动物和人类发明的机器都遵行机械原理。机构是机器人设计与发明的核心。
二是基础部件:机器人的基础部件有两部分,感知部件(力、位移、视觉、陀螺等传感器);驱动部件(电机、减速器、驱动与控制器等)。基础部件体现机器人开发的核心竞争力。
三是控制:机器人的控制体现在机器人的底层控制技术、通讯技术、智能控制技术等方面。
机器人的机构设计
机构学是人类社会进步中很重要的发现,不光是机器人,所有能动的设备都是机构。机构运动输出有两种形式,一种是移动,一种是转动。移动是线性叠加,而转动是非线性的,与顺序有关。
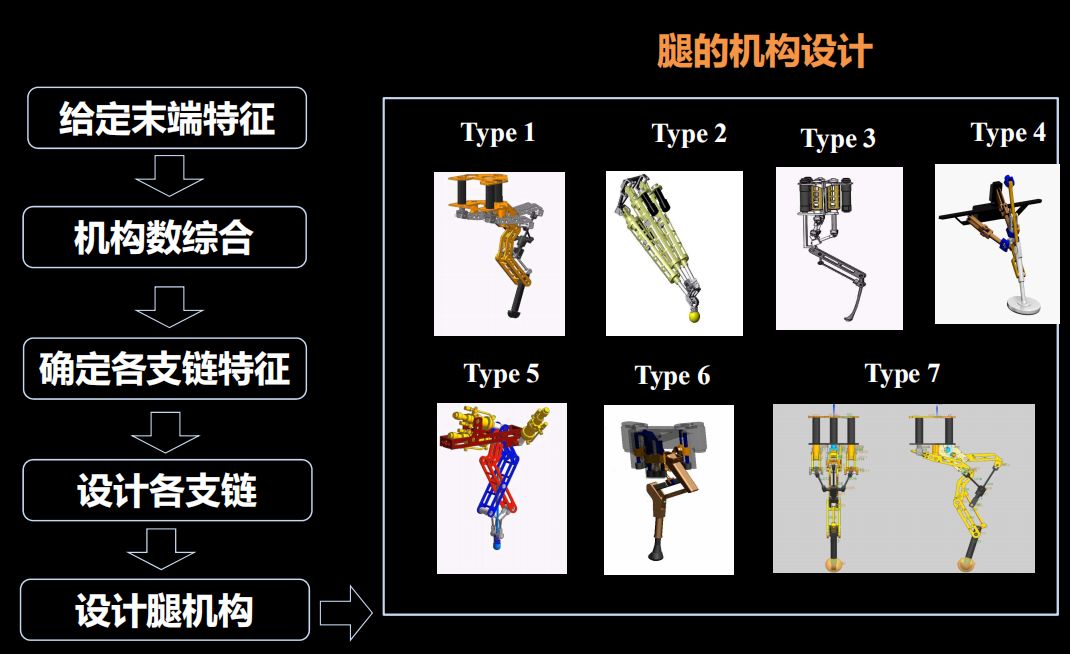
先看看机构设计。比如一个机器人的腿,可以把并联或混联引进来。串联腿的机构形式少,电机安装在腿的关节处。但是并联、混联腿的机构有很多种形式。有了腿就可以综合和发明出各种各样的步行机器人机构,如各向同性六足机器人,往哪个方向走性能相同;仿昆虫六足和仿螃蟹横向行走机器人;移动制造机器人,适于高铁的车厢、轮船、飞机等大构件单件产品现场制造与装配等。
另外,可以设计出少自由度步行机器人,它每个腿上只有两个电机驱动,但是带一个腰,身体末端输出运动变成四维机构,只有13只电机,这样成本能降低很多。

机器人的基础部件
再讲讲基础部件。这是大家非常感兴趣,也是中国机器人产品开发的瓶颈。
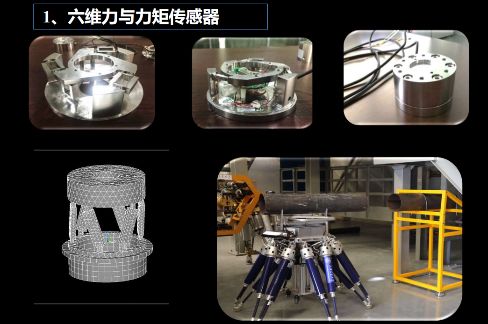
第一个是六维力传感器,1995年、1997年在加拿大我就开始研究,98年获得863计划项目支持。我们提出用并联机构设计六维力传感器力敏元件,开发的六维力传感器,小的是手指头尖那么大,直径和高都是20毫米,六维力传感器已经成系列化商品。现在把传感器的信号处理全部放进去,出来的是数字信号,还可以无线通讯链接,所以对于服务机器人和打磨抛光、装配等机器人来说是很有用的感知部件。
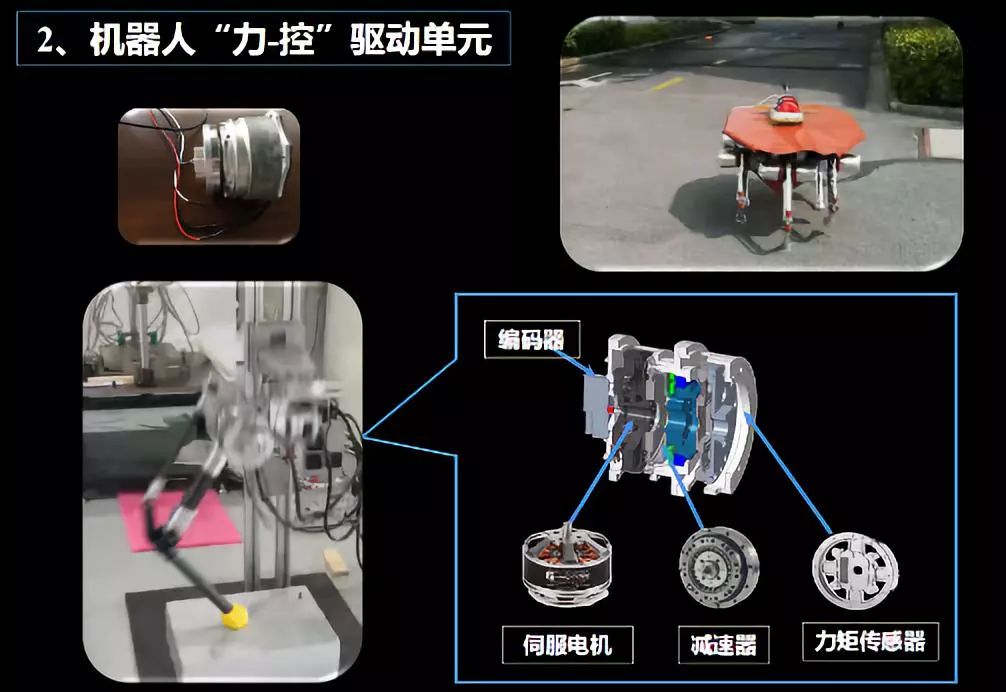
另外,力-控单元是智能机器人的关键部件,把力、位置、减速器、伺服电机放在一起就是一个控制单元。工业机器人把这个单元一装上就能感知外部的力。我们把力矩传感器、编码器、谐波和国产电机做成一个复合单元,很轻,1.2公斤,一条腿要用3个,整个腿是4.5公斤。由于轻了,它机器人承载之中比高,力大体轻就能跳起来,但是落下来很危险,会破坏腿里的部件,所以要有力控。一个重要的问题是如何判断接触的刚度和阻尼,如果能够在线辨识,就能实现实时控制。

我一直有一个理想,我们的工业机器人能不能不用电机和减速器做驱动,也不要伺服阀,用机液耦合驱动器。工作原理是用液压放大电机功率,我们不用l伺服阀,用高压油进来以后电机直接控制螺旋阀芯。传统液压系统是电液耦合原理,该驱动器是机液耦合,好处是抗污染能力强,不用过滤,因为开口很大,都是毫米级的,开环精度也很高,能达到0.1毫米,不需要闭环。不像伺服阀是微米级的开口,易堵塞失效。
步行机器人的控制
下面重点讲一讲控制。步行机器人必须具有智能方能应用,其控制十分复杂的,比如六足步行器要18个电机,四足的也要16个电机,这无疑增加了控制复杂度。打个比方,人的手指头每一节是一个电机,一个手指头要4个电机,一只手臂加起来就是27个电机驱动。人为什么大脑发达?就是因为大脑用90%以上资源控制十个手指头,非常复杂。比如我拿一支笔,是用几个手指头拿?如果用两个,那么是哪两个?如果用三个或以上,排列就更多了。
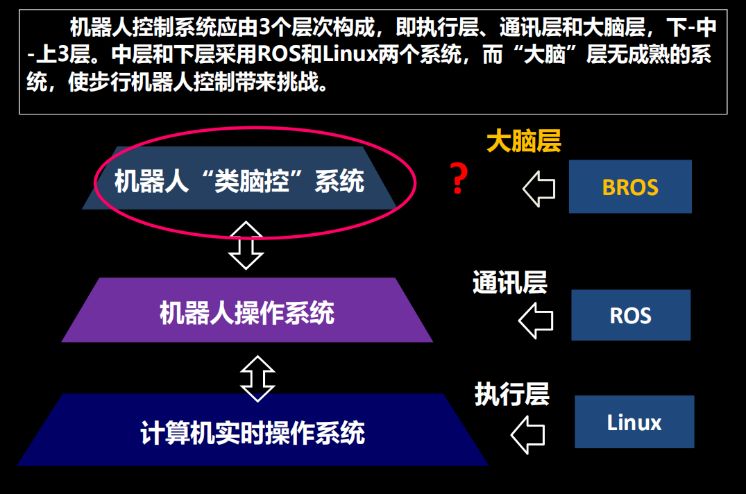
这个例子就说明行为智能控制非常复杂,所以我们还要通过类脑控制系统来做这个事。大家都熟悉的Linux系统是实时的计算机系统,是机器人驱动底层软件平台,而ROS系统就是机器人操作系统的非实时通讯的平台,这两个软件是免费开放的。还有机器人类脑控制系统,即BROS系统,这个系统非常重要,如果足式机器人没有BROS系统实际是不能用的,所以今天足式机器人不能用的原因就是没有这个系统。
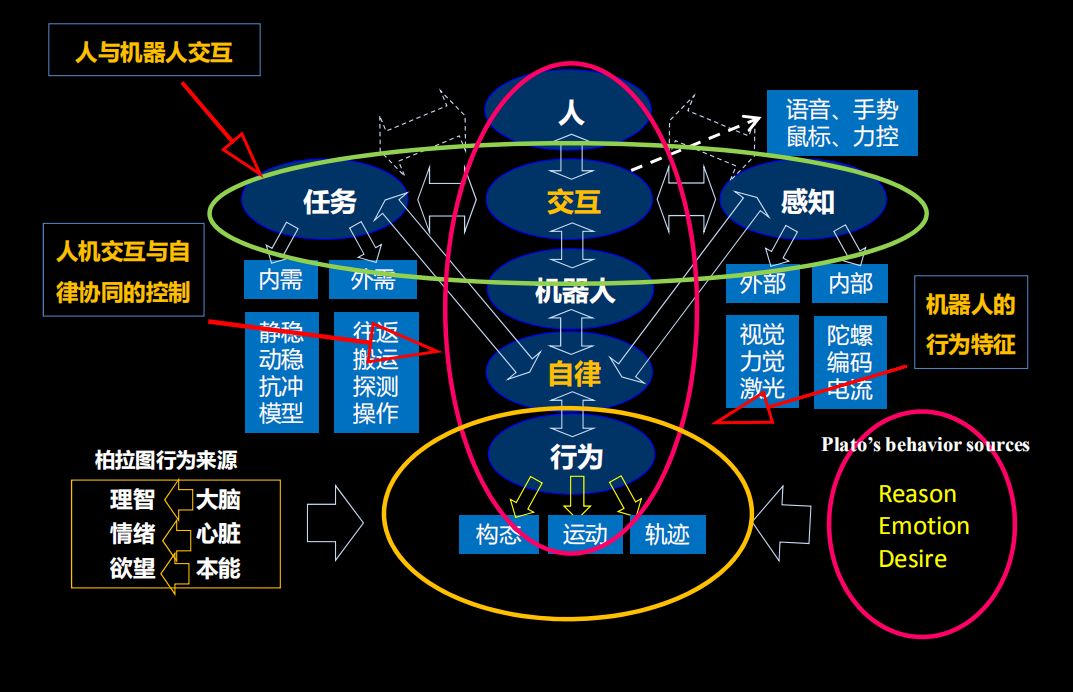
最近有一篇文章发表在国际机器人IJRR杂志上,总结美国国防部举行的DARPA救灾机器人挑战赛经验,认为步行机器人应该是人机交互和自律协同的控制模式。机器人没有需求,人有需求,机器人理解人的需求是很难的,就需要机器人通过人机交互的模式把信息传回去,比如用力反馈、用视觉、用语音告诉人,人再进行决策,再通过人机交互和网络告诉机器人,机器人收到信息以后自主完成。
研究机器人的行为需要模拟人。人的行为由躯体和灵魂构成,躯体是头、上身和下身,灵魂则分为性格和知识是两个方面,性格有欲望、情感、智力、体能,机器人能不能蹦起来就是体能。知识又有文化、意识、习俗、技艺等等。我的目的是想设计机器人的灵魂。
构建机器人拟人的行为系统是我们的长期任务。比如交互行为,扔一个凳子,机器人是有反应的,它觉得不安全它会跑。再比如跟踪人,走到哪儿跟到哪儿。最后是创新,机器人怎么设计机器人,这是最高层的,今天还做不到,但是制造行为是有的。这就是人机交互系统。
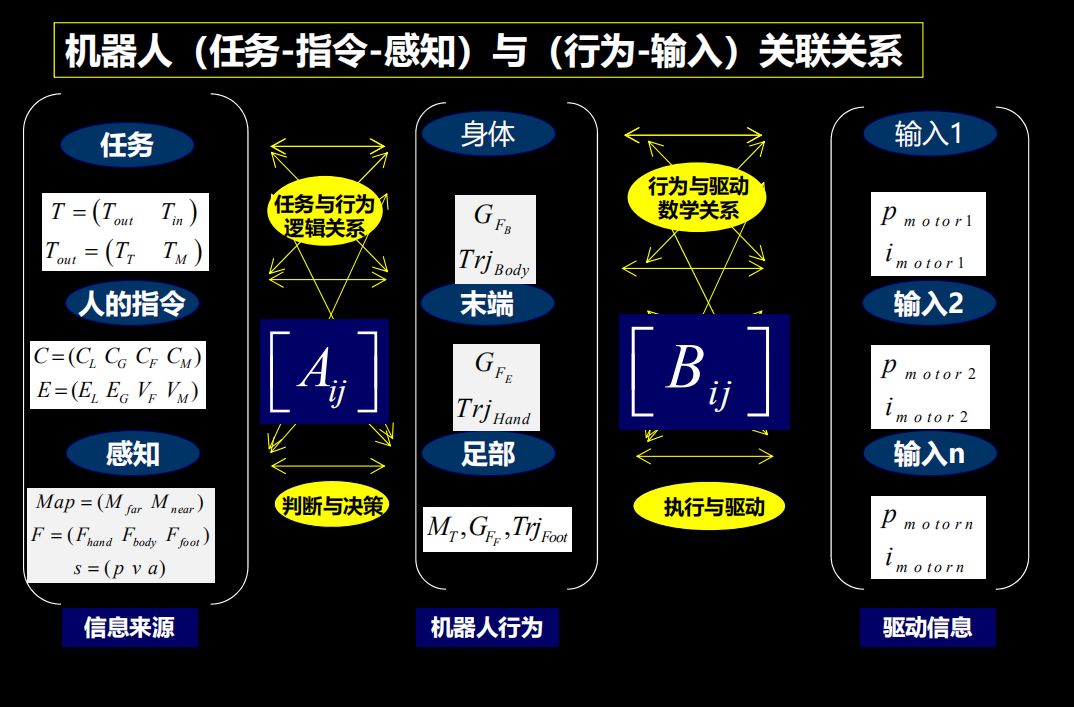
机器人行为分为构态、运动、轨迹特征。人机交互和机器人行为之间如何建立联系?我们叫人机交互与自律协同的智能控制。比如说任务来源,任务来源分外需和内需,外需就是人的需求,比如人要开门,就告诉机器人开门。但是内需很复杂,内需是机器人自己要有安全感,机器人的安全与速度有关,稳定感、饥饿感等。
任务和感知信息与机器人行为之间怎么建立联系,可以通过逻辑,用集合的方法来做。比如开门,用哪只手开,都是可以做逻辑判断的。也可以通过深度学习的方式做,从上到下,什么模型都不要,能做出来就好。但还可以通过建模的方式,建参数化模型,做出来以后轨迹末端和身体行为就都有了。
步行机器人的应用
应用主要有五个方面:
一是智能制造,主要是单件生产的系统。步行机器人的智能制造主要用于高铁、飞机、火箭、轮船、核电站、化工厂。机器人的腿要承载大、钢度好,要可以承载500多斤。还要粗精运动控制,前面加个并联头,提高机器人精度。还要有视觉避障系统,找到自己要去的地方,视觉要有标识或者有总的坐标系系统。
二是人机协作装配作业,多应用于核电站和船舶上。比如力学插孔,特别适合在高铁底下往上做,因为人一旦仰头做事是很难的,可以直接用力学机器人去操作。还可以做一些测量,用力学测量孔的轴心在哪里。
三是危险环境服役。例如太空任务,原来在月球着陆以后着陆器不能走,现在国家希望着陆行走一体化,而且是软着陆,即使在月球深坑也能起飞。飞行器也希望带腿,空军找到我们,说把无人机都加上腿,并且腿是能收回来的。将来飞机飞走了,腿还可以留在那儿,再加上太阳能还可以充电。
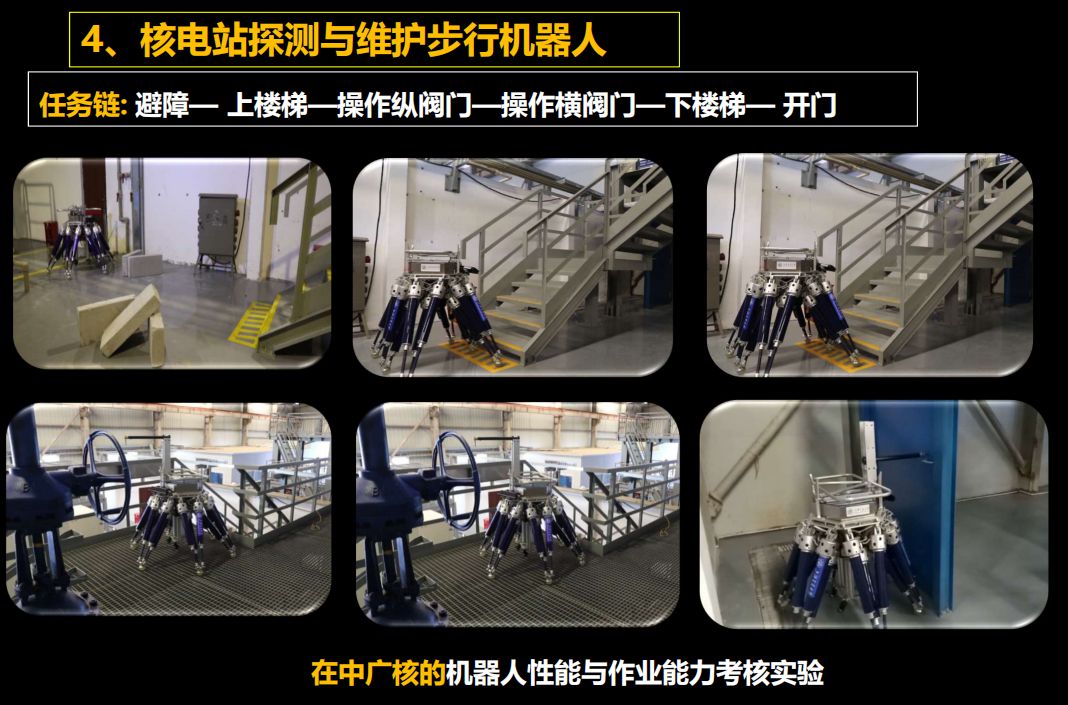
四是核电站探测与维护。起因是日本福岛核泄漏事件,我们写了一个报告,主要解决三个问题,一是现场探查,二是作业,三是重载清障。这个实验是全智能的过程,一是自主避障,二是踏障,三是上楼梯,四是下楼梯。
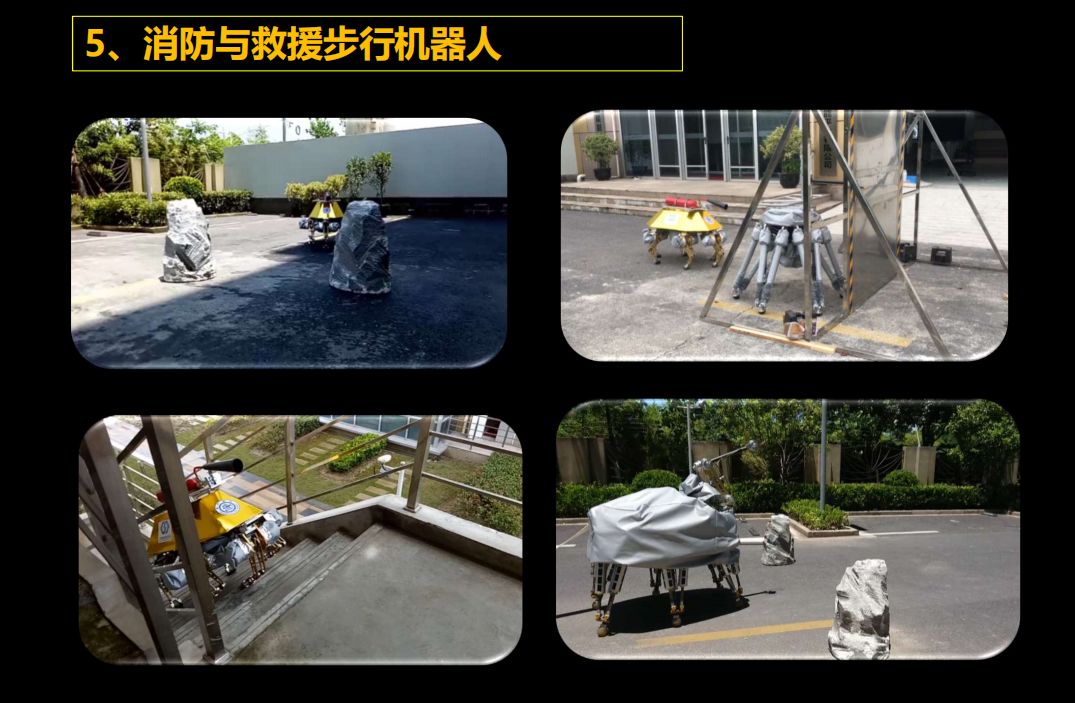
五是消防与救援。图中是消防机器人,可以做协作,有大的是喷水的,有小的自带灭火器。右上角是两个机器人协作,一个开门,一个灭火。机器人可以通过视觉找到火源,自觉灭火,我很看好这款机器人在安保救援方面的应用。采用一些防火材料,可以趟火过去,让机器人先进去,把一些化工厂的阀门关上,也是一种很好的做法。
步行机器人在安保、核电救灾、制造、装配、建筑等方面都可以进行应用,外空探测、航空航天,娱乐也是一个很好的行业,大家喜欢玩,可以玩载人,可以玩斗牛士等等。所以,未来市场需要大家创造。谢谢大家!
加入社群
机器人大讲堂Rob社群开始招募啦!如果您正在从事或想要从事机器人行业、想要学习这一方向,都欢迎您加入我们共同探讨机器人前沿科技。
另外,腿足机器人、医疗机器人、工业机器人专业讨论群正在招募中,欢迎各位专业领域的小伙伴加入。
在机器人大讲堂公众号对话框回复“交流群”获取入群方式!
招募作者
机器人大讲堂正在招募兼职内容创作者和专栏作家
请将简历和原创作品投至邮箱:LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎有兴趣有能力的朋友加入!
END






