近期必读的五篇 NeurIPS 2020【三维点云分析】相关论文和代码
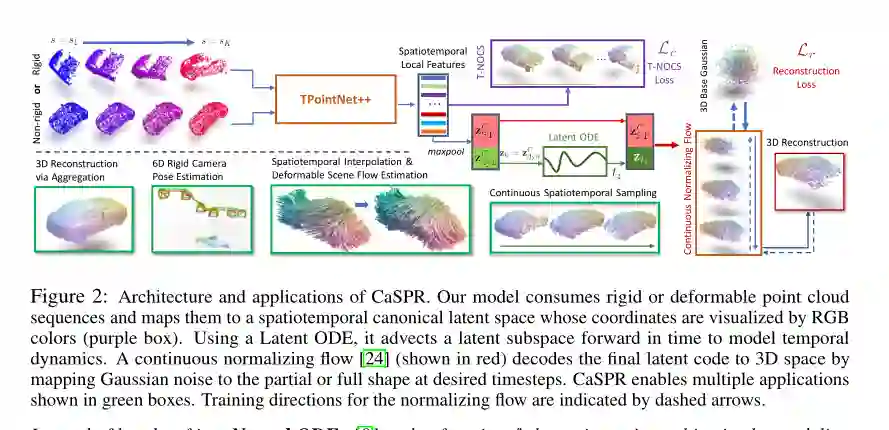
1. CaSPR: Learning Canonical Spatiotemporal Point Cloud Representations
作者:Davis Rempe, Tolga Birdal, Yongheng Zhao, Zan Gojcic, Srinath Sridhar, Leonidas J. Guibas
摘要:我们提出了CaSPR,这是一种学习以目标为中心的动态移动或演化的典型时空点云表示方法。我们处理的目标是随着时间进行信息聚合,并在过去的任何时空邻域中查询目标状态。与以前的工作不同,CaSPR支持时空连续性的学习表示,对可变和不规则的时空采样点云具有鲁棒性,并且能够泛化到对不可知的目标实例进行表示。我们的方法将问题分为两个子任务。首先,我们通过将输入点云序列映射到时空规范化的目标空间来显式编码时间信息。然后,我们利用这种规范化来学习使用神经常微分方程的时空潜在表示,以及使用标准连续化流(continuous normalizing flows)动态生成形状的生成模型。我们证明了我们的方法在几种应用中的有效性,包括形状重建,相机姿态估计,连续时空序列重建以及从不规则或间歇采样的观测值进行对应估计。
代码:
https://github.com/davrempe/caspr
网址:
https://proceedings.neurips.cc/paper/2020/hash/9de6d14fff9806d4bcd1ef555be766cd-Abstract.html
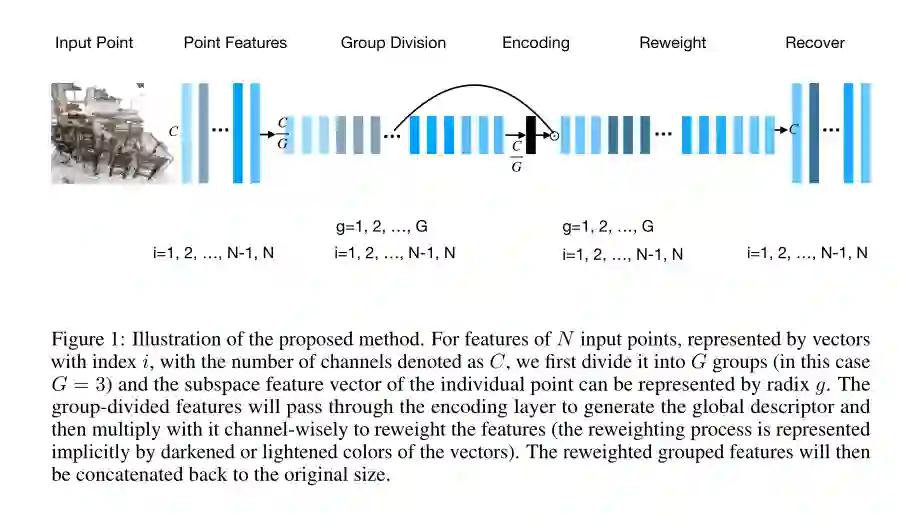
2. Group Contextual Encoding for 3D Point Clouds
作者:Xu Liu, Chengtao Li, Jian Wang, Jingbo Wang, Boxin Shi, Xiaodong He
摘要:全局上下文对于3D点云场景理解任务至关重要。在这项工作中,我们将最初为2D任务设计的上下文编码层扩展到3D点云方案。编码层在3D点云的特征空间中学习一组字典(code words)以表征全局语义上下文,然后基于这些字典,该方法学习全局上下文描述符以相应地对特征图进行加权。此外,与2D场景相比,数据稀疏性成为3D点云场景中的主要问题,并且随着字典数量的增加,上下文编码的性能迅速饱和。为了减轻这个问题,我们进一步提出了一种组上下文(group contextual)编码方法,该方法将通道划分为组,然后对组划分的特征向量执行编码。此方法有助于学习3D点云的分组子空间中的全局上下文。我们在三个被广泛研究的3D点云任务上评估了我们方法的有效性和可推广性。实验结果表明,当指标为mAP@0.25时所提出的方法在SUN-RGBD基准上mAP为3,性能明显优于VoteNet;而在ScanNet上,指标为mAP@0.5时其mAP为6.57 。与PointNet ++的基线相比,该方法的准确率为86%,优于基线的1.5%。
代码:
https://github.com/AsahiLiu/PointDetectron
网址:
https://proceedings.neurips.cc/paper/2020/hash/9b72e31dac81715466cd580a448cf823-Abstract.html
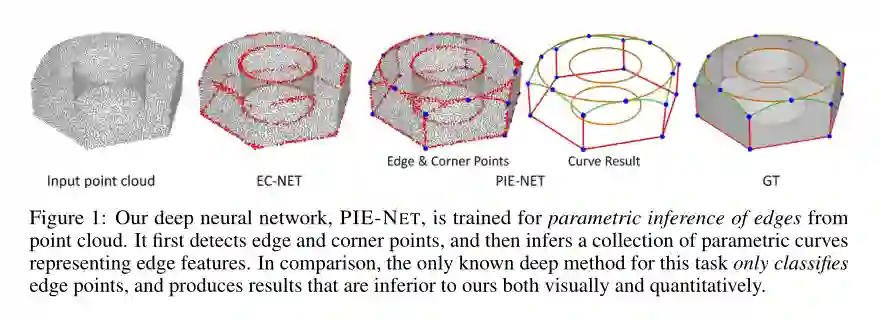
3. PIE-NET: Parametric Inference of Point Cloud Edges
作者:Xiaogang Wang, Yuelang Xu, Kai Xu, Andrea Tagliasacchi, Bin Zhou, Ali Mahdavi-Amiri, Hao Zhang
摘要:我们引入了一种端到端的可学习技术,能够可靠地识别3D点云数据中的特征边缘。我们将这些边缘表示为参数曲线(即线,圆和B样条曲线)的集合。因此,我们的深度神经网络(称为PIE-NET)经过训练可进行边的参数推断。该网络依赖于候选区域(region proposal)的体系结构,其中第一个模块先统计proposal边缘和拐角点的完整集合,第二个模块对每个proposal进行排名以决定是否应考虑。我们通过消融研究在ABC数据集(最大的CAD模型的公共可用数据集)上训练和评估我们的方法,并将我们的结果与传统(非学习)处理通道以及最近基于深度学习的边缘检测器(ECNet)所产生的结果进行比较。我们的结果在数量和质量上都大大超过了现有技术,并且很好地推广到了新颖的形状类别上。
网址:
https://proceedings.neurips.cc/paper/2020/hash/e94550c93cd70fe748e6982b3439ad3b-Abstract.html
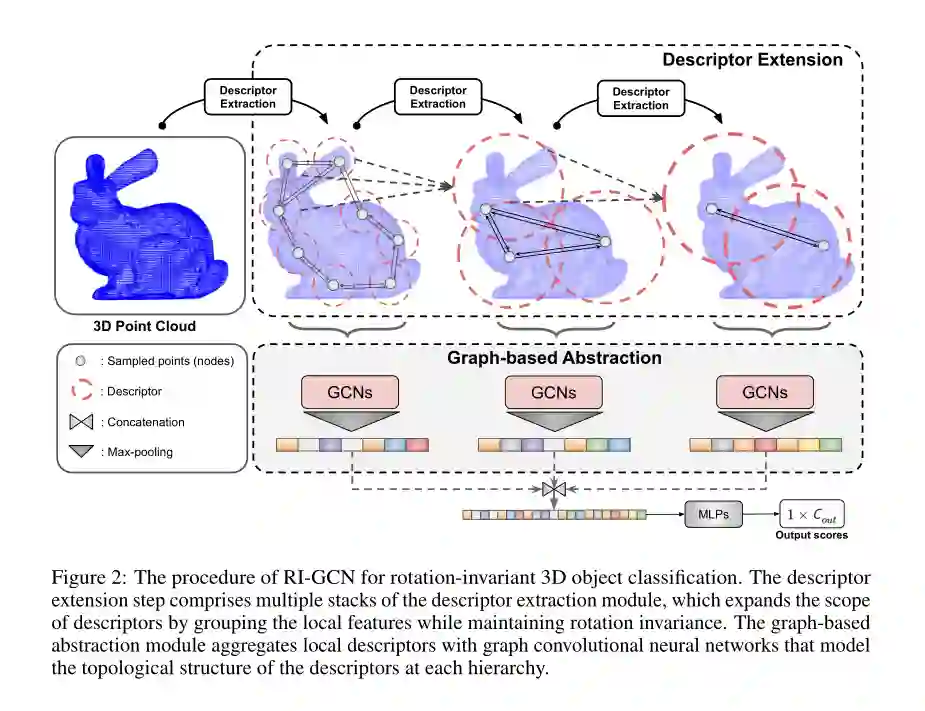
4. Rotation-Invariant Local-to-Global Representation Learning for 3D Point Cloud
作者:SEOHYUN KIM, JaeYoo Park, Bohyung Han
摘要:我们提出了一种用于3D点云数据的局部到全局表示学习算法,该算法适合于处理各种几何变换,尤其是旋转,而无需针对变换进行显式的数据增强。我们的模型利用了基于图卷积神经网络的多级抽象,它构建了一个描述符层次结构,以自下而上的方式对输入对象的旋转不变形状信息进行编码。每个级别的描述符都是通过3D点的随机采样从图神经网络中获得的,这对于使学习的表示形式对输入数据的变化具有鲁棒性是非常有效。我们提出的算法在旋转增强型3D对象识别和分割基准测试中展现了最新技术,并通过综合的ablative实验进一步分析了其特性。
代码:
https://cvlab.snu.ac.kr/research/rotation_invariant_l2g/
网址:
https://proceedings.neurips.cc/paper/2020/hash/5d0cb12f8c9ad6845110317afc6e2183-Abstract.html
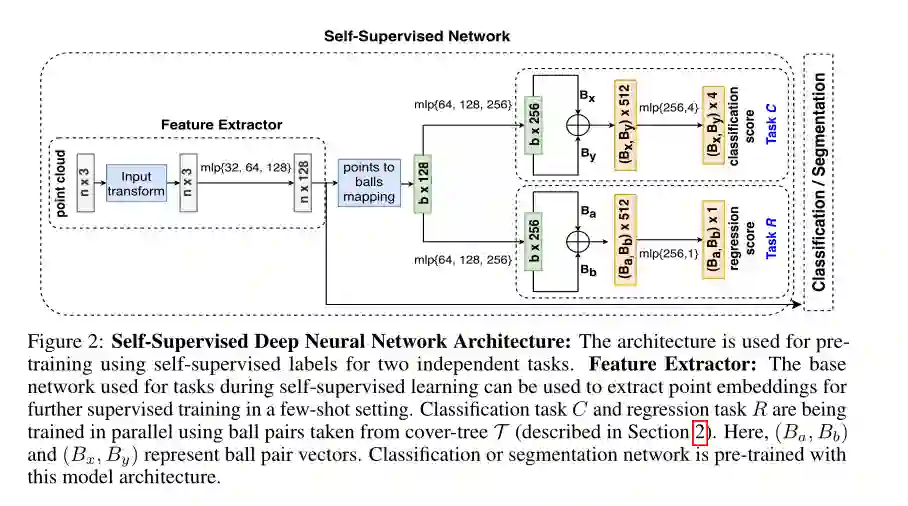
5. Self-Supervised Few-Shot Learning on Point Clouds
作者:Charu Sharma, Manohar Kaul
摘要:大规模点云的实用性不断提高,加上它们在机器人技术,形状合成和自动驾驶等广泛应用中的实用性,引起了业界和学术界的越来越多的关注。最近,在标记的点云上运行的深度神经网络已在有监督学习任务(如分类和分割)上显示出令人鼓舞的结果。然而,有监督学习导致对点云进行标注是一项非常繁琐的任务。为了解决这个问题,我们提出了两种新颖的自监督预训练任务,它们使用cover-tree对点云的分层分区进行编码,其中,点云子集位于cover-tree的每个层次的半径不同的球中。此外,我们的自监督学习网络仅限于在少样本学习(FSL)设置中用于训练下游网络的支持集合上进行预训练(包含稀缺的训练示例)。最后,将经过全面训练的自监督网络的点嵌入输入到下游任务的网络。我们针对下游分类和细分任务对我们的方法进行了全面的经验评估,结果表明,使用我们的自监督学习方法进行预训练的监督方法显着提高了最新方法的准确性。此外,我们的方法在下游分类任务中也优于以前的无监督方法。
网址:
https://proceedings.neurips.cc/paper/2020/hash/50c1f44e426560f3f2cdcb3e19e39903-Abstract.html
请关注专知公众号(点击上方蓝色专知关注)
后台回复“NIPS20203DPC” 就可以获取《5篇顶会NeurIPS 2020 三维点云(3 D Point Cloud)相关论文》的pdf下载链接~