「深度图结构学习鲁棒表示」简明综述论文
来自中科院自动化所Yanqiao Zhu等关于《图结构学习》综述论文,值得关注
图神经网络(GNNs)广泛应用于分析图结构数据。大多数GNN方法对图结构的质量非常敏感,通常需要一个完美的图结构来学习信息嵌入。
然而,图中噪声的普遍性需要学习鲁棒表示以解决真实世界问题。为了提高GNN模型的鲁棒性,许多研究围绕图结构学习(Graph Structure Learning, GSL)这一中心概念提出,旨在共同学习优化的图结构及其表示。
为此,在本研究中,我们广泛回顾了学习鲁棒表示的GSL方法的最新进展。具体来说,我们首先制定一个通用的GSL范式,然后回顾最先进的方法,根据它们如何建模图结构进行分类,然后是在其他图任务中包含GSL思想的应用。最后,我们指出了目前研究中存在的一些问题,并对未来的研究方向进行了讨论。
https://www.zhuanzhi.ai/paper/2b1664e52b307d1922cad6a67df1cb01
图在表示对象及其复杂的交互时是普遍存在的。作为一种分析图形结构数据的强大工具,图神经网络(GNNs)已被广泛应用于各种领域的图分析任务,包括节点分类[Kipf and Welling, 2017], 链接预测 [Kipf and Welling, 2016; Zhang and Chen, 2018], 推荐 [Wu et al., 2019; Yu et al., 2020b; He et al., 2020], 信息检索 [Zhang et al., 2021; Yu et al., 2021],等。
众所周知,深度神经网络容易受到噪声的干扰[Szegedy et al., 2014]; 噪声甚至加剧了深度GNN模型所产生的表示质量,这对将GNN应用于现实世界的问题,特别是在一些风险高危的场景中,例如医学分析,提出了巨大的挑战。由于GNN通过递归聚合邻区信息来计算节点嵌入,这种迭代机制具有级联效应——图中的小噪声将传播到邻区节点,影响许多其他节点的嵌入。以社交网络为例,节点对应用户,边表示朋友关系。欺诈账户与真实账户建立虚假链接,很容易向整个网络注入错误信息,导致难以估算账户的可信性。此外,最近的研究表明,不被注意到的、故意的干扰(又称“干扰”)。在图结构中,容易导致错误的预测[Dai et al., 2018;Zhu et al., 2019;Zhang and Zitnik, 2020。因此,GNN对给定数据的质量高度敏感,通常需要一个完美的图结构来学习信息表示[Luo et al., 2021]。
提高GNN模型的鲁棒性的一个主要关注点是为学习表示产生去噪的图结构[Jin等人,2020]。最近,大量的文献围绕着图结构学习(Graph Structure Learning, GSL)这一中心主题兴起,其目标是共同学习优化的图结构和相应的表示[Yu et ., 2020a]。不幸的是,许多GSL技术在不同的研究团体中被提出,它们从未被系统地调研过。为了在不同的研究之间建立联系并便于理解,在本文中,我们对用于鲁棒表示的深度GSL的最新工作进行了综述。具体来说,我们制定了一个通用的GSL范式,根据他们对图结构建模的方式对现有的工作进行分类,并突出每个模型的关键优点。此外,由于GSL在其他方面使GNN受益,我们将讨论在其他领域(如可解释性和图池化)合并GSL思想的应用。据我们所知,这是第一个全面回顾GSL研究最新进展的研究。
本综述的其余部分的结构如下。在第2节中,我们将介绍有关图结构学习的初步知识,并提出描述不同研究的一般范式。接下来,在第3节中,我们将现有的工作分为三个类别,并仔细检查每个类别中的代表性工作。第4节将进一步讨论在其他领域中包含GSL思想的应用程序。最后,我们在第5节中指出了现有工作中存在的一些挑战和一些潜在的研究方向,并在第6节对全文进行了总结。
结构学习的一般范式
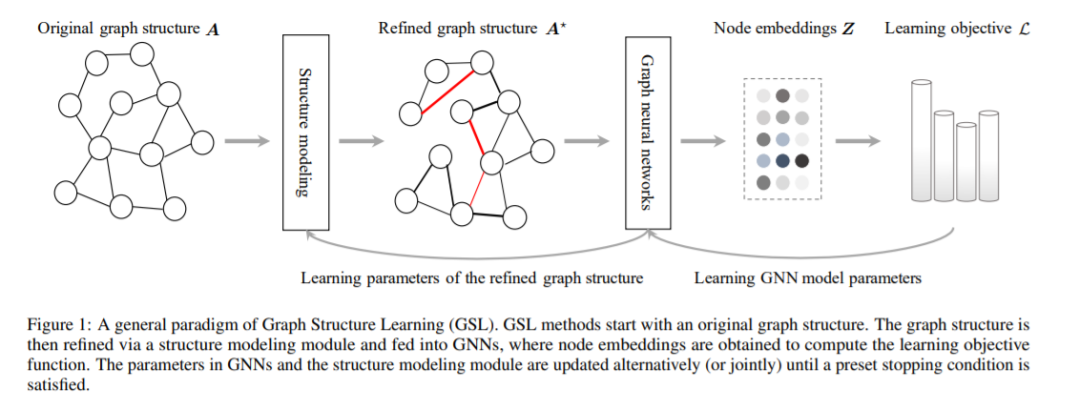
大多数现有的深度GSL工作都可以看作是在学习图形表示的现成GNN模型之上的插件模块。我们用一个通用范式来描述以前的研究,该范式包含三个组成部分: 结构建模、消息传播和学习目标。
结构建模。GSL的核心是一个编码函数,它对最优图结构A*用边权值表示。编码函数可以通过两两距离或可学习参数来定义边缘权值。在本研究中,我们将现有的研究分为以下三组:
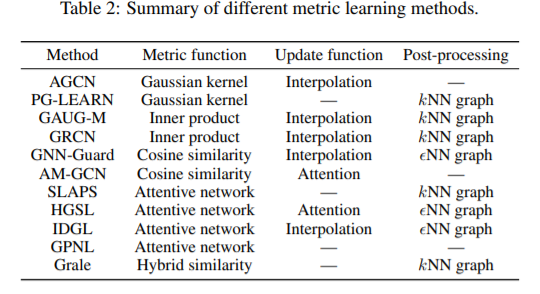
度量学习方法,其中边权值来自于对表示之间的度量函数的学习
概率建模方法,假定图形是通过从某些分布的采样过程生成的,并使用可学习的参数对采样边缘的概率建模。
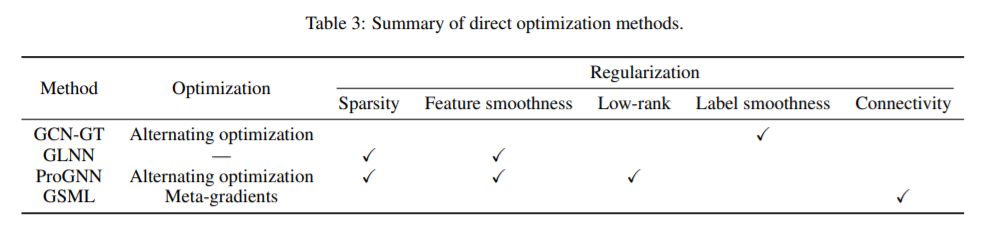
直接优化方法,在原始邻接矩阵的基础上,结合各种图的先验,对图结构进行细化。
消息传播。得到优化后的图结构A*,节点特征将传播到改进的领域。使用GNN模型,每个节点聚合来自邻近节点的信息,并产生一个嵌入Z*= f(A*,X),值得指出的是,由于对图结构进行优化的难度较大,很多方法采用迭代的方式进行结构建模和消息传播,直到满足几个停止条件。
学习目标。为了训练模型与改进的图结构,现有的工作通常定义了一个学习目标包含两个部分: L = L_task(Z *,Y)+ λL_reg(A*,A),第一项Ltask是针对ground truth Y的任务特定目标,如用于节点分类的交叉熵和用于链路预测的贝叶斯个性化排名损失。第二项Lreg对学习到的图结构进行正则化,以满足一些先验拓扑约束,如稀疏性和低秩性。λ∈R是一个平衡这两项的超参数。
专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“DGSL” 就可以获取《首篇「深度图结构学习鲁棒表示」简明综述论文》专知下载链接



