【干货】利用ENVI从航空影像中提取DEM
数字地面高程模型(Digital Elevation Models)是地表形态的数字形式,具有广泛的应用潜力。随着遥感技术的发展,利用遥感影像提取DEM已经得到广泛应用。本文以框幅式航空相片为例,介绍如何利用ENVI软件来提取立体像对航空相片的DEM信息。


ENVI的DEMExtraction模块,要求立体像对图像包含RPC文件,RPC文件用来产生Tie点和计算立体图像之间的关系。因此先要对航空相片构建RPC文件。航空图像可以根据相机参数、地面控制点来构建RPC参数。所以利用ENVI对航空立体像对影像提取DEM的方法分为两步:
一、构建RPC文件。
1)输入相机的焦距和像中心点坐标。(这是相机的参数,一般在数据包中都提供了一些相机参数和飞行参数,可在相机参数报表中获取。
2)
3)
二、利用DEMExtraction提取模块,提取DEM信息。
实例数据采用两幅具有立体相对的框幅式航空相片。框幅式相片的特点是每幅影像上都有4个或8个框标点,在图上以一个圆圈中加一个十字丝的方式表现。
第一步:构建RPC文件
1)设置相机参数,输入相机的焦距和像中心点坐标。
打开ENVI并加载需要构建RPC文件的两幅航空相片。在Map菜单下点击BuildRPCs,选择图像IMG1.。OK!弹出BuildRPCs的窗口(图1)。在该窗口的左栏中选择传感器类型:Frame (框幅式),输入焦距(FocalLength)和像中心点坐标x0,y0。
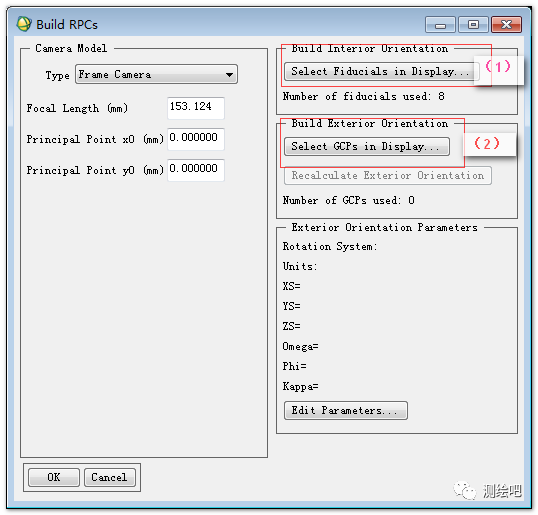
图1 BuildRPCs的窗口
2)
在BuildRPCs的窗口(图1)的右栏,点击Select Fiducialsin Display按钮,弹出InteriorOrientation Fiducials(内定向)窗口(图2)和图像显示的三窗口,在图像显示的窗口中分别找到各个框标点并输入相应的位置坐标,然后AddPoint,依次添加8个框标点的位置参数(图3)。然后在InteriorOrientation Fiducials窗口的Options菜单下选择Export Fiducialsto Build RPCs Widget按钮,InteriorOrientation Fiducials窗口和图像显示的三窗口消失。
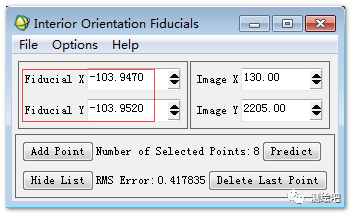
图2 Interior OrientationFiducials(内定向)窗口
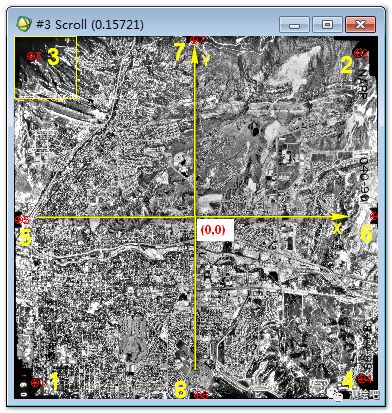
图3 框标点和像中心点的示意图
3)外定向。利用地面控制点外定向,建立影像和地物之间的关系。
点击Select GCPs inDisplay按钮,弹出Select GCPs inDisplay对话框,设置地面控制点的投影信息(图4)。点击OK。弹出ExteriorOrientation GCPs窗口(图5)和图像显示的三窗口。在图像显示的三窗口中选择GCPs,并在ExteriorOrientation GCPs窗口(图5)中添加对应的地理坐标信息和高程信息。在选择合适数量的控制点后,在ExteriorOrientation GCPs窗口的Options菜单下选择Export GCPs toBuild RPCs Widget按钮,ExteriorOrientation GCPs窗口和图像显示的三窗口消失。最后点击BuildRPCs窗口中的OK按钮,出现外方位元素的误差报告(图6)。在波段列表中可以发现,原图像已经包含了地图信息(图7RPC文件自动的加载到影像的MapInfo信息中了。)
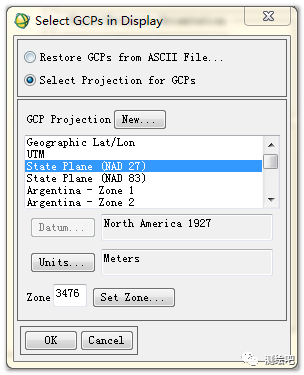
图4GCPs投影参数设置
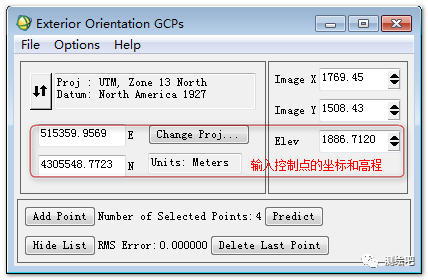
图5 外定向添加GCPs窗口
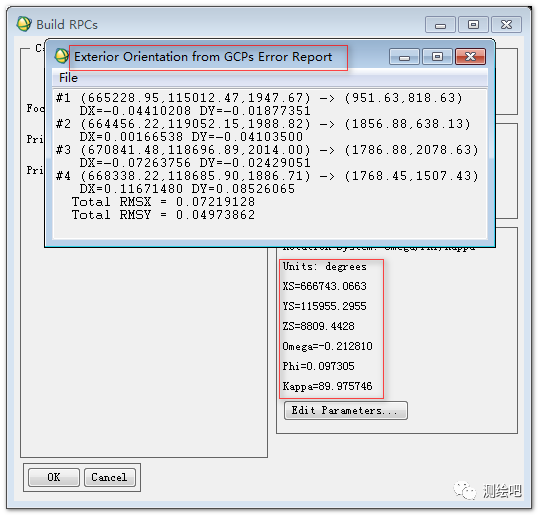
图6 根据GCPs计算外方位元素的误差报告
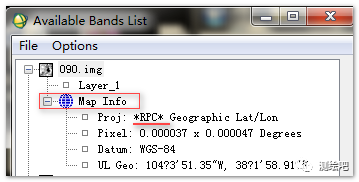
图7 添加RPC文件后的数据
第二步:DEM提取
利用ENVI的DEM提取模块,提取DEM信息。这是一个流程化的操作模块,根据标题提示设置参数后点击下一步,即可完成整个DEM提取的操作。(详细的操作流程,参照《ENVI遥感图像处理方法》。)
1)输入立体相对图像
在ENVI→Topographic→DEMExtraction→DEM ExtractionWizard→New弹出对话框,选择左影像(LeftImage)和右影像(RightImage),单击Next按钮。
2)
提供了三种定义地面控制点的方式:不定义、交互式定义和读取控制点文件。单击Next按钮。
(3)定义连接点
提供了三种定义连接点方式:自动寻找、交互式手工定义和外部读取控制点文件(图8)。选择合适的方式并输入合适的参数,点击Next按钮。软件自动寻找连接点(图9)。
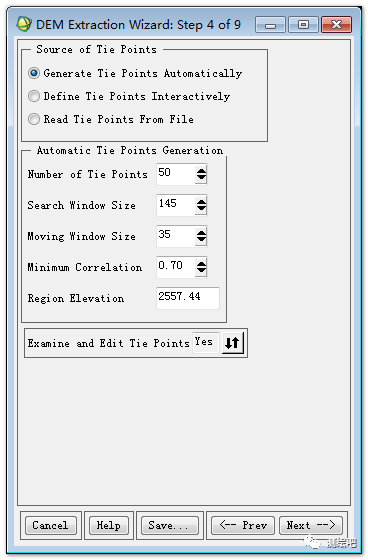
图8 设置自动生成连接点的参数
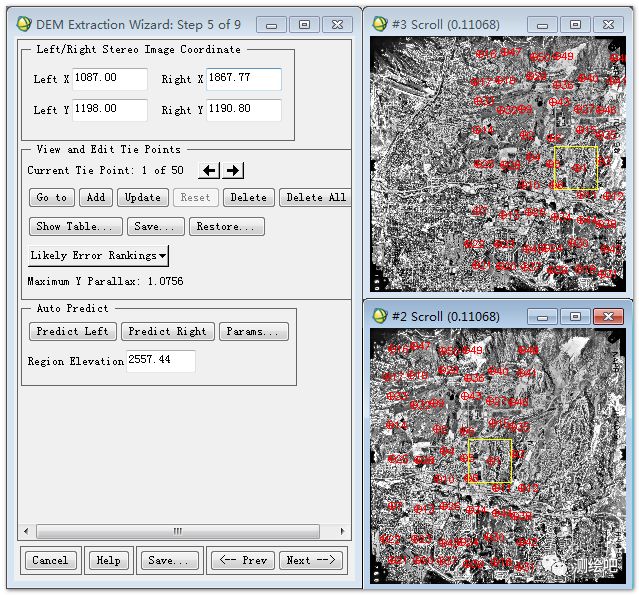
图9 编辑连接点的对话框和生成的同名点
4)设置DEM提取参数和输出投影方式以及输出参数(图10)。
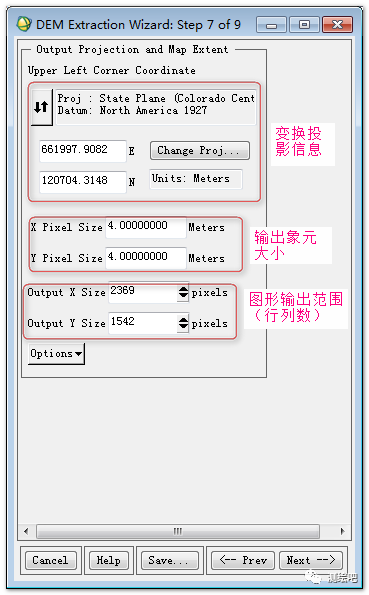
图10 设置DEM的输出
5)输出DEM并检查结果
指定输出路径,得到从航片中提取的DEM信息(图11)。可以将得到的DEM结果可以和原影像图叠加三维显示来检验DEM的效果。为了更加精确的检验提取的DEM精度就必须结合实际的地面点高程信息。
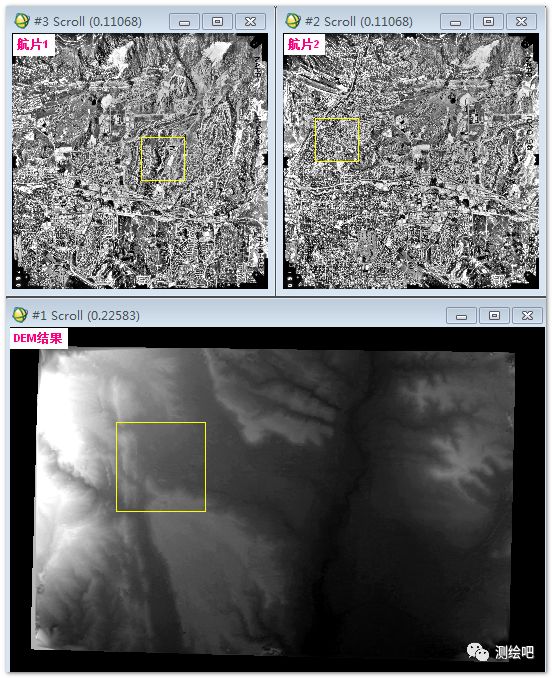
图11 立体像对航片和提取的DEM结果
第三步:结果浏览
将DEM数据导入到ArcGlobe中进行三维展示(图12)。
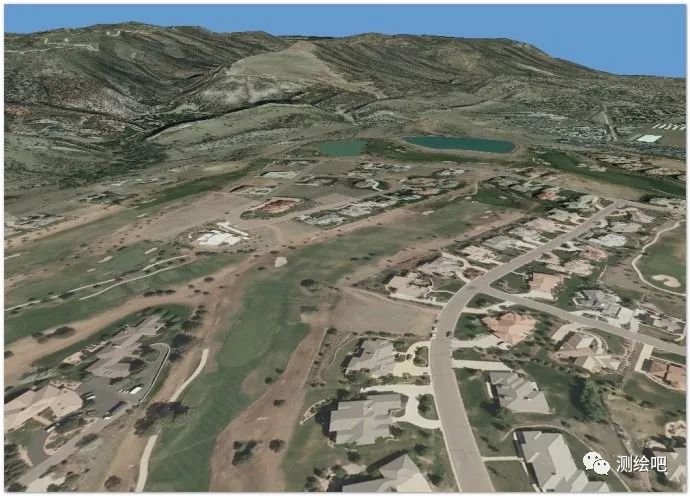
图12 叠加ArcGlobe中高精度影像图的三维效果
用航天、航空遥感图像立体像对生成DEM,不仅数据更新快,而且能够获取不同比例尺要求的DEM。比如航空立体相对影像能够获取大比例尺的DEM数据,如1:1000、1:2000:1、1:5000等。大比例尺的DEM数据应用非常的广泛,如利用航空摄影测量的方法获取设计道路区域地形数据,在此数据基础上进行预科的道路选线和工程量的计算,接着,公路设计人员再进行实地勘测,能具体地确定公路的设计位置。


长按识别图中二维码关注我们!




