ECCV 2022 | 同时完成四项跟踪任务!Unicorn: 迈向目标跟踪的大统一

©作者 | 孙培泽
单位 | 香港大学
研究方向 | 计算机视觉
论文标题:
Towards Grand Unification of Object Tracking
论文链接:
代码链接:

Motivation
-
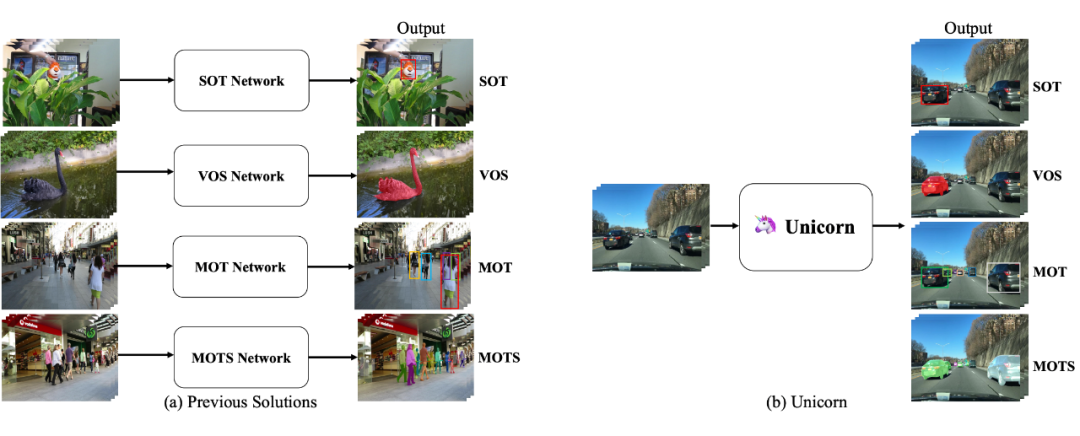
跟踪器可能过拟合特定子任务的特性,缺乏向其他任务的泛化能力。 独立的模型设计导致冗余的参数。例如,基于深度学习的跟踪器通常采用类似的backbone结构,但独立的跟踪模块设计理念阻碍了潜在的参数复用的可能。
-
被跟踪物体的特性不同。MOT 通常要跟踪 几十甚至几百个特定类别的实例。SOT 需要跟踪参考帧中给定的一个目标,无论目标属于哪个类别。 -
需要的对应关系不同。SOT 需要将目标与背景区分开来。MOT 需要将当前检测到的对象与之前的轨迹相匹配。 模型的输入不同。大多数 SOT 方法为了节省计算量并过滤潜在的干扰物,都是以一个小的搜索区域作为输入。然而,MOT 算法为了将实例尽可能全地检测到,通常以高分辨率的全图作为输入。
-
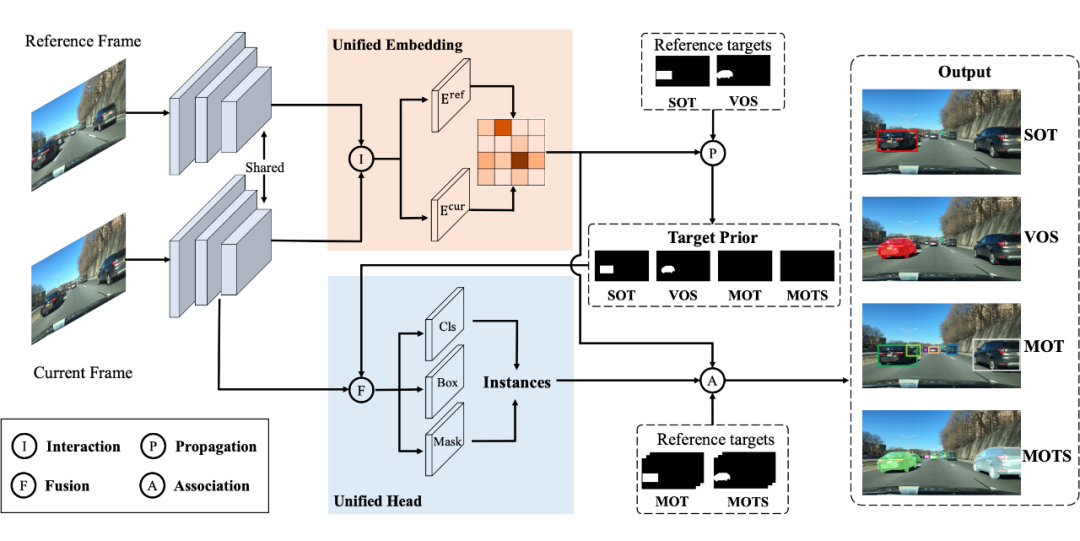
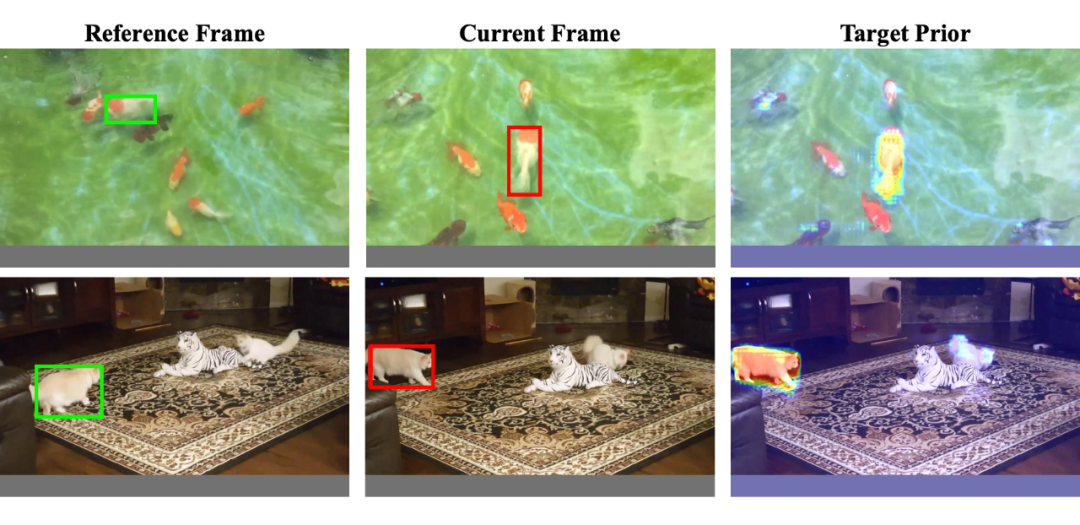
目标先验作为检测头的一个额外输入,是在四个任务之间切换的开关。对于 SOT&VOS,目标先验是通过传播(propagation)得到的目标图,使预测头部能够专注于跟踪的目标。对于 MOT&MOTS,通过将目标先验设置为零,预测头部可以自然地退化成常规的特定类别的检测头部。 -
像素级对应关系是参考帧和当前帧的所有点对之间的相似度。SOT 对应关系和 MOT 对应关系都可以看作是像素级对应关系的子集。 借助目标先验和精确的的像素级对应关系,SOT 可以不再依赖搜索区域,从而和 MOT 一样接收全图作为输入。

Unicorn
2.1 Unified Embedding
-
对于 SOT&VOS,像素级对应关系(pixel-wise correspondence)将用户指定的目标从参考帧(通常是第一帧)传播到第 t 帧,为最终的框或掩码预测提供强大的先验信息。 对于 MOT&MOTS,实例级对应关系(instance-level correspondence)将第 t 帧上检测到的实例与参考帧(通常是第 t-1 帧)上的现有轨迹相关联。
-
对于 SOT&VOS 来说,虽然帧间的像素级对应关系没有现成的标签,但是可以通过监督传播后的 target map 来提供监督信号,即 target map 在目标所在区域的值等于 1,其他区域的值为 0。 对于 MOT&MOTS 来说,实例级对应关系可通过标准的对比学习范式得到,对于参考帧和当前帧上的实例,属于同一 ID 的为正样本,其余的为负样本。
2.2 Unified Head
如图所示,通过传播得到的当前帧目标图的估计可以提供关于要跟踪目标状态的强先验信息,这启发我们在检测 SOT&VOS 的目标时将其作为目标先验。同时,在处理 MOT&MOTS 时,我们可以简单地将目标先验设置为零。
2.3 Training and Inference

Performance
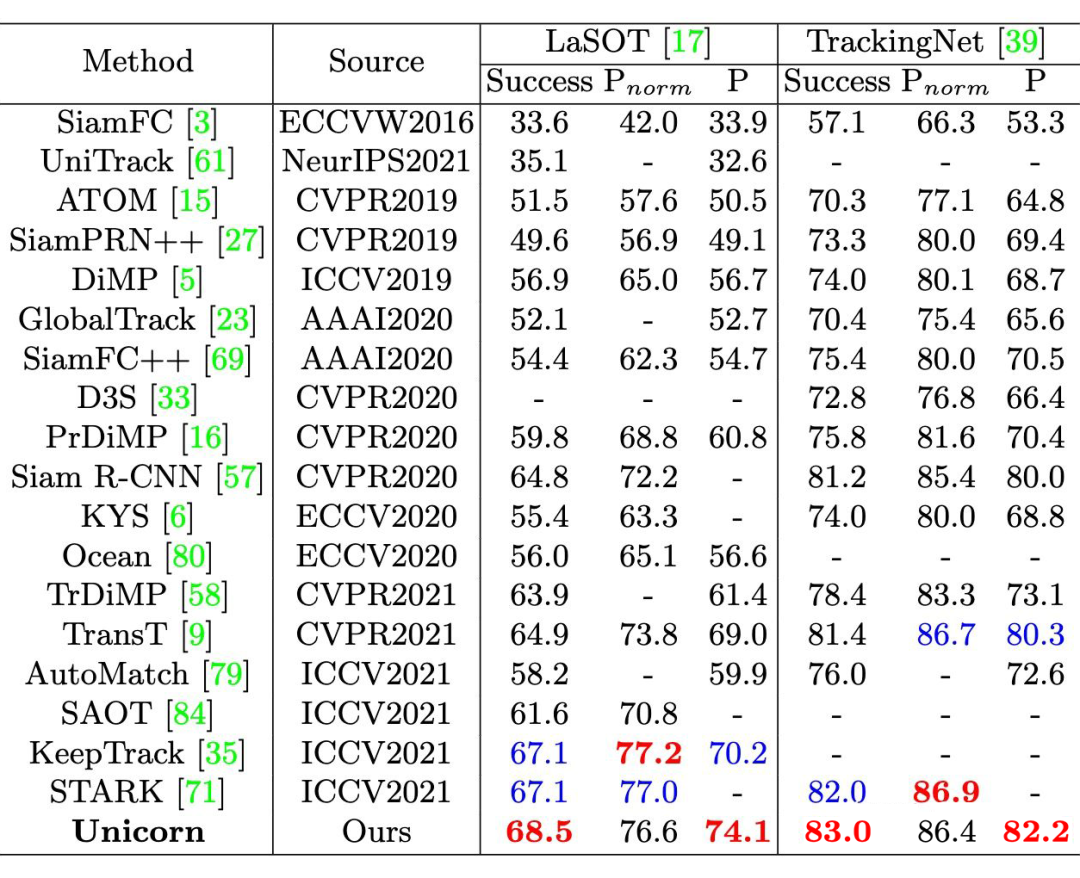
3.1 SOT
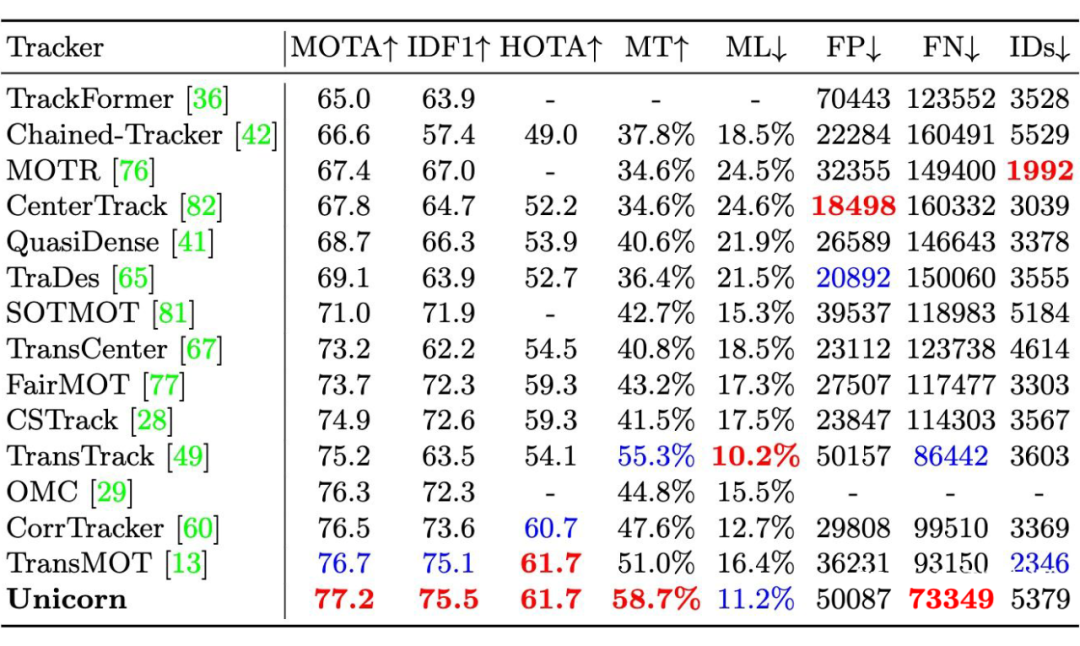
3.2 MOT

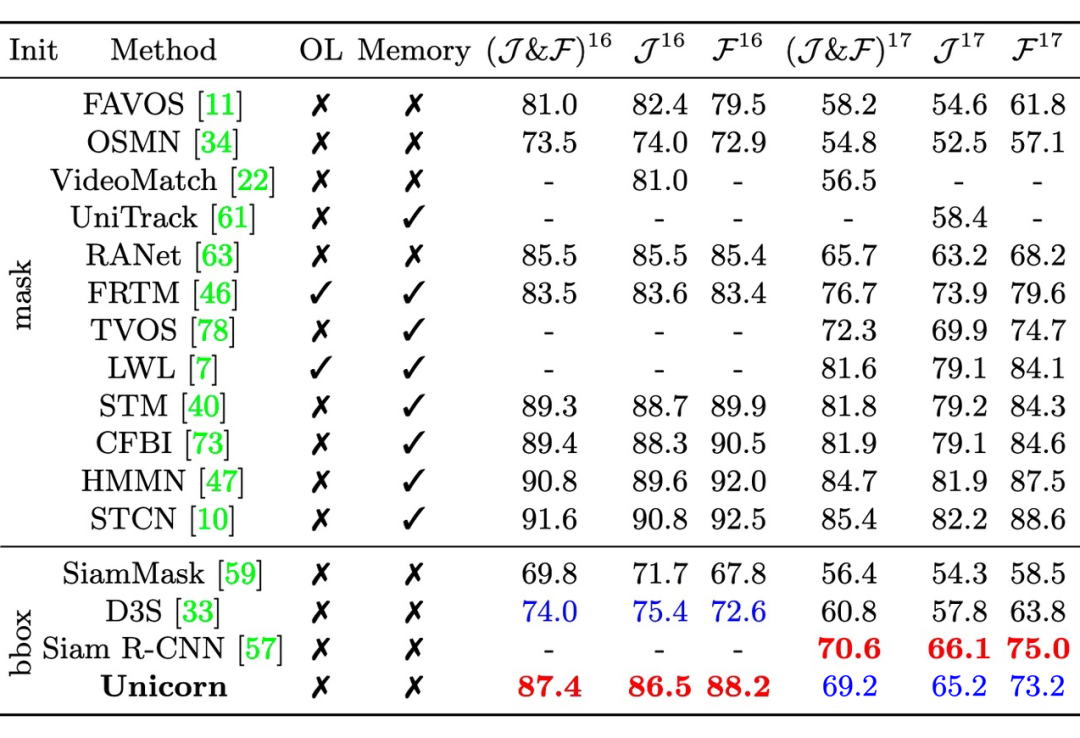
3.3 VOS
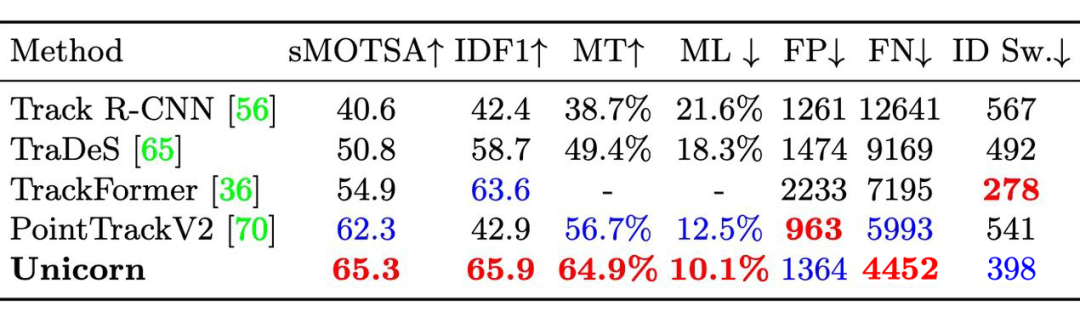
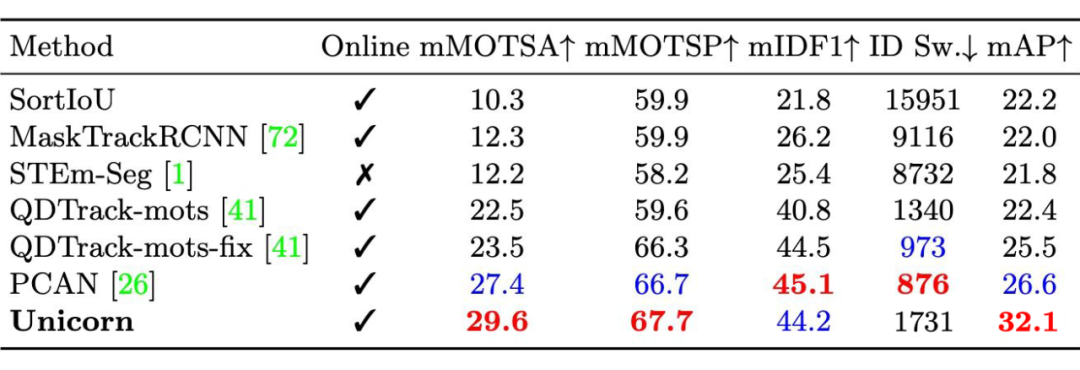
3.4 MOTS

Demo

更多阅读




#投 稿 通 道#
让你的文字被更多人看到
如何才能让更多的优质内容以更短路径到达读者群体,缩短读者寻找优质内容的成本呢?答案就是:你不认识的人。
总有一些你不认识的人,知道你想知道的东西。PaperWeekly 或许可以成为一座桥梁,促使不同背景、不同方向的学者和学术灵感相互碰撞,迸发出更多的可能性。
PaperWeekly 鼓励高校实验室或个人,在我们的平台上分享各类优质内容,可以是最新论文解读,也可以是学术热点剖析、科研心得或竞赛经验讲解等。我们的目的只有一个,让知识真正流动起来。
📝 稿件基本要求:
• 文章确系个人原创作品,未曾在公开渠道发表,如为其他平台已发表或待发表的文章,请明确标注
• 稿件建议以 markdown 格式撰写,文中配图以附件形式发送,要求图片清晰,无版权问题
• PaperWeekly 尊重原作者署名权,并将为每篇被采纳的原创首发稿件,提供业内具有竞争力稿酬,具体依据文章阅读量和文章质量阶梯制结算
📬 投稿通道:
• 投稿邮箱:hr@paperweekly.site
• 来稿请备注即时联系方式(微信),以便我们在稿件选用的第一时间联系作者
• 您也可以直接添加小编微信(pwbot02)快速投稿,备注:姓名-投稿

△长按添加PaperWeekly小编
🔍
现在,在「知乎」也能找到我们了
进入知乎首页搜索「PaperWeekly」
点击「关注」订阅我们的专栏吧

