经验分享 | 2018夏威夷 水面无人艇 全球竞赛
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
自动驾驶,也就是汽车利用传感器和计算机系统实现无人操作的智能驾驶,在20世纪已有数十年的历史,21世纪初呈现出接近实用化的趋势。通过对人类驾驶员长期驾驶实践的理解,无人驾驶技术可以拆解为“环境感知-决策与规划-控制与执行”过程的理解、学习和记忆的物化。随着无人驾驶技术的成熟,相关技术也被逐渐移植到传统船舶方向,即无人船(艇)。
水面无人艇与其它常规海洋装备相比,具有维护成本,能源消耗低,连续作业时间长等特点,能够满足现实水面大区域、长时间的研究任务和工程项目。此外,水面无人艇通过搭载不同的功能模块,能够代替人从事复杂危险的工作,比如灾难事故搜救,水文信息监控采集,海洋生物信息采集,区域海图地形绘制,海洋气象预报;邻海防御任务;特定水域的搜查,侦测及排雷,打击海盗,反恐任务等。目前众多高校及研究机构开展了关于水面无人艇的研究工作,以美国和中国最为领先,而Maritime RobotX Challenge(https://www.robotx.org/)是目前全球性质的最复杂和影响力最大的水面无人艇赛事。本人作为哈尔滨工程大学参赛队伍中一员,参加了2018年在夏威夷举办的第三届Maritime RobotX Challenge挑战赛,比赛时间为12月6日至21日,在此过程中有一些收获,总结与大家分享。
一、Maritime RobotX Challenge介绍
RoboNation是一个非营利组织,其使命是提供实践教育体验的途径,使学生能够找到应对全球挑战的创新解决方案。自动驾驶汽车技术的进步推动了空中和水面水下无人技术的进步,这就是RoboNation举办Maritime RobotX挑战赛的原因。Maritime RobotX Challenge挑战赛从2014年开始举办,第一次参赛队伍有15只,第二次有13支队伍,2018年有15支队伍参赛,这是迄今为止最复杂的水面无人艇竞赛。RoboNation(前身为AUVSI Foundation,Inc)是一家非盈利组织,致力于创建一个由技术专家,学生、研究学者组成的开放社区,为前沿工程领域奠定基础。
RoboNation目前举办的世界性的比赛有SeaPerch Challenge,Inteligent Ground Vehicle Competition(IGVC),Student Unmanned Air System(SUAS),RoboBoat,RoboSub,International Aerial Robotics Competition(IARC),Maritime Robotx等赛事。

二、2018年Maritime RobotX Challenge参赛队伍
Maritime RobotX Challenge自2014年开始举办,每两年举办一届,2016年级2018年都是在美国夏威夷檀香山举办。一方面,檀香山拥有广阔的水域和合适的海湾,这非常适合水面无人艇的航行;另一方面,檀香山距离亚洲、澳洲和美国本土位置居中,能最大缩短各个队伍的设备邮寄的行程;还有一个考虑是环境因素,夏威夷气候宜人,自然环境优美,适合举办大型国际赛事。2018年共有15只参赛队伍,分别来自亚洲的5支参赛队伍、澳大利亚3支队伍和美国7支参赛队伍。我们学校(哈尔滨工程大学)是中国大陆第一支参加Maritime RobotX Challenge挑战赛的队伍,此次共有三只中国队伍参加(哈尔滨工程大学、台湾国立交通大学以及和南洋理工合作的上海交通大学)。其中新加坡国立大学和南洋理工大学都连续参加了三届比赛,昆士兰大学、南洋理工大学、佛罗里达大学以及大阪大学参加了2016年第二届比赛。
| 亚洲 | 澳大利亚 | 美国 |
|---|---|---|
| 哈尔滨工程大学 | 昆士兰大学 | 密歇根大学 |
| 新加坡国立大学 | 悉尼大学 | 安博瑞德航空大学 |
| 南洋理工大学 | 纽卡斯尔大学 | 佛罗里达大西洋大学 |
| 大阪大学 | 佐治亚理工学院 | |
| 台湾国立交通大学 | 佛罗里达大学 | |
| 夏威夷大学诺阿分校 | ||
| 欧道明大学 |

三、比赛项目
根据参加的15天的比赛经历,可以将比赛中主要比赛任务分为8个,都需要由水面无人艇自主完成。每天比赛开始需要将水面无人艇由岸上拖至水中,比赛完成后需要将无人艇回收到岸上。在每次下水之前由裁判先要检查每支队伍设备的安全装置,主要包括显示灯(在遥控模式下需要显示灯为蓝色,自主情况下灯颜色为红色,制动情况下灯为黄色)的情况以及紧急制动按钮(在艇的侧面,按下后全艇断电)。

比赛区域分为A,B,C三个区域,分别有五支队伍交替进行比赛,比赛场地情况如下所示,三个场地完全相同,一字排列在海岸边。沙滩上分别有三个控制场地,供队伍进行岸上调试用。

比赛中主要分布了8个任务,进行任务之前需要向裁判申请,由裁判确定该任务是完全自主完成才能有加分。但由于比赛的海域在公共海域,出于考虑保护野生动物的考虑,每次当海中的工作人员观察到有野生海龟的时候就需要将比赛中无人艇靠岸。
根据比赛期间交流,所有参赛队伍传感器均采用“激光雷达+摄像头”的模式,有的队伍还有航海雷达(探测距离为公里级别)。摄像头大部分队伍有两个甚至多个,能对无人艇360度场景进行建模。

四、参赛队伍介绍
1.新加坡国立大学(冠军)
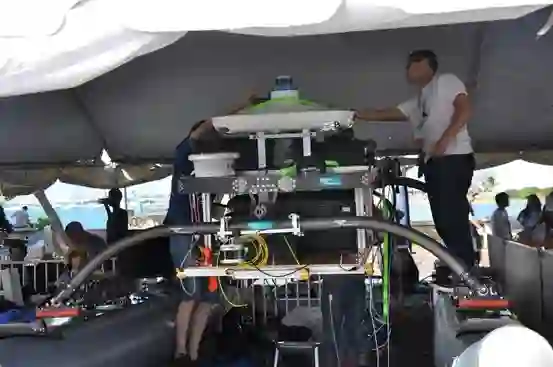
新加坡国立大学是这次比赛的冠军,他们队伍有20个人左右,携带各种设备(运送设备的小推车、对讲机、各种维修设备等),比赛期间,利用间歇时间,近距离仔细观察了他们的无人艇,并尽可能和相应队员进行了交流(英语能力问题和比赛时间紧张限制了跟好的沟通交流)。队伍人员很友好,并帮我们焊接了一些电路。感受是他们队伍的无人艇硬件结构设计精致,可靠性强,拆卸方便,机械零件加工精确。可视化界面做的很好,能够在岸端实时接收掌握各种数据(视频流、图像、导航信息等)。给人影响最深刻的是该队伍的无人艇装配了工业级的故障诊断装置,装配在了无人艇甲板上,能观测到各种数据(电量、电压、传感器数据、推力大小等)。

无线海上通信(个人感觉在硬件上我们和别的队伍差距最大的的地方)
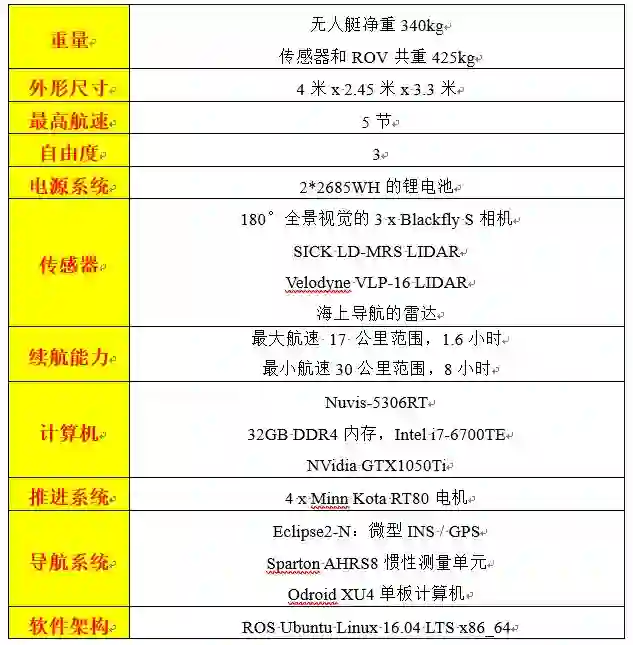
操作员控制系统(OCS)包含到USV的岸上通信链路。通信链路分为两个独立的无线链路。由一对Ubiquiti Rocket Prism AC支持的数据链路是一个高速5Ghz链路,主要用于传输传感器数据,例如摄像机馈送和LiDAR点云。控制链路是一个强大的远程2.4GHz链路,用于发送硬件状态并提供安全功能,如手动远程操作和USV紧急停止。实现了附加的远程控制(RC)链接,以允许在线实时调节程序中参数。并且能传回实时视频流和图片,根据效果更改程序。

2.昆士兰大学(亚军)
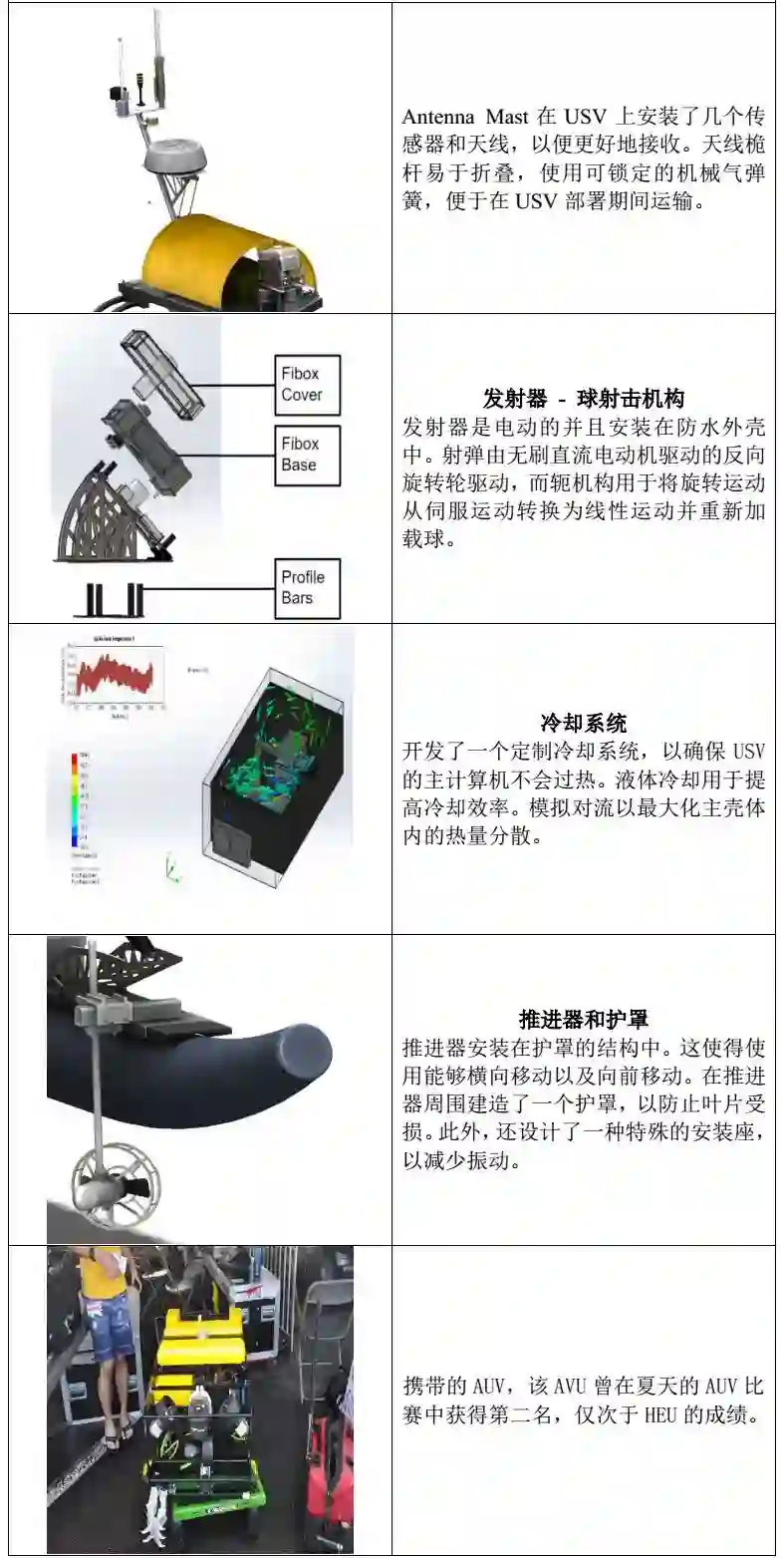
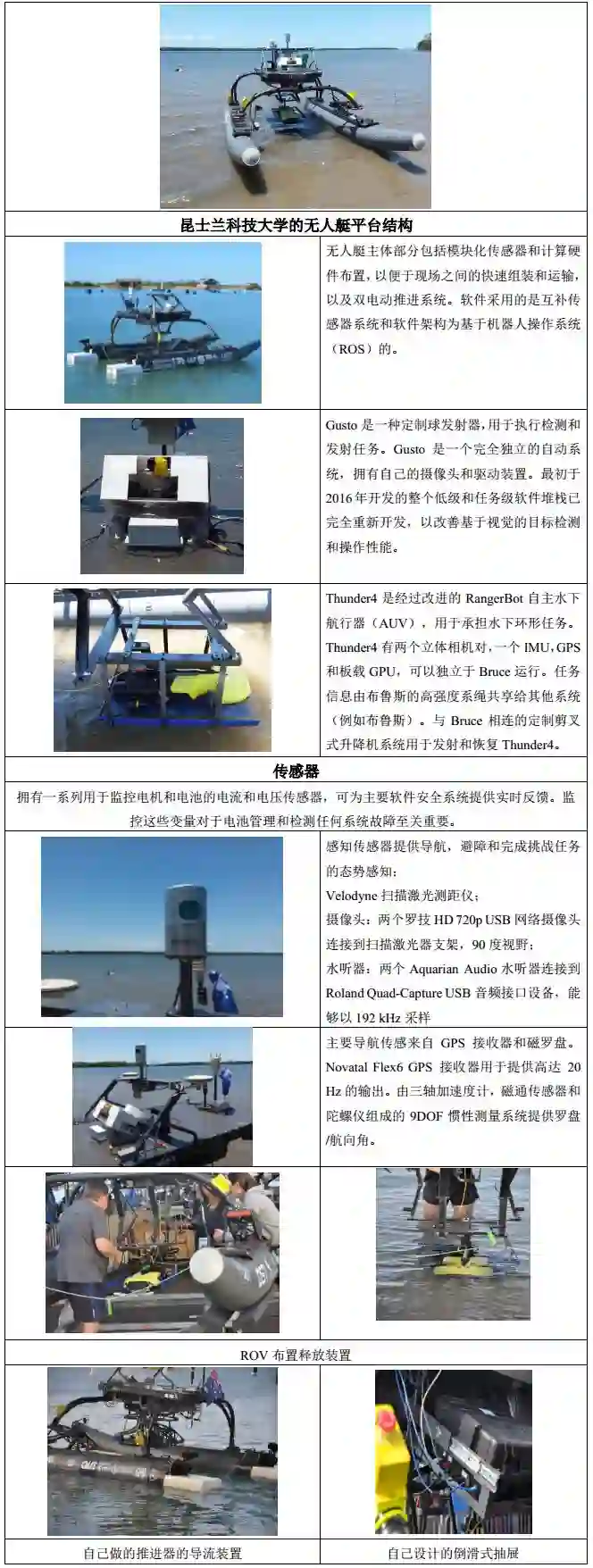
昆士兰大学是一支成员很少的队伍,加上老师在内一共5个人,他们的调试场地在我们队伍的隔壁,给人的印象是队伍在按计划开展工作,紧张有序,分工明确。他们下水时间在所有队伍中不是很早,但完成任务数量确实最多的,效率极高。他们的无人艇包括三个独立的机器人平台;(1)Bruce USV,(2)Gusto球发射器,(3)Thunder4 AUV。每个系统使用机器人操作系统(ROS)通过主任务计划器协调其操作。设计了非常简单实用的机械手用来收集水下环,并且自己改装了无人艇推进器的导流装置。
图像处理采用的是语言是python-opencv和C++的opencv。其中三角形、圆形、十字形、矩形等形状检测用的是模板匹配方法,涉及颜色阈值分割,提取到形状,最后跟几个模板进行匹配。颜色识别用的是阈值分割,需要自己调节阈值。(但在比赛的第一天看到他们在用深度学习工具标注图像,在现场自己带的机器上进行训练,所以具体的识别算法并不确定。)
3.佛罗里达大学(季军)
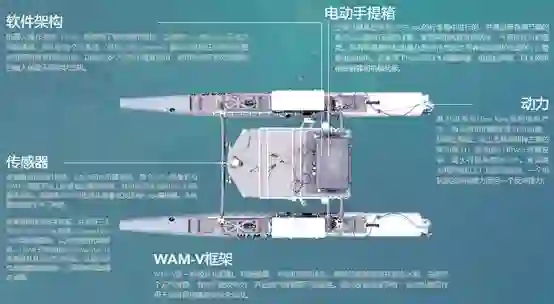
该队伍的USV是基于双体船WAM-V船体的自主水面无人艇。利用充气浮筒制造,船可以快速组装和拆卸,方便运输。在水线以上,船形管状设计提供了刚性,并且通过限制到船体的附接点的数量使得船的构造和组装更简单。主要部件平台漂浮在偏置杠杆臂悬架上,以在船舶移动通过水时吸收振动。所有计算机和电子设备均采用轻质防溅外壳。该外壳不仅可以保护设备免受元件影响,还可以通过绝缘材料提供冷却。图像处理算法是Faster-RCNN,显卡选用的是2块RTX2080。带有2个前置摄像头(采用水密筒)和一个激光雷达。推进器自己设计了保护罩,前面装了两个侧推。经过他们比赛的时候我们观看,该队的USV定位能力是所有队伍里面最好的,而且抗流能力最强。

4.大阪大学
大阪大学也是第一次参加比赛,队伍里面有一个公司职员,该公司是做无人驾驶的公司,无人艇平台的软件系统是该员工开发的(ROS),图像处理算法是基于YOLO,在控制舱里面有三块Jetson Tx2。该队的无人艇硬件设计的很规范会,感觉器件分布合理,很整齐。传感器也就只有一个激光雷达和摄像头,摄像头布置在最前面。
5.台湾国立交通大学
他们队伍在台湾专门为此次比赛开设了一门课程,课程将涵盖组合对象识别,姿势估计,运动规划和SLAM的挑战。系统地研究2014年和2016年以前获奖团队的每个组成部分,以及可能更好地改善绩效的尖端方法。学生将组建团队来开发学期项目,课堂讨论和演讲技巧与白板一起参与课堂活动。课程是“边做边学”,包括每个教学模块中的课堂实验/教程。使用“Duckietown”(开放课程“麻省理工学院2”。
他们带有一个激光雷达(150万台币,跟台湾科技部借的),整个系统全部采用ROS系统,5月份开始做的,团队里面大部分都是研究生。总共有5个摄像头(一个摄像头成本500美元左右),携带有ROV(购买的产品),感知主要是基于激光雷达,采用的是caffe的CNN,控制算法采用的是PID
教科书和资源:
1.计算机视觉:算法与应用,Richard Szeliski,Springer,2010。
2.机器人,视觉和控制,Peter Croke,Springer,2011。
3.自主机器人简介,Nikolaus Correll,2015。

6、安博瑞德航空大学

7.佛罗里达大西洋大学
佛罗里达大西洋大学给人最大的印象是他们的激光雷达被机械结构不停带动旋转,增加了探测的范围,检测效率提高了15%。

8、欧道明大学
9.密歇根大学
密歇根RobotX团队由三名教师顾问,四名行业导师和一支由十六名本科生和研究生组成的多学科团队组成,专业涉及海军建筑与海洋工程,电气工程,航空航天工程,机械工程,机器人和计算机科学技术等领域。他们的无人艇同心一直出现问题,短暂下水两次。一个摄像头(5个面,前、后、左、右、上),两个激光雷达一前一后,采用神经网络来检测图像。

10.悉尼大学
悉尼大学的USV好像没有下水,他们团队只来了一个工程师和三个学生,每天干的也很晚,基本都是搭最后一班车回酒店。他们也是采用单雷达和单摄像头。他们也做了AUV,但由于某种原因并没有带去夏威夷,他们有2个GPS(具体什么作用忘了),他们自己改装的推进器很高大上,但当时拍了图片,回来没有找到。
11.南洋理工大学
南洋理工和上海交大组成联合团队(但只见了上海交大的三名学生和一名背包的最后晚宴才出现的南洋理工老师)。一个激光雷达和一个摄像头,全部系统也是基于ROS的,前面装备了一个可以360度旋转的螺旋桨,也是用神经网络来做检测。他们的通信出现很大问题,存在无线电干扰。同时他们的动力不足,无人艇在波浪中很难前进。定位也不准确,开始在岸上调试了很久的定位问题。

12.佐治亚理工学院

佐治亚理工学院USV
传感器:
激光雷达:Velodyne VLP-16
摄像头
水听器:Teledyne水听器TC4013
IMU和GPS:Microstrain 3DM-GX3
推进器:
Torqeedo
电子器件:
主计算机:Intel NUC
I / O板:Arduino Due
13.夏威夷大学马诺阿分校
夏威夷大学摄像头用的是罗技C920,图像处理用的是Matlab的神经网络,GPS用的是手机自带的定位,自己制作了彩色灯(我们还借了他们的彩色灯),他们给了我们一些他们自己的图片。无人X系统(UXS)研究小组分为五个研究子系统:
机械设计
硬件选择和互操作性
传感器融合和信号处理
导航和控制
任务规划和自治
五、中外对比分析
1、 我们缺乏远程调参的硬件支持,每次调参只能把无人艇开回来,浪费时间和电力。而且感知部分只能采用远程登录方法查看检测结果,当距离超出无线的范围后就会失去连接,不知道实际的检测效果,也就无法做到实时调参。另一方面,对实验数据的搜集也造成了很大问题(后期为了搜集数据,直接将笔记本电脑开着远程登录和录屏模式放在了无人艇抽屉中)。
2、 图像处理采用的是Faster-RCNN方法,在实验室机2块Titan XP上检测一张图片的时间为0.3-0.5s左右,而比赛缺乏GPU支持,采用CPU运算,降低了运算速度,经过长时间的检测,发现每张图片的检测时间在3-5s之间。虽然无人艇是慢机动平台,但近距离目标检测提出了很大挑战。同时,如果检测速度更快,信息融合的效果会更好。所采用的Jetson Tx2,经过和师兄交流和实际检测发现适合用于一些小网络,并不适合VGG的Faster-RCNN。所以改进速度有两个方法:硬件支持,提供GPU;改变使用的算法,如YOLO、SSD(这两种算法经过实际检测准确度比Faster-RCNN低很多,跟别的队伍队员交流,也得到了相同的信息)。
3、 别的队伍采用的是ROS系统,而且绝大部分控制和感知用的都是ROS,(控制部分)和Ubantu(感知部分)两台,根据了解,ROS的确方便快捷,而且搭建整套软件系统要花费的时间短,系统中的变量易于访问。ROS提供了广泛的库文件实现以机动性、操作控制、感知为主的机器人功能。
4、 硬件方面凸显了咱们的不足,在到现场第一天,为我们队伍基本是最早一批开始搭建无人艇平台的,但花费时间却是最长的,而且远远长于别的队伍。这里面的问题是一些结构的不合理性和零件的加工精度问题。抽屉上的螺丝安装了1个多小时,水听器的垫片由于加工精度差距很大,最后也只安上了3个螺丝。另一个方面,甲板上的螺丝也较多,安装复杂,需要上下2个人负责,大大消磨了时间。大多数队伍的电池放在了无人艇的两次,这样安装、拆卸都更加省力方便,只需要最好防水措施,而且走线比较方便;咱们放在抽屉里,走线复杂、安装拆卸费时费力。个人认为硬件改装方面需要大家借鉴别人的改装经验,对艇体能优化和简化的地方进行改进,重新分配各个部分的位置。
5、 跟组织方的沟通问题。组织方让下电把板子烧掉浪费了一天多的时间去处理这个问题,而且关于灯的变色问题之前也不了解,有花费了很多时间去处理这个问题,如果能跟组织者有更好的提前沟通交流,这个问题可以提前解决,节省了下水做任务的时间。
6、 可视化界面的问题。每个队伍都有自己感知部分的可视化界面,而且做的都比较好,利用Qt、Tk等开发的,能实时看到感知信息和无人艇输入的信息,这方面在有了硬件支持的基础上应该做一套界面。做的方向可以参考新加坡国立大学和佛罗里达的大学(拍了界面照片)。
7、 要舍弃控制箱,所有的队伍都是一个手柄和一台笔记本就能实现对艇的控制,只有我们还用笨重的控制箱。一方面做控制箱需要浪费很多时间,做出来又不能长时间保证稳定工作(在实验期间控制箱出现多次问题:无线电、遥感等);另一方面,不方便携带和转移。我们比赛期间从调试场地到比赛场地,需要人搬着沉重的控制箱,而且当我们的艇下水需要遥控到比赛区域都很难做到。
六、生活感受
我们队伍总共有9名队员,有8名学生和一名指导老师组成。我们每天大概5点20起床,起床集合在酒店门口坐比赛方的大巴去比赛场地,车程大概45分钟。到了场地海边,一般会吃提前在超市买好的汉堡、鸡肉卷和鲜奶(不得不说美国的汉堡中的牛肉很厚,鸡肉卷真的很冷,感觉是刚从冰箱拿出来的;鲜奶也很新鲜,一般两天就会坏掉),然后开始上午的工作。中午12点左右吃饭,比赛场地有外卖车,一个盒饭大概7美元,包括各种牛肉饭、鸡肉饭和海鱼饭(里面有个各种黑暗作料,真吃不习惯),后来就会直接伴着老干妈吃。晚饭一般会在酒店周围的饭馆吃,一般会披萨、汉堡和牛肉饭(刚开始还是很好吃,过几天就吃不下了)。在夏威夷吃过最好的饭是日本料理(就是中国面条+油炸食品),但需要排队(其实也很贵),后来老师直接租了辆车,买了电饭锅在酒店做完饭(煮面条+大虾)。

钻石山上俯视檀香山

这个比赛我们10+个人准备了大概半年,从集装箱中接下无人艇,开始改装无人艇,到硬件+软件系统的搭建,再到两次外场试验。在实验室、松花江以及夏威夷都留下了我们这组人奋斗的回忆。回首这段日子,在实验室包宿改代码,一起开会6个小时解决问题,一起在江边住2个月来调试画面都出现在眼前,青春无悔。幸运地,在比赛期间结识了一些相同专业国外朋友,在专业方面进行了深入交流。最后的决赛阶段,当地夏威夷电视台进行了网络直播(https://www.youtube.com/watch?v=TjKFDioIjYE需要翻墙)。最后,我们试验和比赛过程都被吉林卫视和中央台进行了全程跟踪,他们也专门做了一档栏目来讲述这个比赛,由于剪辑问题还没有播出,等播出时会给大家贴出网址。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、算法竞赛、图像检测分割、人脸人体、医学影像、自动驾驶、综合等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

推荐阅读

最新AI干货,我在看






