决策树算法

注:图片来自网络
分享嘉宾:张道甜 算法工程师
编辑整理:Hoh Xil
内容来源:作者授权
出品社区:DataFun
注:欢迎转载,转载请注明出处
——决策树算法——
决策树算法可以实现分类算法、回归算法,计算复杂度不高,对缺失值不太敏感,同时可以处理不相关特征;同时是集成学习算法 Random Forest 的基础算法。
——决策树类型——
1. ID3:解决分类问题
❶ 分裂节点:计算信息增益,值最大的为当前分裂特征
信息论中定义为互信息:
熵的理解:特征的取值越多,其信息熵越大
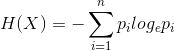
X 代表特征,n 为特征 X 的不同取值的数量,Pi 是取第 i 个值的概率;
条件熵:在 Y 条件下,X 的熵

信息增益:
❷ ID3算法的不足
没有考虑过拟合问题
没有考虑缺失值
信息增益为分裂标准,容易偏向于取值较多的特征
没有考虑连续特征变量 ( 但可通过连续特征离散化处理 )
针对 ID3 的不足,出现了 C4.5 算法.
2. C4.5:解决分类问题
❶ 分裂节点:计算信息增益的增益率,即该特征的信息增益与特征熵的比值,值最大的为当前节点的分裂特征。
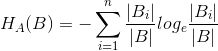
特征熵:
信息增益比:
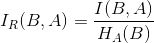
样本特征 A 的特征值越多,则分母 ( 特征熵 ) 越大,分裂节点可以避免偏向特征值较多的特征。
B 为样本集合,A 为样本的特征,n 为特征 A 的类别数,Bi 为特征 A 第 i 个取值对应的样本数,|B| 为样本数;
❷ C4.5 的优点:
采用信息增益比,解决了 ID3 信息增益偏向于取值较多的特征的问题
考虑了 ID3 没有解决连续属性离散化问题
e.g. 某样本中特征 A 为连续特征值,根据 A 的所有取值,从小到大排序,分别取出所有相邻两个值的均值,记做集合 m,然后计算 m 中的每个值当做二元分类点的信息增益,选择信息增益最大的值为连续特征 A 的二元分类点。
缺失值的自动处理策略
C4.5 引入了正则化系数进行初步剪枝
❸ C4.5 的不足:
只能用于分类
剪枝方法有优化空间
生成的是多叉树,但使用二叉树会比多叉树效率更高
选择了复杂度较高的熵来度量,计算比较耗时,且遇到连续值还需要进行排序
3. CART 树:可以解决分类和回归问题
❶ 分裂节点的选择:
CART 树选取特征是根据基尼系数,基尼系数越小,模型的不纯度越小。ID3、C4.5 都是基于熵的运存,会涉及大量的对数运算,为了解决这个问题,CART 树用基尼系数作为分裂特征选取标准,首先我们理解一下基尼系数:
在分类问题中:如果一个数据集有 i 个类别,第 i 个类别的概率 Pi,那么基尼系数为:

则二分类的基尼系数:

在分裂节点中,如果一个样本集合选取 A 特征的某个值,将数据集分为 D1、D2 两部分,那么数据集在 A 特征下的基尼系数为:

同时针对 CART 树,一方面选取了基尼系数作为特征选取的衡量标准,另一方面采用的是二叉树而不是多叉树,那么在运算效率上就会有很大的提高。
❷ CART 分类树对连续值的特征变量离散化
CART 分类树在处理连续特征变量与 C4.5 的处理方式是一样的,唯一区别就是选取划分点时的度量值不同。
e.g. 某样本中特征 A 为连续特征值,根据 A 的所有取值,从小到大排序,分别取出所有相邻两个值的均值,记做集合 m,然后计算 m 中的每个值当做二元分类点时的基尼系数,选择基尼系数最小的值为连续特征 A 的二元分类点。可以将小于这个点的分类为 A 类,大于这个点的分类为 B 类,这样就将连续变量离散化了。
❸ CART 回归树对连续值的特征变量离散化
采用的是和方差的度量方法:
e.g. 某样本中特征 A 为连续特征值,根据 A 的所有取值,从小到大排序,分别取出所有相邻两个值的均值,记做集合 m,当二元分类点 x 将数据分成了 s1、s2 两个集合,则针对两个数据集合,分别计算均方差,最后求和,那么和方差最小的为当前特征的划分点。
❹ NOTE:CART 树是一个二叉树,ID3、C4.5 是多叉树
e.g. 在分类问题上:某数据集上有特征 A,有 A1,A2,A3 共三个类别,那么在 ID3、C4.5 算法中,会建立成三个分支。但是在 CART 分类树中,会将 A1,A2,A3 划分成 {A1,A2} 和 {A3}、{A1} 和 {A2,A3}、{A2} 和 {A1,A3},分别计算基尼系数,最小的一组为当前节点特征 A 的分裂依据,同时特征 A 还有机会参与以后的节点建立,这是与 ID3、C4.5 不同的地方。
❺ CART 回归和分类树对结果预测的区别
CART 回归树预测结果是根据叶子节点的中位数或均值作为预测结果,而 CART 分类树是根据叶节点的类别概率最大的作为预测结果。
❻ CART 树剪枝
决策树算法会出现过拟合现象,那么为了提高了模型的泛化能力,降低过拟合,CART 树提供了剪枝的方法。剪枝的方法有预剪枝和后剪枝,CART 树采用的是后剪枝的方法。剪枝的过程会产生很多剪之后的树,那么我们采用交叉验证的方法评测各个剪枝效果,选出效果最好的树作为最终的模型。
CART 回归树和 CART 分类树的剪枝过程是一样的,只是在损失函数上的度量方式不一样,一个是使用基尼系数,另一个是使用均方差。
损失函数的度量:
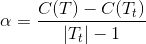
在剪枝过程中,对任意一棵子树 Tt,其损失函数为:

其中,α 为正则化参数,C(Tt) 为训练数据的误差 ( CART 回归树用的是均方差,CART 分类树是基尼系数 ),|Tt| 为叶子节点的数量。
当 α=0 时,则原生的 CART 树是最优的子树;
当 α=∞ 时,则 CART 树的根节点组成的单节点树为最优子树
当 α 越大,剪枝的越厉害,其剪枝的后的树越小。
剪枝思路:
当位于节点 t 的任意一颗子树 Tt,没有剪枝的情况下,其损失:
当剪枝到根节点,即只保留根节点,其损失是:

当 α=0 或者很小时,则:
所以当 T 和 Tt 满足 
就可以对 Tt 进行剪枝,将子节点全部剪掉,剩下一个叶子结点 T。
最后要做的就是交叉验证,当我们计算出所有节点是否剪枝的 α,将 α 对应的最优子树在训练集上进行交叉验证,找到最优子树作为最终结果。
以上是我对 CART 树的理解,谢谢大家。
原文地址:
https://blog.csdn.net/weixin_39948381/article/details/90601931

文章作者
张道甜,算法工程师,某公司的智能评估定价算法体系负责人。
——END——

文章推荐:
DataFun:
专注于大数据、人工智能领域的知识分享平台。

一个「在看」,一段时光!👇



