【泡泡一分钟】用于城市街景的实用运动分割
每天一分钟,带你读遍机器人顶级会议文章
标题:Practical Motion Segmentation for Urban Street View Scenes
作者:Cosimo Rubino, Alessio Del Bue and Tat-Jun Chin
来源:2018 IEEE International Conference on Robotics and Automation (ICRA)
编译:孙钦
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

运动分割虽然是一个被长期研究的问题,但它尚未迁移到实际应用中。我们认为实现这一目标的关键步骤在于解决针对特定的感兴趣设置的运动分割问题。为此,本文提出了一种关于图像运动分割的新方法,用于在城市环境中进行车辆导航。我们利用两个特定的因素(受限的相机运动和已知类型的运动目标)来处理两个影响大多数以前“通用”运动分割算法的主要因素(缺少数据和强大的透视效果)。
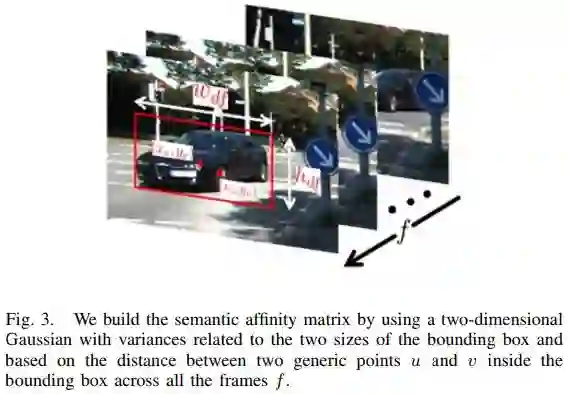
图1 我们通过使用二维高斯来构建语义关联矩阵。
除了新颖的算法,我们通过从KITTI数据集中标注实际视频序列,贡献了一个基于运动平台的更实用的运动分割基准数据集。在这个数据集和其他合成的数据集上的实验证明了我们提出的方法的有效性。
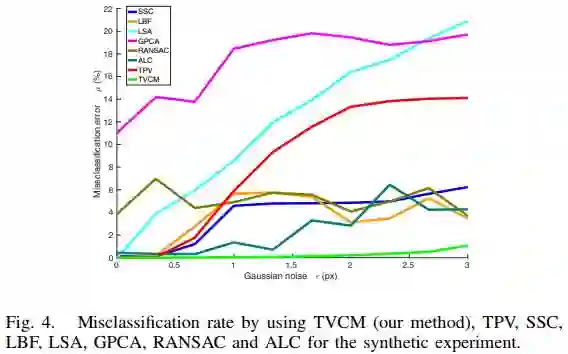
图2 对于合成实验,使用TVCM(我们的方法),TPV,SSC,LBF,LSA,GPCA,RANSAC和ALC方法的误分类率

图3 从KITTI数据集9个序列中的2个序列使用特征点上的两个透视运动分割方法的定性结果。TVCM和S-TVCM (我们的方法), TPV和S-TPV。点的内部表示分段,而点边界表示GT。关于更大的图,请参阅作者各自主页上的补充文件
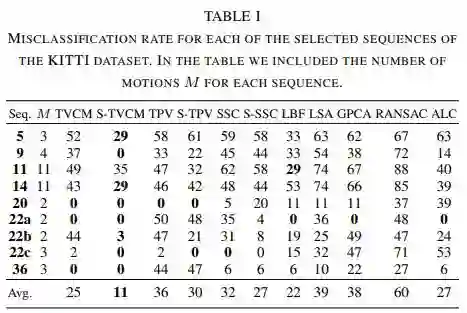
表1,KITTI数据集上每个选择的序列的误分类率。在表中我们包括了每个序列的运动数量
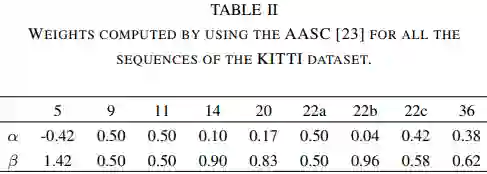
表2,使用AASC方法对KITTI所有数据集计算权重

Abstract
Though a long-studied problem, motion segmentation has yet to migrate into practical applications. We argue that a vital step towards that goal lies in addressing motion segmentation for the specific setting of interest. To this end, this paper presents a new approach for image-based motion segmentation in the case of vehicles navigating inside an urban environment. We exploit two application-specific factors – the restricted camera movement and the known type of moving objects – to deal with the two major limiting factors – missing data and strong perspective effects – that affect most previous “generic” motion segmentation algorithms. By constraining the geometry and exploiting known semantic classes in the scene, we achieve much higher accuracy than previous approaches. In addition to the novel algorithm, we contribute a more realistic motion segmentation benchmark dataset for moving platforms by annotating real video sequences from the KITTI dataset. Experiments on this dataset and other synthetic data confirm the effectiveness of the proposed approach.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘提取码:fvwz
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





