MIT“食人花”机器人,能抓起120倍重的物体,软硬皆可,不问形状
栗子球 发自 凹非寺
量子位 报道 | 公众号 QbitAI

很久很久以前,我家门前的草地上,养着一片食人花。
每每有僵尸来犯,花儿便张开血盆大口,抓住它们……
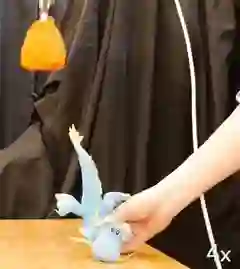
其实,我家门前没有什么草地。但MIT真的培育了一只“食人花”机器人:
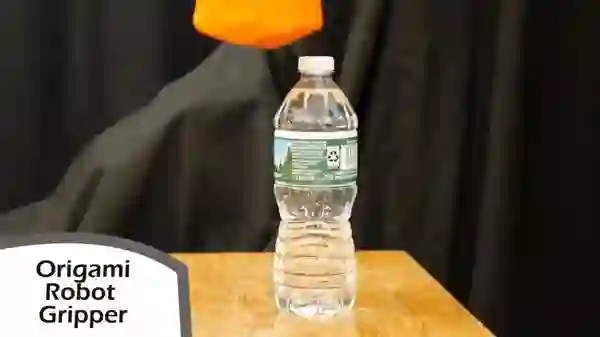
一张一合之间,猎物已经牢牢在口 (上图没有加速) 。
拿葡萄的时候,不会用力过猛伤了果肉。
拿酒瓶的时候,不会力气太小摔在地上。
就算是比自己重120多倍的物件,它也并不畏惧,并登上了机器人顶会ICRA 2019。
表面看去,气球而已,为什么这样灵活啊?
折纸,是优雅的技术
春天来了,凑近一点,欣赏花朵的开合吧。

慢条斯理,却坚定有力。
表面是软嫩又富于弹性的气球,内里有灵动的骨架可以折叠。
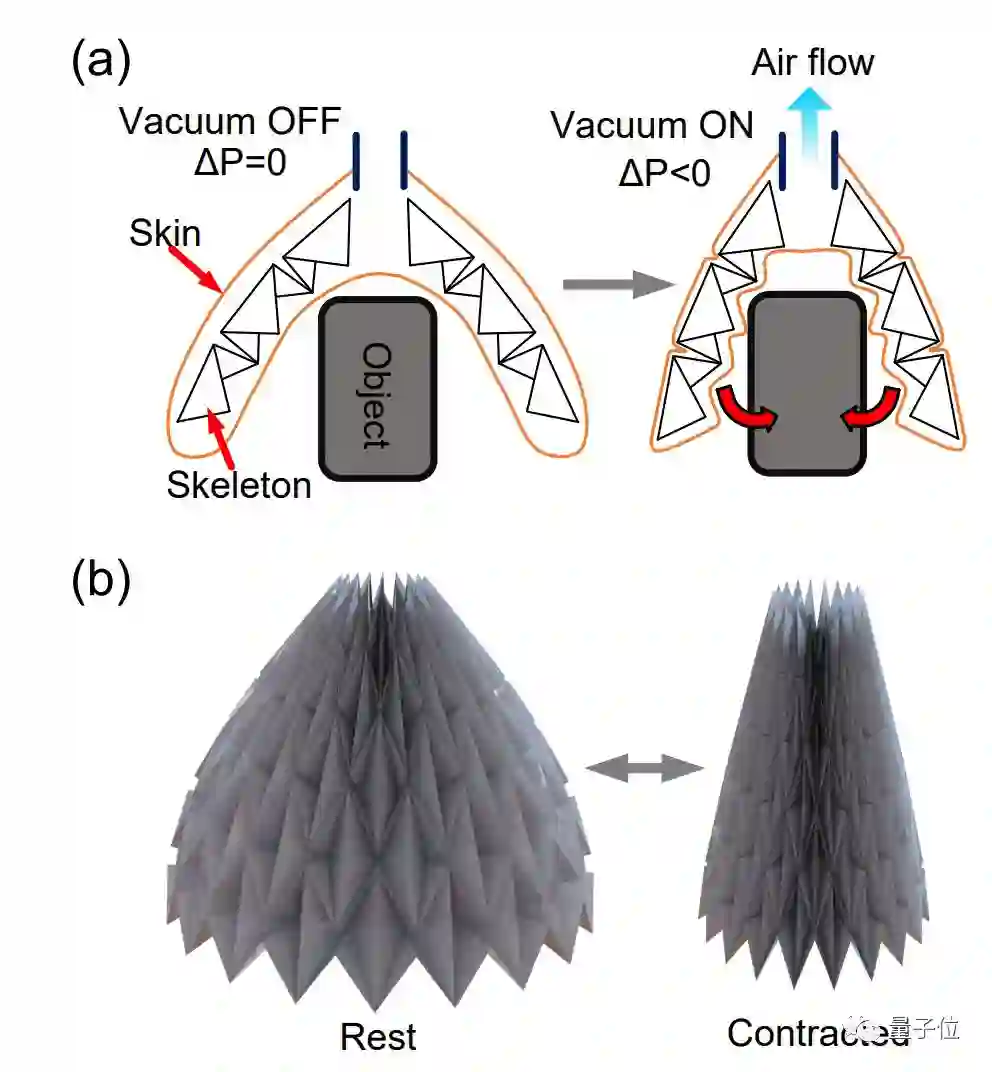
气球里面是个空腔,里面有空气的时候,就是花朵绽放的时候,骨架惬意地舒展。
一旦抽了真空,花瓣紧皱,骨架折叠,便有了强大的力量,可以紧紧咬住猎物。
你看,这沉重的电钻,无人机,还有无人机的遥控器,都比机器人本身重得多。

它最多能提起120牛顿的重物,大概有25斤,相当于机器人重量的120倍。
团队说,机器人的折纸结构,是从魔力球 (Magic Ball) 身上吸取了灵感。
伸展开来,就是圆润的球;收缩起来,变成了细长的身材:

有了多变的形态,机器人的动作就不受抓取角度的限制了;
物体形状不友好不要紧,质地柔软也不要紧,机器人会随着它们的样子去变形的。

团队试着让机器人抓取了12种食物 (包括苹果,此处未出镜) ;
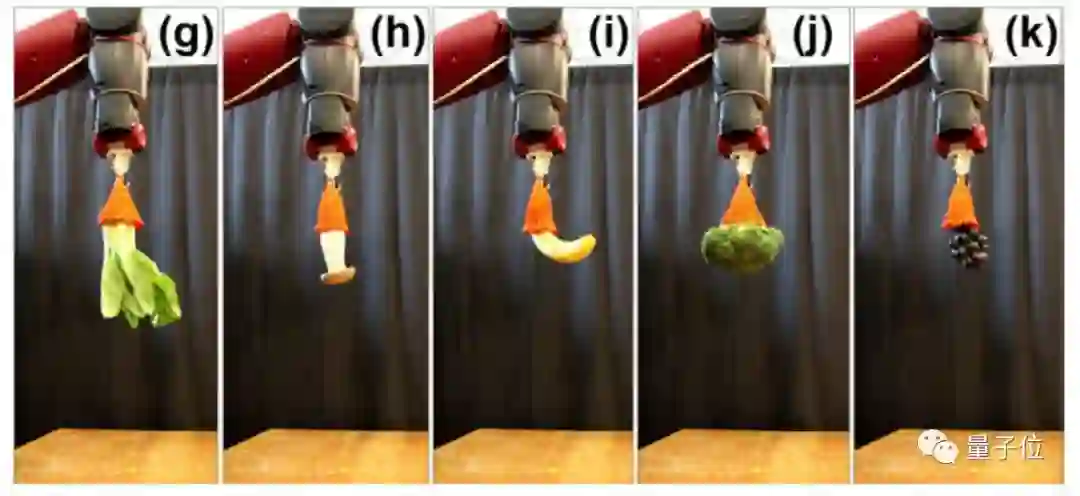
还有19种不同的杯杯瓶瓶罐罐。
有了气球和折纸结构优美的融合,这些全然不是难题。
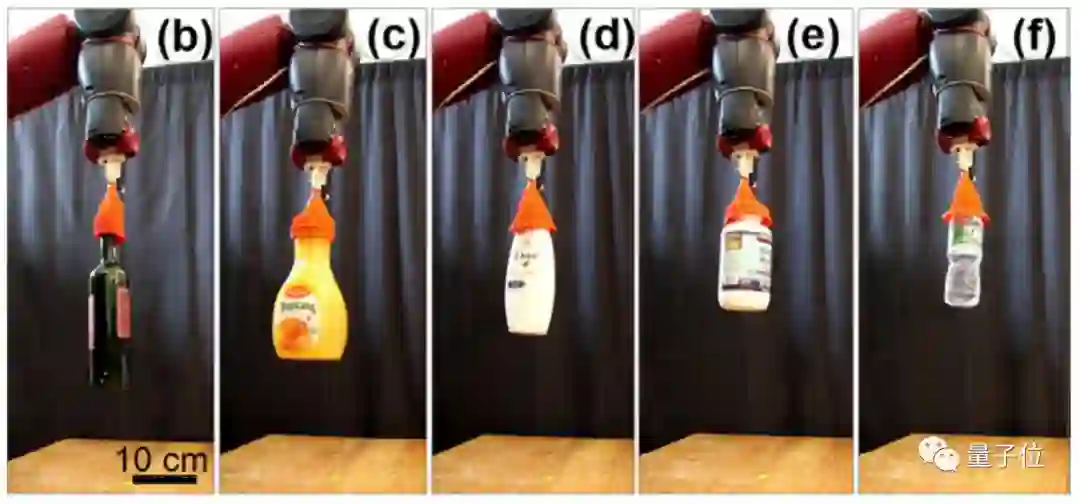
外柔内刚。这样的抓取,不论强度还是灵活度,几乎无可挑剔。
那些折纸机器人们
软体机器人的爸爸们,一向钟爱古老又神秘的纸艺。
并且,不止是用来抓取,运动能力也可以从中养成。
先看陆地上的运动:
蛇形走位
哈佛大学的研究人员,就曾经受到东瀛剪纸技法的召唤,模仿出蛇麟的原理,让机器人在伸缩中妖娆地前行。

往管子里注入空气,剪纸结构就会向前伸展,而“麟片”趁机抓紧地面;然后放气,结构便会向前收缩了。

机器人就在充气和放气的交替中,悠然地发生了位移。
水上运动
这里,是一艘折叠小船,能自己从陆地上开到水里,还能在水里自在地游。

这只机器人来自MIT,和气球机器人同属CSAIL实验室。
在套上“船”的外衣之前,它只有一个叫做引物 (Primer) 的核心。由磁场控制着,能翻滚,能跳跃:
引物跑到“小船”外衣的身上,原本平摊的外衣便受到了指引,折叠成一艘小船:
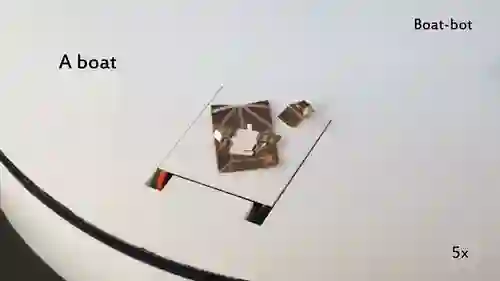
折叠完成之后,小船便能立刻向前滑行。
滑到水里,就有了最初看到的,水中航行的一幕。
当然,机器人也不是非要下水。它还有很多不同的外衣,支持各种姿势的陆上运动,比如变成轮子,开心地滚动起来:

悄悄说一句,还可以化身滑翔机。
上天下海,不管折纸还是剪纸机器人,精彩的栗子还有很多。未来,相信会有更多意想不到的操作。
MIT气球折纸机器人·论文传送门:
https://dspace.mit.edu/handle/1721.1/120930
— 完 —
订阅AI内参,获取行业资讯

诚挚招聘
量子位正在招募编辑/记者,工作地点在北京中关村。期待有才气、有热情的同学加入我们!相关细节,请在量子位公众号(QbitAI)对话界面,回复“招聘”两个字。

量子位 QbitAI · 头条号签约作者
վ'ᴗ' ի 追踪AI技术和产品新动态
喜欢就点「好看」吧 !




