如何区分并记住常见的几种 Normalization 算法
加入极市专业CV交流群,与6000+来自腾讯,华为,百度,北大,清华,中科院等名企名校视觉开发者互动交流!更有机会与李开复老师等大牛群内互动!
同时提供每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。点击文末“阅读原文”立刻申请入群~
作者:尹相楠
转载自知乎专栏:SIGAI
神经网络中有各种归一化算法:Batch Normalization (BN)、Layer Normalization (LN)、Instance Normalization (IN)、Group Normalization (GN)。从公式看它们都差不多,如 (1) 所示:无非是减去均值,除以标准差,再施以线性映射。

这些归一化算法的主要区别在于操作的 feature map 维度不同。如何区分并记住它们,一直是件令人头疼的事。本文目的不是介绍各种归一化方式在理论层面的原理或应用场景,而是结合 pytorch 代码,介绍它们的具体操作,并给出一个方便记忆的类比。
Batch Normalization
Batch Normalization (BN) 是最早出现的,也通常是效果最好的归一化方式。feature map: 
对其求均值和方差时,将在 N、H、W上操作,而保留通道 C 的维度。具体来说,就是把第1个样本的第1个通道,加上第2个样本第1个通道 ...... 加上第 N 个样本第1个通道,求平均,得到通道 1 的均值(注意是除以 N×H×W 而不是单纯除以 N,最后得到的是一个代表这个 batch 第1个通道平均值的数字,而不是一个 H×W 的矩阵)。
求通道 1 的方差也是同理。对所有通道都施加一遍这个操作,就得到了所有通道的均值和方差。具体公式为:


如果把
我们可以在 pytorch 下自己写一个 BN ,看看和官方的版本是否一致,以检验上述理解是否正确:
# coding=utf8
import torch
from torch import nn
# track_running_stats=False,求当前 batch 真实平均值和标准差,
# 而不是更新全局平均值和标准差
# affine=False, 只做归一化,不乘以 gamma 加 beta(通过训练才能确定)
# num_features 为 feature map 的 channel 数目
# eps 设为 0,让官方代码和我们自己的代码结果尽量接近
bn = nn.BatchNorm2d(num_features=3, eps=0, affine=False, track_running_stats=False)
# 乘 10000 为了扩大数值,如果出现不一致,差别更明显
x = torch.rand(10, 3, 5, 5)*10000
official_bn = bn(x)
# 把 channel 维度单独提出来,而把其它需要求均值和标准差的维度融合到一起
x1 = x.permute(1,0,2,3).view(3, -1)
mu = x1.mean(dim=1).view(1,3,1,1)
# unbiased=False, 求方差时不做无偏估计(除以 N-1 而不是 N),和原始论文一致
# 个人感觉无偏估计仅仅是数学上好看,实际应用中差别不大
std = x1.std(dim=1, unbiased=False).view(1,3,1,1)
my_bn = (x-mu)/std
diff=(official_bn-my_bn).sum()
print('diff={}'.format(diff)) # 差别是 10-5 级的,证明和官方版本基本一致Layer Normalization
BN 的一个缺点是需要较大的 batchsize 才能合理估训练数据的均值和方差,这导致内存很可能不够用,同时它也很难应用在训练数据长度不同的 RNN 模型上。Layer Normalization (LN) 的一个优势是不需要批训练,在单条数据内部就能归一化。
对于


继续采用上一节的类比,把一个 batch 的 feature 类比为一摞书。LN 求均值时,相当于把每一本书的所有字加起来,再除以这本书的字符总数:C×H×W,即求整本书的“平均字”,求标准差时也是同理。
如下代码对比了 pytorch 官方 API 计算 LN,和依据原理逐步计算 LN 得到的结果:
import torch
from torch import nn
x = torch.rand(10, 3, 5, 5)*10000
# normalization_shape 相当于告诉程序这本书有多少页,每页多少行多少列
# eps=0 排除干扰
# elementwise_affine=False 不作映射
# 这里的映射和 BN 以及下文的 IN 有区别,它是 elementwise 的 affine,
# 即 gamma 和 beta 不是 channel 维的向量,而是维度等于 normalized_shape 的矩阵
ln = nn.LayerNorm(normalized_shape=[3, 5, 5], eps=0, elementwise_affine=False)
official_ln = ln(x)
x1 = x.view(10, -1)
mu = x1.mean(dim=1).view(10, 1, 1, 1)
std = x1.std(dim=1,unbiased=False).view(10, 1, 1, 1)
my_ln = (x-mu)/std
diff = (my_ln-official_ln).sum()
print('diff={}'.format(diff)) # 差别和官方版本数量级在 1e-5Instance Normalization
Instance Normalization (IN) 最初用于图像的风格迁移。作者发现,在生成模型中, feature map 的各个 channel 的均值和方差会影响到最终生成图像的风格,因此可以先把图像在 channel 层面归一化,然后再用目标风格图片对应 channel 的均值和标准差“去归一化”,以期获得目标图片的风格。IN 操作也在单个样本内部进行,不依赖 batch。
对于


IN 求均值时,相当于把一页书中所有字加起来,再除以该页的总字数:H×W,即求每页书的“平均字”,求标准差时也是同理。
如下代码对比了 pytorch 官方 API 计算 IN,和依据原理逐步计算 IN 得到的结果:
import torch
from torch import nn
x = torch.rand(10, 3, 5, 5) * 10000
# track_running_stats=False,求当前 batch 真实平均值和标准差,
# 而不是更新全局平均值和标准差
# affine=False, 只做归一化,不乘以 gamma 加 beta(通过训练才能确定)
# num_features 为 feature map 的 channel 数目
# eps 设为 0,让官方代码和我们自己的代码结果尽量接近
In = nn.InstanceNorm2d(num_features=3, eps=0, affine=False, track_running_stats=False)
official_in = In(x)
x1 = x.view(30, -1)
mu = x1.mean(dim=1).view(10, 3, 1, 1)
std = x1.std(dim=1, unbiased=False).view(10, 3, 1, 1)
my_in = (x-mu)/std
diff = (my_in-official_in).sum()
print('diff={}'.format(diff)) # 误差量级在 1e-5Group Normalization
Group Normalization (GN) 适用于占用显存比较大的任务,例如图像分割。对这类任务,可能 batchsize 只能是个位数,再大显存就不够用了。而当 batchsize 是个位数时,BN 的表现很差,因为没办法通过几个样本的数据量,来近似总体的均值和标准差。GN 也是独立于 batch 的,它是 LN 和 IN 的折中。正如提出该算法的论文展示的:
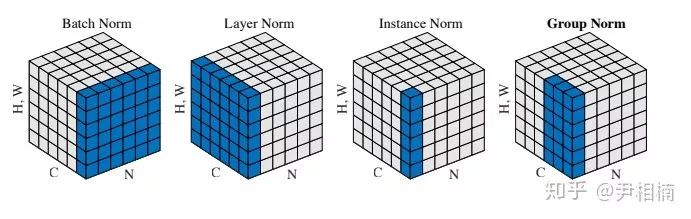
GN 计算均值和标准差时,把每一个样本 feature map 的 channel 分成 G 组,每组将有 C/G 个 channel,然后将这些 channel 中的元素求均值和标准差。各组 channel 用其对应的归一化参数独立地归一化。


继续用书类比。GN 相当于把一本 C 页的书平均分成 G 份,每份成为有 C/G 页的小册子,求每个小册子的“平均字”和字的“标准差”。
如下代码对比了 pytorch 官方 API 计算 GN,和依据原理逐步计算 GN 得到的结果:
import torch
from torch import nn
x = torch.rand(10, 20, 5, 5)*10000
# 分成 4 个 group
# 其余设定和之前相同
gn = nn.GroupNorm(num_groups=4, num_channels=20, eps=0, affine=False)
official_gn = gn(x)
# 把同一 group 的元素融合到一起
x1 = x.view(10, 4, -1)
mu = x1.mean(dim=-1).reshape(10, 4, -1)
std = x1.std(dim=-1).reshape(10, 4, -1)
x1_norm = (x1-mu)/std
my_gn = x1_norm.reshape(10, 20, 5, 5)
diff = (my_gn-official_gn).sum()
print('diff={}'.format(diff)) # 误差在 1e-4 级总结
这里再重复一下上文的类比。如果把
计算均值时,
BN 相当于把这些书按页码一一对应地加起来(例如:第1本书第36页,加第2本书第36页......),再除以每个页码下的字符总数:N×H×W,因此可以把 BN 看成求“平均书”的操作(注意这个“平均书”每页只有一个字)
LN 相当于把每一本书的所有字加起来,再除以这本书的字符总数:C×H×W,即求整本书的“平均字”
IN 相当于把一页书中所有字加起来,再除以该页的总字数:H×W,即求每页书的“平均字”
GN 相当于把一本 C 页的书平均分成 G 份,每份成为有 C/G 页的小册子,对这个 C/G 页的小册子,求每个小册子的“平均字”
计算方差同理。
此外,还需要注意它们的映射参数 

最后,BN 和 IN 可以设置参数: momentum 和 track_running_stats来获得在全局数据上更准确的 running mean 和 running std。而 LN 和 GN 只能计算当前 batch 内数据的真实均值和标准差。
-完-
*延伸阅读
点击左下角“阅读原文”,即可申请加入极市目标跟踪、目标检测、工业检测、人脸方向、视觉竞赛等技术交流群,更有每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流,一起来让思想之光照的更远吧~

△长按关注极市平台
觉得有用麻烦给个在看啦~



