【自动化】详解PID调节的基本概念、参数与调试方法,清晰易懂!
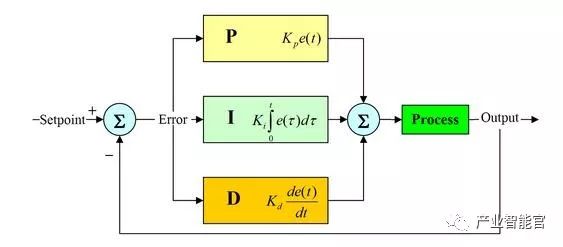
PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、 积分、微分计算出控制量进行控制的。PID控制器的参数整定是控制系统设计的核心内容!
如果你从来没有接触过PID,看完这篇文章你就会明白PID控制到底是怎么回事了!
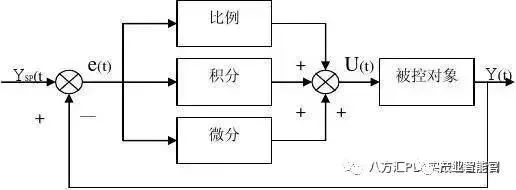
PID是比例、积分、微分的简称,PID控制的难点不是编程,而是控制器的参数整定。参数整定的关键是正确地理解各参数的物理意义。
1. 比例控制
比例控制是最常用的控制手段之一,比方说我们控制一个加热器的恒温100度,当开始加热时,离目标温度相差比较远,这时我们通常会加大加热,使温度快速上升,当温度超过100度时,我们则关闭输出,通常我们会使用这样一个函数
e(t) = SP – y(t)-
u(t) = e(t)*P
SP——设定值
e(t)——误差值
y(t)——反馈值
u(t)——输出值
P——比例系数
比例控制的比例系数如果太小,即调节后的电位器转角与位置L的差值太小,调节的力度不够,使系统输出量变化缓慢,调节所需的总时间过长。比例系数如果过大,即调节后电位器转角与位置L的差值过大,调节力度太强,将造成调节过头,甚至使温度忽高忽低,来回震荡。
增大比例系数使系统反应灵敏,调节速度加快,并且可以减小稳态误差。但是比例系数过大会使超调量增大,振荡次数增加,调节时间加长,动态性能变坏,比例系数太大甚至会使闭环系统不稳定。
单纯的比例控制很难保证调节得恰到好处,完全消除误差。
2.积分控制
PID控制器中的积分对应于图1中误差曲线与坐标轴包围的面积(图中的灰色部分)。PID控制程序是周期性执行的,执行的周期称为采样周期。计算机的程序用图1中各矩形面积之和来近似精确的积分,图中的TS就是采样周期。
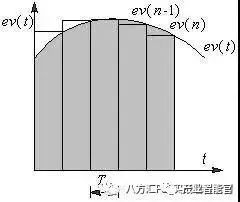
PID控制器输出中的积分部分与误差的积分成正比。因为积分时间TI在积分项的分母中,TI越小,积分项变化的速度越快,积分作用越强。
3.PI控制
如果控制器有积分作用(例如采用PI或PID控制),积分能消除阶跃输入的稳态误差,这时可以将比例系数调得小一些。
如果积分作用太强(即积分时间太小),相当于每次微调电位器的角度值过大,其累积的作用会使系统输出的动态性能变差,超调量增大,甚至使系统不稳定。积分作用太弱(即积分时间太大),则消除稳态误差的速度太慢,积分时间的值应取得适中。
4.微分作用
误差的微分就是误差的变化速率,误差变化越快,其微分绝对值越大。误差增大时,其微分为正;误差减小时,其微分为负。控制器输出量的微分部分与误差的微分成正比,反映了被控量变化的趋势。
有经验的操作人员在温度上升过快,但是尚未达到设定值时,根据温度变化的趋势,预感到温度将会超过设定值,出现超调。于是调节电位器的转角,提前减小加热的电流。这相当于士兵射击远方的移动目标时,考虑到子弹运动的时间,需要一定的提前量一样。
5.采样周期
6.PID参数的调整方法
在整定PID控制器参数时,可以根据控制器的参数与系统动态性能和稳态性能之间的定性关系,用实验的方法来调节控制器的参数。有经验的调试人员一般可以较快地得到较为满意的调试结果。在调试中最重要的问题是在系统性能不能令人满意时,知道应该调节哪一个参数,该参数应该增大还是减小。
为了减少需要整定的参数,首先可以采用PI控制器。为了保证系统的安全,在调试开始时应设置比较保守的参数,例如比例系数不要太大,积分时间不要太小,以避免出现系统不稳定或超调量过大的异常情况。给出一个阶跃给定信号,根据被控量的输出波形可以获得系统性能的信息,例如超调量和调节时间。应根据PID参数与系统性能的关系,反复调节PID的参数。
7.PID校正网络分析
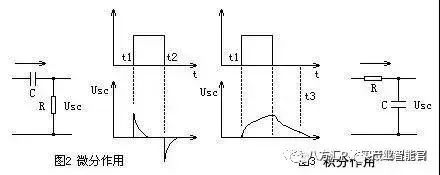
微分:
从电学原理我们知道,见图2,当脉冲信号通过RC电路时,电容两端电压不能突变,电流超前电压90°,输入电压通过电阻R向电容充电,电流在t1时刻瞬间达到最大值,电阻两端电压Usc此刻也达到最大值。随着电容两端电压不断升高,充电电流逐渐减小,电阻两端电压Usc也逐渐降低,最后为0,形成一个锯齿波电压。这种电路称为微分电路,由于它对阶跃输入信号前沿“反应”激烈,其性质有加速作用。
积分:
我们再来看图3,脉冲信号出现时,通过电阻R向电容充电,电容两端电压不能突变,电流在t1时刻瞬间达到最大值,电阻两端电压此刻也达到最大值。电容两端电压Usc随着时间t不断升高,充电电流逐渐减小,最后为0,电容两端电压Usc也达到最大值,形成一个对数曲线。这种电路称为积分电路,由于它对阶跃输入信号前沿“反应”迟缓,其性质是“阻尼”缓冲作用。
PID控制器参数整定的一般方法:
现在一般采用的是临界比例法。利用该方法进行 PID控制器参数的整定步骤如下:(1)首先预选择一个足够短的采样周期让系统工作;(2)仅加入比例控制环节,直到系统对输入的阶跃响应出现临界振荡,记下这时的比例放大系数和临界振荡周期;(3)在一定的控制度下通过公式计算得到PID控制器的参数。
在PID参数进行整定时如果能够有理论的方法确定PID参数当然是最理想的方法,但是在实际的应用中,更多的是通过凑试法来确定PID的参数。
深度理解PID算法
PID控制器调节输出,保证偏差(e)为零,使系统达到稳定状态。偏差(e)是设定值(SP)和过程变量(PV)的差。PID控制的原理基于下面的算式;输出M(t)是比例项、积分项和微分项的函数。

其中:
M (t) 是作为时间函数的回路输出
K C 是回路增益
e 是回路误差(设定值和过程变量之间的差)
M initial 是回路输出的初始值
为了能让数字计算机处理这个控制算式,连续算式必须离散化为周期采样偏差算式,才能用来计算输出值。数字计算机处理的算式如下:

其中:
M n 是在采样时刻n,PID回路输出的计算值
K C 是回路增益
e n 是采样时刻n的回路误差值
e n -- 1 是回路误差的前一个数值(在采样时刻n--1)
e x 是采样时刻x的回路误差值
K I 是积分项的比例常数
M initial 是回路输出的初始值
K D 是微分项的比例常数
从这个公式可以看出,积分项是从第1个采样周期到当前采样周期所有误差项的函数。微分项是当前采样和前一次采样的函数,比例项仅是当前采样的函数。在数字计算机中,不保存所有的误差项,实际上也不必要。
由于计算机从第一次采样开始,每有一个偏差采样值必须计算一次输出值,只需要保存偏差前值和积分项前值。作为数字计算机解决的重复性的结果,可以得到在任何采样时刻必须计算的方程的一个简化算式。简化算式是:

其中:
M n 是在采样时间n时,回路输出的计算值
K C 是回路增益
e n 是采样时刻n的回路误差值
e n -- 1 是回路误差的前一个数值(在采样时刻n--1)
K I 是积分项的比例常数
MX 是积分项的前一个数值(在采样时刻n -- 1)
K D 是微分项的比例常数
CPU实际使用以上简化算式的改进形式计算PID输出。这个改进型算式是:

其中:
Mn 是在采样时间n时的回路输出的计算值
MP n 是在采样时间n时回路输出比例项的数值
MI n 是在采样时间n时回路输出积分项的数值
MDn 是在采样时间n时回路输出微分项的数值

工业互联网
产业智能官 AI-CPS
加入知识星球“产业智能研究院”:先进产业OT(工艺+自动化+机器人+新能源+精益)技术和新一代信息IT技术(云计算+大数据+物联网+区块链+人工智能)深度融合,在场景中构建状态感知-实时分析-自主决策-精准执行-学习提升的机器智能认知计算系统;实现产业转型升级、DT驱动业务、价值创新创造的产业互联生态链。

版权声明:产业智能官(ID:AI-CPS)推荐的文章,除非确实无法确认,我们都会注明作者和来源,涉权烦请联系协商解决,联系、投稿邮箱:erp_vip@hotmail.com。



