严新平院士:智能交通发展的现状、挑战与展望
文 / 严新平,褚端峰,刘佳仑,蒋仲廉,贺宜;转载“中国人工智能学会”
摘 要
介绍了国内外智能交通在运载工具和交通系统两方面的发展现状;提出了人工智能目前技术水平难以满足智能交通发展需求、智能系统可靠性验证亟需完善以及面向智能车船系统的法规标准体系亟待构建等三方面智能交通发展的技术挑战;展望了智能交通的未来方向。
关键词
关键词:智能交通;人工智能;智能汽车;智能船舶;自主式交通系统
简介

0 引言
当今世界正经历百年未有之大变局,交通系统正在新一轮科技革命推动下发生深刻变革。但是,当前的交通系统仍然存在交通安全、交通效率和节能减排三大问题。
• 交通安全提升仍需努力。公安部交通管理局发布的《道路交通事故统计年报》显示,2019年,我国道路交通事故1247.3万起,死亡62763人,受伤256101人,直接财产损失13.5亿元。从世界范围内对比来看,在道路交通事故死亡人数和万车死亡率方面,我国与发达国家仍有较大差距(见图1)。

• 交通系统运行效率尚待提高。在道路与水路交通运输方面,我国存在城市道路交通拥堵常态化、高速公路节假日拥堵加剧、内河航道利用率有待提高等诸多问题。滴滴出行发布的《城市交通出行报告》显示,2021年第一季度,我国主要城市的道路交通拥堵时长在1小时以上,道路交通峰时平均速度低于40km/h(见图 2)。

• 交通系统节能减排任重道远。2019年,我国交通运输行业碳排放量达到11.4亿吨,占全国排放总量的11%。公路、水运、铁路、航空是交通领域碳排放主要来源,其中,公路运输碳排放占比86.76%,是排放最高的运输方式。我国交通运输处于较快的发展阶段,交通运输行业碳排放量仍在快速增长,在2008—2018年间,我国交通运输行业碳排放的复合增长率高达7.5%,显著高于世界交通运输行业碳排放的平均增速2.3%与我国整体碳排放的增速5.6%(见图3)。

上述三大问题是交通运输行业面临的艰巨任务,智能交通为解决这些问题带来了契机。当前,智能交通采用“智联网联、协同优化”方式大幅提升交通安全和效率。未来,通过交通融合一体化发展,推动未来交通系统的“智慧绿色、安全高效、融合一体、自主无人”,达到“零死亡、零排放、碳中和”的交通愿景。
1 发展现状
智能交通的发展涉及到运载工具、交通基础设施、光电子信息、互联网等多个行业与技术领域的交叉、融合,其大规模应用离不开多个行业和部门的联动。近年来,随着物联网、大数据、人工智能等新兴技术的大力推动,智能交通系统有了长足发展。
1.1 运载工具
1.1.1 智能汽车发展现状
汽车智能驾驶是智能交通非常活跃的一个发展方向。目前,汽车正处在由“功能汽车”到“智能网联汽车”“自动驾驶汽车”的进程中。美国特斯拉作为汽车空中下载(Over The Air, OTA)技术的先驱,率先让汽车可以像智能手机一样在云端进行系统升级。国内百度“Apollo 平台”,通过向汽车行业及自动驾驶领域的合作伙伴提供一个开源、开放、完整的软件平台,打造类似于智能手机Android平台的智能汽车生态。
自动驾驶是智能汽车发展的高级阶段,是当今智能交通领域最前沿的研究方向。自动驾驶系统主要利用各种车载传感器,如计算机视觉、激光雷达、毫米波雷达、全球卫星导航系统(Global Navigation Satellite System,GNSS)、惯性测量单元(Inertial Measurement Unit,IMU)等,获取车辆周边的环境信息,基于信息融合方法,对采集到的交通环境与行车状态等原始信息进行精确认知;再通过智能决策规划方法,为自动驾驶汽车规划出安全、高效的预期轨迹与速度;最后通过对自动驾驶汽车进行纵横向运动控制,自动调节油门、刹车、档位和转向等,实现预期轨迹与速度的实时跟踪,从而使汽车能够安全、高效行驶。
理想的自动驾驶系统应该像熟练的人类驾驶员一样,能对车辆运动及环境变化做出准确的判断,实时地改变车辆运动,完成驾驶任务。然而,限于自动驾驶在感知、融合、决策、规划、控制等多方面的技术难题,以及成本、可靠性等方面的束缚,当前,大规模量产的智能汽车仍处于L2级及以下的驾驶辅助阶段,L3级及以上的自动驾驶仍未跨越。
当前,甚至未来较长一段时间内,普通开放道路中的自动驾驶技术可能仍难以大规模商用。但是,在一些特定场景中的自动驾驶正在逐步规模化应用,例如,港区集装箱运输、矿区货物运输和农业机械等,无人化的自动驾驶技术,变革了它们原有的低效、繁重、高成本的工作模式,显著提升了运营效率和经济性。
港区集装箱运输为半封闭式的低速自动驾驶运营模式,是自动驾驶率先商用的典型场景之一。交通运输部等九部门联合印发的《关于建设世界一流港口的指导意见》提出,到2025年,部分沿海集装箱枢纽港初步形成全面感知、泛在互联、港车协同的智能化系统。目前,国内应用自动驾驶进行集装箱运输的港口主要包括上海港、青岛港、天津港、宁波舟山港等。
采矿业是我国国民经济的基础和支柱产业,用工难、运输成本上升是推动矿山智慧化的主要因素,因而矿区自动驾驶具有典型的代表意义。国外矿区自动驾驶的主要代表是卡特彼勒、小松、日立等。其中,卡特彼勒和小松已进入商用阶段。国内矿山自动驾驶发展相对较晚,但技术更新和应用较快,三一重工、徐工、航天重工等在白云鄂博矿、哈尔乌素煤矿、城门山铜矿等开展了规模应用,取得了良好效果。
1.1.2 智能船舶发展现状
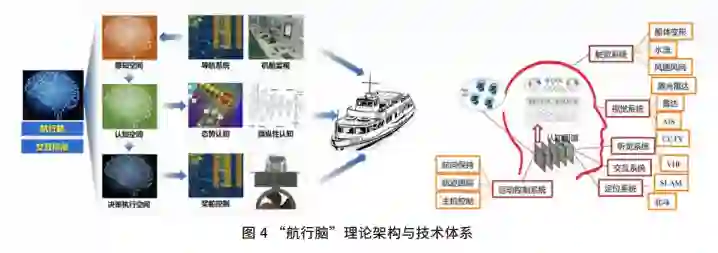
智能船舶作为未来航运的载体,其自身发展需突破船舶感知、认知、决策、执行、测试等多个维度的关键技术,实现船舶由小到大、由内河到外海、由近海到远海逐步智能化、自主化的发展。武汉理工大学提出“航行脑”系统技术体系与理论架构(见图4),即利用一套由人工智能系统构建的“机器脑”替代传统驾控人员的“大脑”,实现对船舶的自主驾控。目前,智能船舶仍然处在研发过程中,“航行脑”系统是面向智能船舶的人工智能系统,由感知、认知、决策和执行等功能空间组成,逐步促进传统船舶驾驶向增强驾驶、辅助驾驶、远程驾驶、自主驾驶等不同功能阶段演进。
船舶的智能化等级可分为L0~L5级的6个阶段。目前,智能船舶应用还处于辅助驾驶阶段,要实现自主航行,还有很长的路要走。随着人工智能和大数据等高新技术的进步,通过与新基建建设同步、与水路运输模式和航运转型发展结合,未来智能船舶的远程遥控、人机共驾、网联协同和自主航行等功能会日臻完善。
船岸协同是智能船舶发展非常重要的一个理念。船岸协同由岸端与船端系统构成,是实现智能船舶实际运营的应用基础。日本、欧盟等发达国家和地区都开展了这方面的探索和实验。日本国土交通省拖轮远程驾驶项目借助拖轮配备传感器和摄像设备,实时监测航行态势,通过船岸协同与试验船舶建立信息共享,实现协同控制。比利时SEAFAR驳船远程驾驶项目融合船侧 / 基础设施侧多源信息,实现协同感知,远程实时分析船舶动态,进行船舶集中管理和操作。我国在这方面也开展了积极探索,“筋斗云 0 号”小型无人货船项目于2019年12月在珠海顺利完成远程遥控和自主航行试验。“智飞号”智能航行集装箱运输商船于2021年10月安装我国自主研发的智能航行系统,具有人工驾驶、远程遥控驾驶和无人自主航行三种驾驶模式。
在船舶辅助驾驶方面,国内首艘应用人工智能并投入实际营运的汽渡船舶,搭载了基于“航行脑”架构开发的“汽渡智能辅助驾驶系统”,可实现两大功能:① 船端智能感知,通过融合雷达和AIS数据实现对水中动静态障碍物的识别,增强了夜航、雾航、雨天等不良自然条件下的感知能力;② 岸基智能监管,可对航行船只和监管水域实现全程监控、远程监控。
1.2 交通系统
1.2.1 道路交通系统
道路交通系统是由汽车、道路/运输基础设施、信息和人组成的一个共同实现客货运输的系统。该系统包括自然与人造、实体与概念、静态和动态及控制和行为等系统,衍生到城市大脑、智慧城市、全息交通感知等应用场景。
目前,国内外都在积极探索道路交通系统的智能化,国内比较典型的是“阿里云城市大脑系统”,其包括城市交通治理解决方案、智慧交通运输综合解决方案、智慧停车综合解决方案、智慧城管解决方案、智慧应急综合解决方案,以及政务数据中台等多个解决方案。城市大脑系统是整个城市的智能中枢,可对城市进行全局实时分析,利用城市的数据资源优化调配公共资源,最终将进化成能够治理城市的超级智能。
华为智慧城市平台是结合了人工智能、物联网、大数据、地理信息系统、视频、云、融合通信和安全的一个综合性应用系统。它的两大关键能力是面向城市交通的关键业务场景,为生态伙伴提供差异化价值。
武汉理工大学自主研发了全息道路交通感知系统,包括利用仿真系统对交通基础设施的安全性进行评价;在道路交通基础设施建设过程中预设光纤传感器,利用光纤传感器实时获取道路交通流状况和路面变化信息;利用路侧和路面的交通基础设施提供有关信息,为行车安全提供更好的支持和服务。如图5所示,该系统包括道路系统运行仿真系统、智慧公路模拟系统和智慧公路全息感知决策控制平台等。

1.2.2 智慧海事监管系统
根据世界海事大学《交通2040:自动化、科技、就业 - 未来工作》报告预测,在2040年前后,有人监控下的自主船舶将达到15%左右,包括未来搭载了不同智能功能的船舶,比如智能货物管理、智能船体、智能集成信息平台等,也包括安全辅助驾驶和在开阔水域控制等高级自主功能。
瑞士的海区整体监管系统(Maritime Area Integral Supervision, MAIS)建立了一系列集成各种技术的信息层,以监控海区中船舶作业的授权情况,更好地对辖区内船舶进行管理和控制。MAIS可以帮助港口禁区、生物保护区和渔场防止入侵者和非法捕鱼。
我国也在积极开发航运系统的智能管控平台。江苏段航运系统智能管控平台基于江苏海事全要素感知云服务数据中心,构建了水路交通场景数字化平行仿真模型,具备推演预测多尺度条件下的交通流态势,可及时动态调整资源分配实现通航要素的干预,致力于由“人盯死守”的传统海事监管方式向以智慧管理为核心的现代管控服务转变。
2 技术挑战
尽管人工智能技术在交通运输工程领域的一些典型场景得到了工程应用,但是目前仍然面临巨大的技术挑战 , 主要体现在:人工智能目前技术水平还难以满足智能交通发展的需求;智能交通系统的可靠性有待验证;智能交通系统法规标准体系尚需建立和完善。
2.1 人工智能技术发展水平
近年来,得益于大数据、深度学习的大力推动,人工智能在单一的抽象博弈智能层面克服了人类社会的“知识积累性壁垒”局限,通过在规则活动中构建系统严谨的认知模式,在包括交通、机械等领域大规模应用,深刻影响了人们的工作和生活模式。
2016年,特斯拉CEO马斯克表示,汽车在任何路况上进行自动驾驶的能力在两年内就可以实现;到2021 年,马斯克又表示,通用自动驾驶是一个如此难的任务,因为要去解决很大一部分现实世界的AI问题。事实也是如此,当前的智能决策技术在面对复杂的驾驶任务时,离人类驾驶水平还有很大差距。
2.2 智能系统的可靠性验证
统计数据显示,特斯拉从2013年起发生交通事故218起,造成14人死亡,82人受伤;谷歌报告显示在14个月测试中,智能汽车总共“主动脱离自动驾驶状态”272 次,69次选择取消自动驾驶状态。快速、有效、准确的系统可靠性测试和评估技术是保证智能系统发挥核心功能,降低系统不可预知风险的重要前提。智能交通系统的可靠性研究已得到国内外学者的广泛关注。
首批试驾谷歌智能汽车的美国Medium科技总编 Steven Levy表示,“无人驾驶汽车的大规模应用,我们现在也许到了95%,但最后的5%将会是漫长的路途”。在自动驾驶领域,特殊天气条件下的部分感知信息缺失、特殊路段的部分传感器不稳定等不常见驾驶场景导致的“长尾问题”,限制了自动驾驶的可靠性及其量产应用,亟待提出完善的可靠性验证手段予以解决。
以船舶智能系统的可靠性验证为例,其测试验证方法体系尚处于构建阶段。考虑到船舶自身的高价值属性、实船测试的风险性、模型试验的尺度效应等因素,智能船舶测试验证以虚拟测试为主、模型测试为辅;构建“人-船-环境”精细化模型,是提升虚拟测试精度的重要途经。因此,如何兼顾智能系统测试的可靠性和高效性、典型测试工况和极端事件场景,是智能船舶测试验证方法体系发展中需要重点思考的问题。
2.3 智能车辆和智能船舶的法规标准体系
近年来,智能车辆和智能船舶的关键技术取得了长足进步,但配套的法规标准体系研究仍然面临巨大挑战。智能车辆和智能船舶在运行中形成了“现实层-数据层-知识层-现实层”的闭环,由于智能车辆和智能船舶的不确定性导致的安全问题,对传统交通责任体系将产生重大冲击,面临人工智能伦理规范挑战。
3 未来展望
智能交通系统的未来愿景是自主式交通系统,由智能运载工具、智慧基础设施和云端智能交通控制等组成,这一系统在没有足够的人类监督情况下,可在变化的、不可预测的交通环境中“理性行动”,或能在经验中学习,利用数据提升系统性能。自主式交通系统具有感知、交互、学习和执行能力,是一种具备单体智能、群体协同和整体优化的交通系统。
(参考文献略)
专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“智能交通” 就可以获取《智能交通专知资料大全》专知下载链接

请扫码加入专知人工智能群(长按二维码),或者加专知小助手微信(zhuanzhi02),加入专知主题群(请备注主题类型:AI、NLP、CV、 KG、论文等)交流~






