Momenta完全无人驾驶首次曝光!城区道路混行无接管,遭遇逆行也不怕,特斯拉Waymo路线二合一
李根 发自 苏州北站正南
量子位 报道 | 公众号 QbitAI
Momenta(现在)是一家怎样的公司?
宏观印象:学霸创业、中国无人车独角兽、奔驰母公司戴姆勒加持、自动驾驶第一梯队玩家……
产品业务:高速场景方案产品、L4级自主泊车产品交货、最高等级高精度地图资质……
一千个维度有一千种答案,但也颇显盲人摸象。
只是从今往后,Momenta的技术路径开始完整清晰。
在通往自动驾驶实现大道上,之前有渐进式的特斯拉,也有一步到位的Waymo,天下方案,莫过于此。
而现在,Momenta集二者之所长,避二者之所短:
Tesla+Waymo,就是Momenta。

完全无人驾驶发布
12月26日,Momenta对外正式发布L4级无人驾驶技术MSD (Momenta Self Driving),开始支持城市内完全无人驾驶场景。
如果说2019年来Momenta发布的前装量产产品Mpilot,更像是特斯拉方案。
那么现在,MSD上马,则显出Waymo路线雄心。
万万没想到,自动驾驶业内一度纷争的两种路线,如今让Momenta实现二合一。
但MSD究竟是一套怎样的方案?
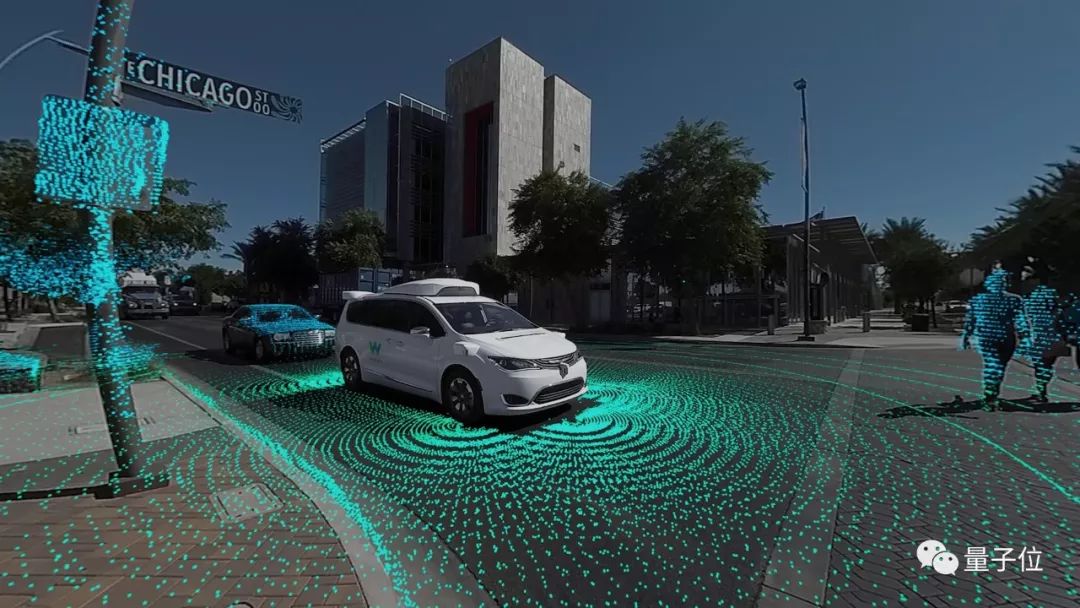
区别于量产前装方案,Momenta完全无人驾驶方案中最明显不同在于多了激光雷达。

在其测试车中,共搭载12个摄像头,5个毫米波雷达和1个激光雷达。整套系统传感器方案以摄像头为主,激光雷达为辅,多传感器冗余。
而且Momenta强调,除去激光雷达,方案中的硬件选型与前装量产保持一致——这也是Momenta“两条腿”向前的关键考量,后面还会详细讲到。
不过,说一千道一万,无人驾驶——还得以身试乘看一看。

MSD方案的试乘,选在了Momenta(苏州),地点毗邻苏州高铁北站,属城建频繁区域,路线全程约12公里,沿途经过30余个红绿灯路口:
既包括无保护左转等典型场景,也有非机动车混行、立交桥下长路口等复杂路段。
路线中还有多处工地,也有学校、居民区、写字楼、商业中心等生活场景。
符合Momenta该方案目标所指:城市区间内,完全无人驾驶。
而且路段基础设施也没有过V2X改造,依然拼的是单车智能实力。
试乘中最基本的场景自然是购物中心附近的行人:

以及在高铁站停车场附近的无保护左转:

车流交汇交互,也是最有意思的场景。MSD方案虽初发布,但智能程度已有老司机风范,在试乘的几次交互场景中,有让行、也有选择先过,并不基于单一规则。
同车试乘的Momenta研发总监夏炎解释,这能体现MSD在预测规划方面的实力和学习能力。
不过整体试乘而言,因为城市区间不同高速场景(无人车混行)和停车场(低速),Momenta的AI司机给人的印象是:安全第一,宁怂不偏激。
比如在苏州相城道路,会出现不规则的异型车——挑战自动驾驶系统的感知识别。
甚至遭遇违章逆行情况:
其实从当天道路实际情况来看,系统完全可以“偏激”一些,让路不减速通过。
但安全第一思考下,Momenta工程师打造的该系统,在交通中不确定性较大的情况下,先减速,甚至刹车,确保交互双方的安全。
而且相比人类老司机,MSD虽初生牛犊,但也展现出不凡实力。
遭遇人类司机深为苦恼的大货车时,既要对大货车的载货品类多样、形态各异准确感知,还要对大货车行为上的激进行为有应对:
MSD跟随慢速行驶的大货车一段时间后,“决定”变道超车,但在超车过程中仍保持对货车一定的安全距离,通过接近路口的实白线后才拉大横向距离超车,保证了超车过程中的安全性。

完全无人驾驶新速度
12公里左右里程,按道路交规限速行驶(40公里每小时为主),近40分钟,历经城区内各种场景——有临时施工、有不规则车辆,还有逆行,但全程无接管。
这样的完全自动驾驶能力,起步最早的谷歌用了近十年,百度从开始研发到落地也超过5年,一众自动驾驶新势力从无到有也走过了快3年……

虽然深度学习、大数据和大计算带来的指数加速,已再明显不过。
但得知Momenta的速度,依然让人不可思议:
50人左右的团队,5个月左右的时间。
没错,从今年下半年交货量产自动驾驶产品后,Momenta才开始囤积重兵,依靠公司长期的技术和数据积累,以及量产自动驾驶和完全无人驾驶通用的平台支持,开始攻坚完全无人驾驶。
至于能够达到城区开放道路全程无接管,之前行业内最快的友商也差不多用时1年,且积累了至少十万公里以上实际路测里程。

所以Momenta之速,背后究竟有“引擎”?
Momenta CEO曹旭东认为,与他们内部看问题的角度、方法和战略选择有关。
Momenta创办,从一开始就明确目标,要打造自动驾驶大脑。

这并非传统汽车产业内“换轮子”,而是行业开始AI化变革后,供应链环节中的新机会。
汽车产业链中:
有最基础的Tier1一级供应商,如博世、大陆,在系统层面、硬件层面提供产业支持。
再往上则是OEM厂商,奔驰、宝马、丰田……即车厂。
还有智能化的基础——计算芯片,如TI、NXP、瑞萨和英伟达。
最后,核心新增的玩家,一方面是提供出行网络的滴滴Uber等,另一方面则是提供自动驾驶所需核心算法和软件的技术公司。
比如定位“自动驾驶大脑”的Momenta,就处于这一层。
但即便如此,如何实现完全自动驾驶,如何最高效拥抱未来,也没有清晰明确的答案。
至少在打造自动驾驶大脑这件事上,特斯拉方案和Waymo路线一度不可调和。

两个路线的争论
所谓特斯拉路线,是按照自动驾驶等级的划分,从低级往高级不断升维,通过量产汽车对场景、数据和算法的迭代,最终实现完全无人驾驶。
而且正是因为坚定量产路线,也为了最低门槛获取数据、场景和功能反馈,偏执狂马斯克完全依靠摄像头方案、不使用价格昂贵的激光雷达。
所以即便2019年发布为完全自动驾驶而生的FSD硬件,外界也不相信马斯克2020百万RoboTaxi的豪言。
而Waymo路线,则认为只有从一开始L4才能实现RoboTaxi。该路线中,人机共驾的高级辅助驾驶被认为有天然Bug——既要机器辅助驾驶,又要人类在紧急时刻接管,显然不靠谱。
于是Waymo从2009年正式推动后,逐渐明确了实现方式:
原型车、规模化路测、在丰富场景中不断迭代,区域内落地,终极场景是让无人车行驶运营在任何时间、任何地点和任何场景。
但Waymo路线中,最难的是无穷无尽的“长尾”问题,现实中总会有出乎预料的新场景、特殊挑战,这就要求自动驾驶系统足够聪明、且学习迭代得足够快。
所以概括而言,二者优缺点都很明显。
特斯拉方案:想依靠低成本传感器方案不断升维,难且有道德挑战;但好处是数据“众包”,能在量产中获得现金流和数据流。
Waymo路线:希望一己之力不断扩大无人车队规模,最终真正实现完全落地,险且依赖融资烧钱;而好处是安全性相较而言更可控,不用把车主当小白鼠。
但如今Momenta之行动,所谓“两条腿”战略,却实现了特斯拉和Waymo路线的二合一。
重新定义了实现无人驾驶的关键路径。
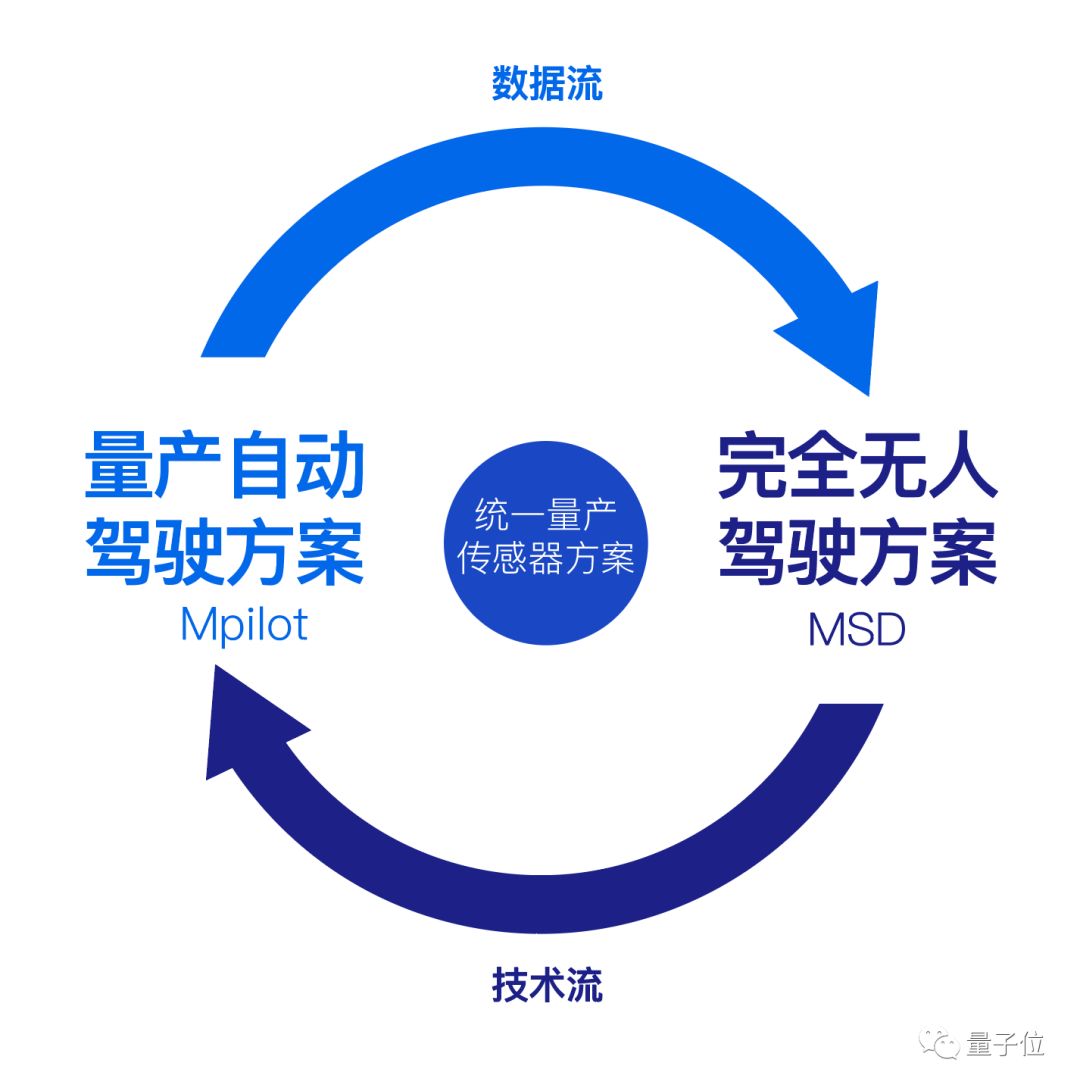
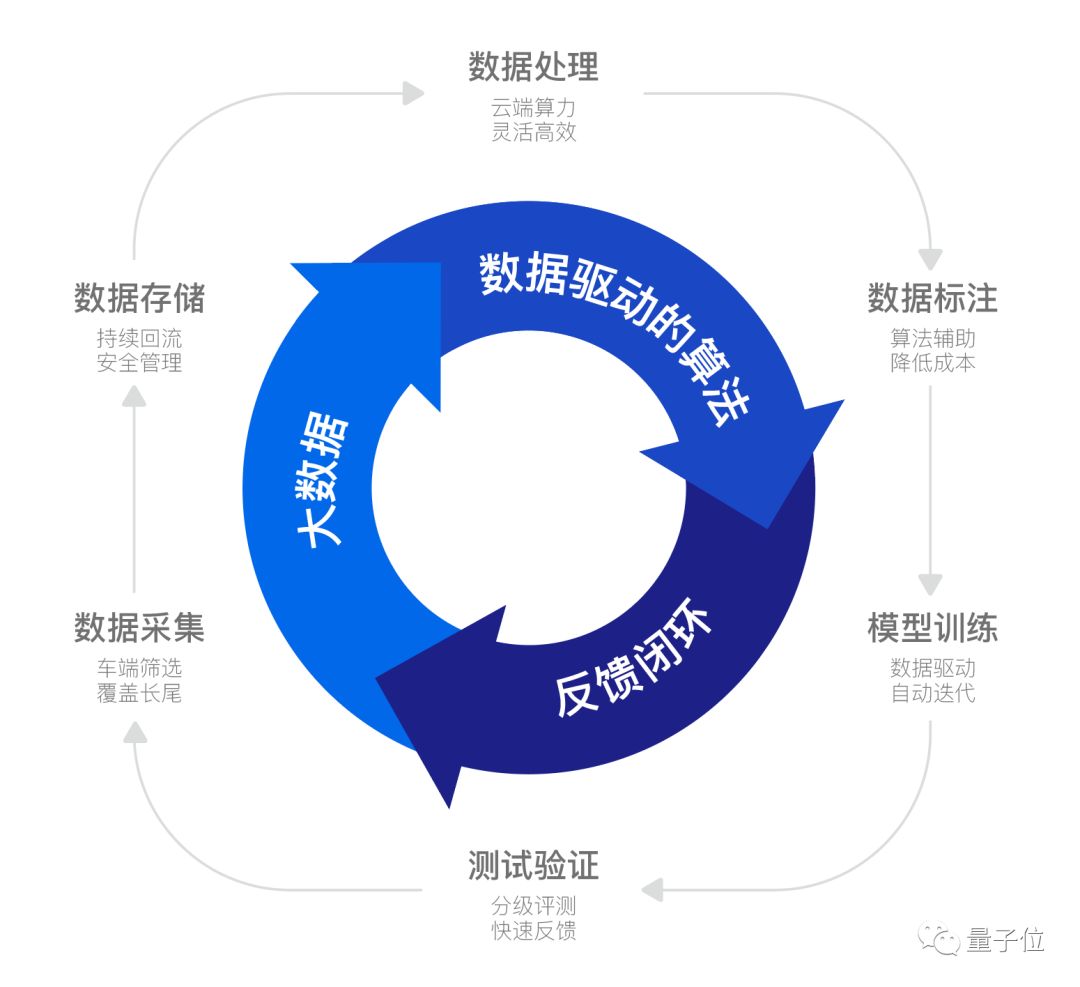
即,通过量产自动驾驶产品获得海量数据,持续研发数据驱动的核心算法,打造闭环自动化工程体系,发挥数据价值,高效迭代技术,最终实现完全无人驾驶。
同时,MSD的技术框架中不同传感器的感知算法相互独立冗余,并非完全依赖某一种传感器,因此目前量产传感器收集的数据,如视觉、地图、轨迹数据等可以无缝应用并有效助力MSD算法提升。
最终,一个数据流和技术流的闭环搭建完成,量产自动驾驶和完全无人驾驶,真正互相补益。
但为何能打通?又为什么是Momenta?
一切要从Momenta创立之初对自动驾驶的认知说起。
终局视角思考无人车
Momenta 2016年创办,当时就分析过特斯拉模式和Waymo路线。
但并非为结合二者而生。
曹旭东回忆,从一开始就希望从本质出发、从终局角度思考问题。
Momenta的思考中,自动驾驶的终局,一定是L4级以上,不需要方向盘、不需要人类司机。
但要实现这个终局,结合深度学习为核心的AI新浪潮,两大要素就格外关键:
一是数据驱动。
二为海量数据。
之所以要数据驱动,是因为完全无人驾驶中的长尾问题——几乎是难以穷尽的。
唯一的可能性只有数据驱动,自动化解决大部分的问题,例如99%问题。
所以Momenta内部,“架构师”文化兴盛,他们目标是架构能够自动化解决问题的系统。
在当前系统中,Momenta的 “闭环自动化”方法论就已发挥作用,通过建立对问题自动化发现、记录、标注、训练、验证的闭环过程,为技术和数据提供自动化的迭代能力。
而关于海量数据,这是数据驱动的原料和前提。
之前有粗略估计,实现完全无人驾驶,需要100万辆车跑一年,每辆每天跑10小时以上。
如此海量数据,完全依靠自建车队采集,几乎不现实。
量产自动驾驶数据流能够助力完全无人驾驶,源自统一量产传感器方案。
MSD传感器方案包括视觉传感器、激光雷达与毫米波雷达,均覆盖360°范围,该传感器方案子集与量产传感器方案保持一致。

所以理解了无人驾驶终局的两大要素,或许也就不难明白Momenta此次谈及的两条腿战略:
一条腿是量产自动驾驶;
另外一条是完全无人驾驶。
量产自动驾驶,人车共驾,以人为主,但解放人类在高速环路、停车场等场景下的驾驶时间,提升驾驶安全性及驾驶体验。
而且通过量产自动驾驶,实现海量数据获取——学特斯拉又超乎其外。
进一步,量产自动驾驶可以给完全无人驾驶带来数据,通过数据驱动的方式,去自动化地解决99%的问题。
未来随着量产产品上市,像 “活水”一般源源不断注入MSD,推动MSD算法不断升级,使得完全无人驾驶系统不断进化。
这是数据流上的打通。

而通过完全无人驾驶,还能给量产自动驾驶反馈技术流,不断提升体验和能力,让量产自动驾驶持续进步,提升行业份额。
当然,数据流和技术流形成闭环,听起来不算稀奇。
但真正实现这样的战略并不容易,关键是量产传感器方案的一致性、互补性,并在量产自动驾驶战略中真正快速低成本交货、落地。
这也是特斯拉和Waymo难以跨公司二合一的原因。
另外,作为创业公司,在数据流和技术流闭环之外,靠融资烧钱显然不可持续,必然还需要现金流。
所以Momenta创办3年来,先在量产自动驾驶发力,实现数据流和现金流方面的验证,然后发力完全无人驾驶,同时着力于打通两者之间的数据流和技术流。
现在,完全无人驾驶方案发布,数据流和技术流的战略雏形形成,现金流也能让公司不受舆论和资本市场变化而左右。
曹旭东说, 目前Mpilot 和MSD的原型发布,标志着两条腿的雏形期形成。预计到2019年-2024年,量产自动驾驶大规模上市,以及MSD真正的完全数据驱动,完全自动化,则是“两条腿”战略得到验证的时刻,也是战略的成型期。
道阻且长,行则将至
不过,也还没到一脚定江山的时刻。
雏形初现,一切还只不过是开始。
更何况这样的战略完整披露,一方面会面临质疑,另一方面也有被复制的风险。
但曹旭东并不担心。他说:“战略没有优劣,战略是选择。这个战略有其优点,也有难点和挑战。我们在选择战略同时,也必须克服和解决其背后难点。我相信,战略发布后,看到的不是抄袭,更多的是争议。在战略执行时,遇到困难,可以选择继续走下去,也可以去选择其他战略,但我们选择迎难而上。道阻且长,行则将至。”

按照Momenta的说法,执行层面主要面临两个维度的挑战:包括技术难度和商业难度。
技术层面的难,例如数据流的打通。曹旭东认为,行业主流都是以激光雷达为主的技术解决方案,但Momenta是以统一量产传感器为主,需要打通量产自动驾驶到完全无人驾驶的数据流,而他们在其中做了大量的技术创新。
在硅谷拜访时,曹旭东也讲到Momenta的战略和已解决的技术难题,得到很多行业专家的认可和欣赏,因为Momenta在做原始的技术创新,而不是简单的复制跟随。
商业层面的难,包括如何深入行业、理解客户,如何拓展能力边界及更好的服务市场。
曹旭东进一步解释:“To B是系统性的业务,面对的是一个组织,需要得到方方面面的认可。一线客户都有很强的技术能力和很高的技术标准,需要经过非常严格的技术评测。而我们经过层层验证,最后获得了客户的认可,进入了量产体系。”
Momenta也有相对长远的完整时间表。
他们内部,认定2016年-2019年是战略雏形期,2019年-2024年是战略成型期。
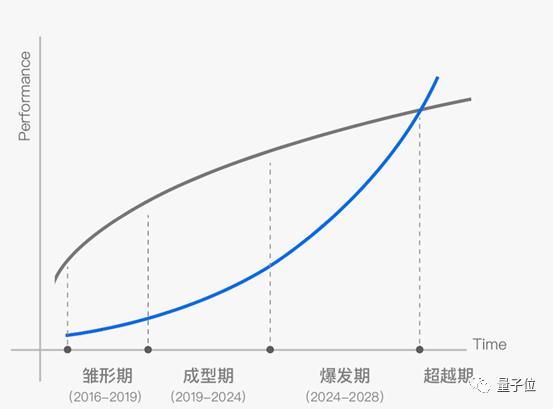
然后2024年-2028年才是真正的战略爆发期,那时候在完全自动驾驶“这条腿”上将加速赶上Waymo。
只是现在开始,自动驾驶“面壁者”Momenta,战略意图一览无余。

告别盲人摸象
作用力也才刚刚开始。
从Momenta自身来说,彻底告别被“盲人摸象”状态。
高精度地图供应商?高级辅助驾驶玩家?量产自动驾驶交货……
都不准确。
大道至简,Momenta(现在)是一家怎样的公司?
Momenta = Tesla + Waymo。
而且这种结合带来的新场景新技能,还可能不是线性相加。
或许也是聚变反应。
比如特斯拉一直是从车角度提供方案,Waymo则是运力技术维度……
但二者结合,就是完整软硬件集合体,载人载货,私家车共享车,都有了可能。
简而言之,能做的更多,可以做的更多,新价值已经展现,新边界也就要重勘。
自然还会进一步带动行业新格局重塑。
自动驾驶发展中,特斯拉方案和Waymo路线,一次次被提起,一次次被模仿,一次次被对标。
这样的新玩家新势力,无论中美,都可以举出很多。
但今日之Momenta,在理论上真正达到二合一,并且验证了可行性。
于是,之前衡量自动驾驶的时间表,曾经理解Momenta的框架,可能是时候刷新了。
One more thing
虽然Momenta是中国自动驾驶的独角兽,但作为Momenta的船长,曹旭东最关心的并不是公司的估值。
他认为商业世界一切有为法,一定离不开价值规律本身,估值并不需要过分关心。
他关心什么?
作为CEO,他说核心还是人,组织的学习、进步和提升。

这位Momenta创始人,今年来自上而下改变了一件小事:不再把“创始人”放在对内对外的任何地方,仅以职务——CEO示人。
他解释说,Momenta正在最大限度通过组织变革、文化塑造,形成合伙人文化。
合伙人不分加入先后,不论年龄资历,核心关注的是技术、贡献和志同道合。
他希望以此吸引最顶级的牛人,让更多有识之士加速自动驾驶终局到来。
《道德经》里说,夫唯不争,故天下莫能与之争。
但真正能迈步实践者,少之又少。
如今,无人车独角兽Momenta,宣示两条腿,放下“自我”,立志要做推动终局实现的那个玩家。
这就是Momenta。
路测完整视频:
— 完 —
2019年度奖项发布!锁定AI Top玩家
50家领航企业、10大商业突破人物、10大最具创新力产品3大奖项出炉。

跟大咖交流 | 进入AI社群

量子位 QbitAI · 头条号签约作者
վ'ᴗ' ի 追踪AI技术和产品新动态
喜欢就点「在看」吧 !





