四两拨千斤:130公斤四足机器人拖动3吨重飞机
选自IEEE Spectrum
作者:Evan Ackerman
机器之心编译
参与:shooting、杜伟
大约从 2010 年开始,意大利技术研究所(IIT)的 Dynamic Legged Systems Lab(DLS)就一直致力于研究液压驱动四足机器人,并在 2011 年的 IROS 大会上首次展示了他们的 HyQ 研究平台,自此他们一直利用该平台进行一些重大的研究。
HyQ 是一款液压四足机器人,是 DLS 的旗舰平台。自 2010 年展示以来,HyQ 展示出了各种各样的动作,比如爬楼梯、爬烟囱、在崎岖的地形上全方位小跑、用踏步反射小跑、跳跃等。
DLS 实验室拥有最先进的设备来开发、制造和测试液压机器人。实验室目前已有的机器人包括 HyQ、HyQ2Max、MiniHyQ 和 HyQReal。本文介绍的就是最新机器人 HyQReal。
在机器人领域,9 年是一段太长的时间,所以相较于 SpotMini、ANYmal 以及 Cheetah 3 等最近出现的四足机器人(灵活性更强),HyQ 似乎显得有些古老。
昨日,IIT 推出了一款全面升级的四足机器人,名为 HyQReal。这款四足机器人体积很大、拉力十足、结实耐用并且性能强劲,IIT 想要测试一下 HyQReal 是否可以拉动一架 3 吨重的飞机。

结果显示,这款机器人成功地拉动了一架小型客机:

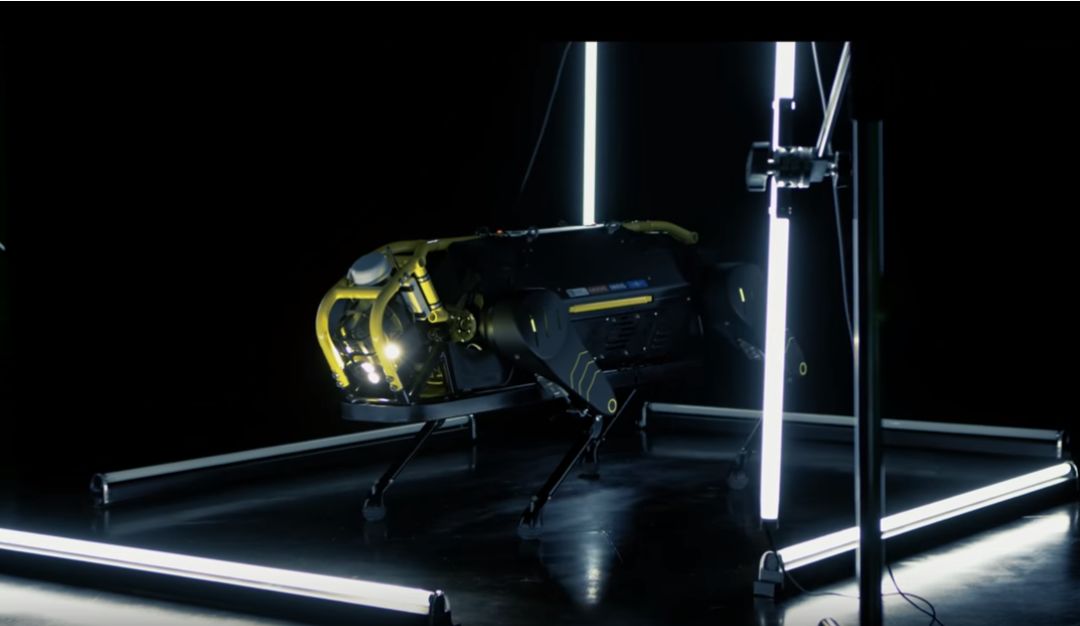
HyQReal 长 1.33m,高 0.9m,加上内部液压系统和电池,它的重量为 130kg。这款机器人由一个铝制防滚架以及凯夫拉尔、玻璃纤维和塑料组成的外壳保护。机器人还有定制的橡胶垫脚,当前行困难时可提供牵引力。机器人载有两台计算机,一台指引视觉方向,一台用于控制。
昨日,Dynamic Legged Systems Lab 负责人 Claudio Semini 在 ICRA 大会举办了一场研讨会,详细介绍了 HyQReal 的整体性能。如下图所示:
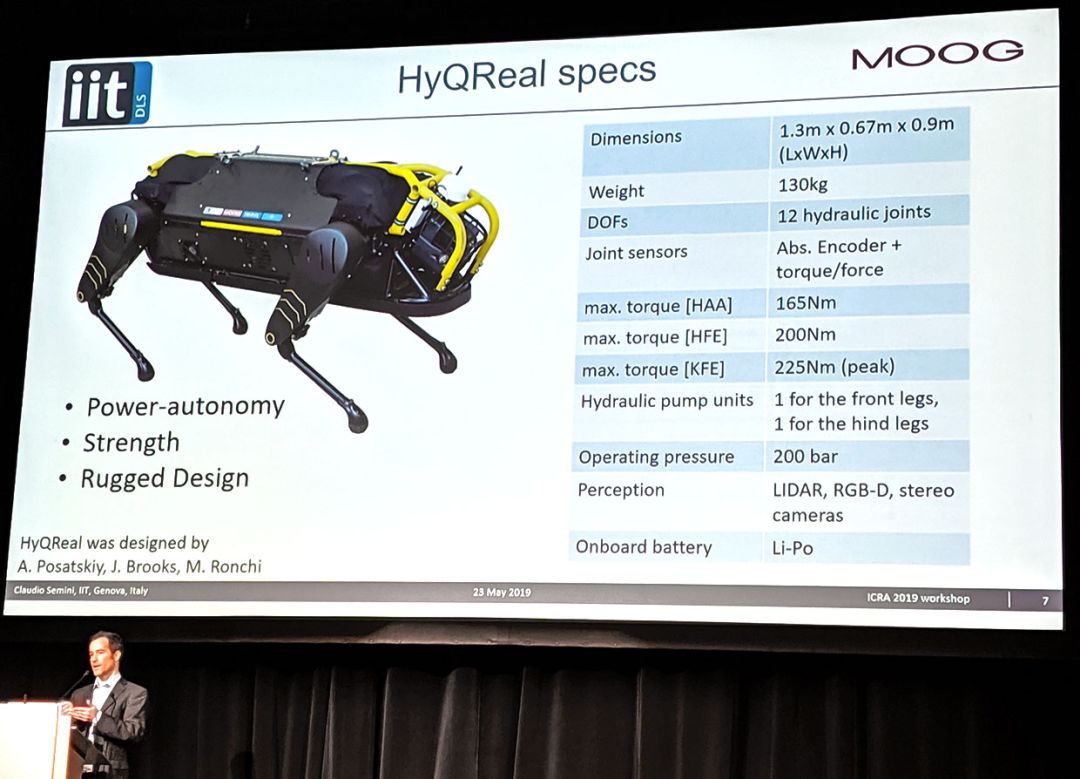
在液压系统方面,IIT 和 Moog 合作,使用他们的集成智能致动器,每个致动器都有 3D 打印的钛装置。该装置包含所有传感器、电子器件和流体路径。HyQReal 有两个独立的液压泵,一个驱动前腿,一个驱动后腿。电池(重 15kg)大概可以用两个小时,虽然 IIT 还没有做过续航测试。由于致动器大部分是密封的,所以 HyQReal 是防水防尘的,可以在喷水或洒满沙子的情况下保持移动。
ICRA 上展示了机器人小跑、躺下和再次站起来的简短视频。据说它能够在坠落后自动恢复,但 IIT 还没有测试过这一点。HyQReal 是一款非常非常新的机器人,所以有很多东西研究人员还没来得及搞清楚,也没有机会给它安装结实的电动手臂,而这是对这款机器人的长期规划之一。
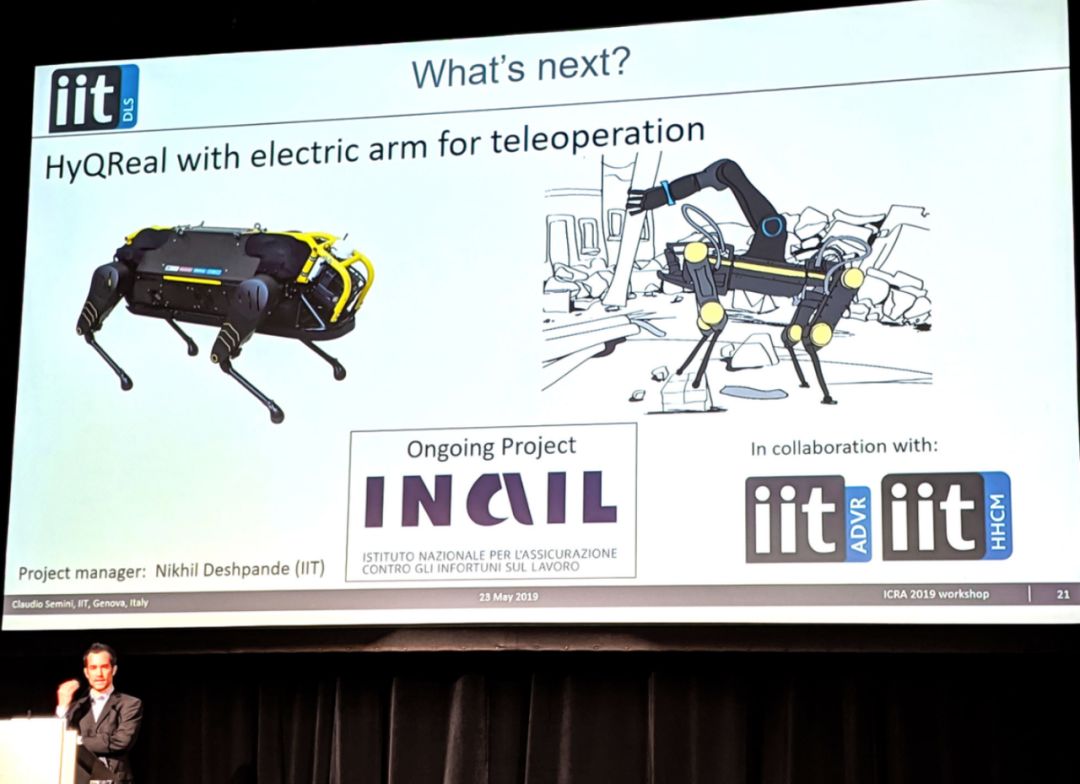
其实,拉飞机并不是 HyQReal 的主要工作。更广泛一点来说,它是为了「在紧急情况下支援人类」而开发的,应该是「灾难响应、农业、设施停运和检查」的理想选择。但目前它仍是一款研究型机器人,尽管这份研究是基于 IIT 对之前的 HyQ 所做的工作。IIT 希望接下来能够加快研究,以实现其工业化。

原文链接:https://spectrum.ieee.org/automaton/robotics/industrial-robots/watch-iits-new-hyqreal-quadruped-robot-pull-an-airplane
本文为机器之心编译,转载请联系本公众号获得授权。
✄------------------------------------------------
加入机器之心(全职记者 / 实习生):hr@jiqizhixin.com
投稿或寻求报道:content@jiqizhixin.com
广告 & 商务合作:bd@jiqizhixin.com




