【通讯专题】浙江大学刘勇:正则化深度学习及其在机器人环境感知中的应用

今天为大家分享的是浙江大学刘勇教授在第五期智能自动化学科前沿讲习班中所作报告——“正则化深度学习及其在机器人环境感知中的应用”。
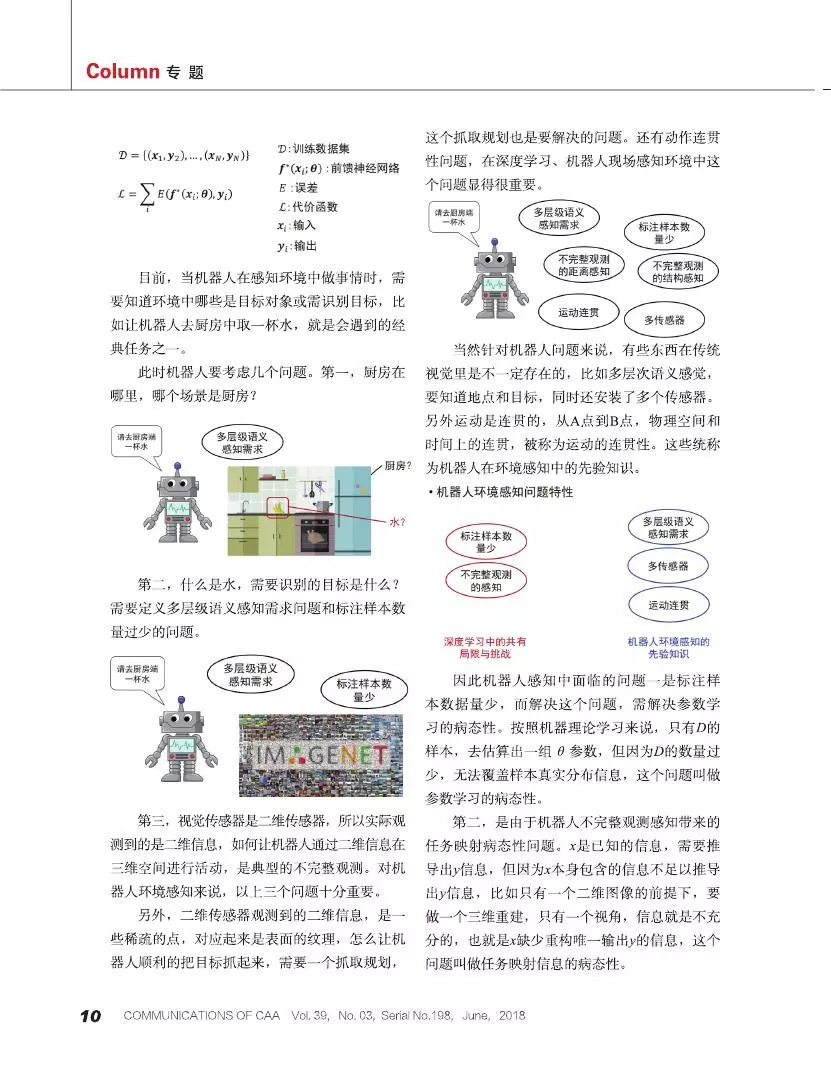
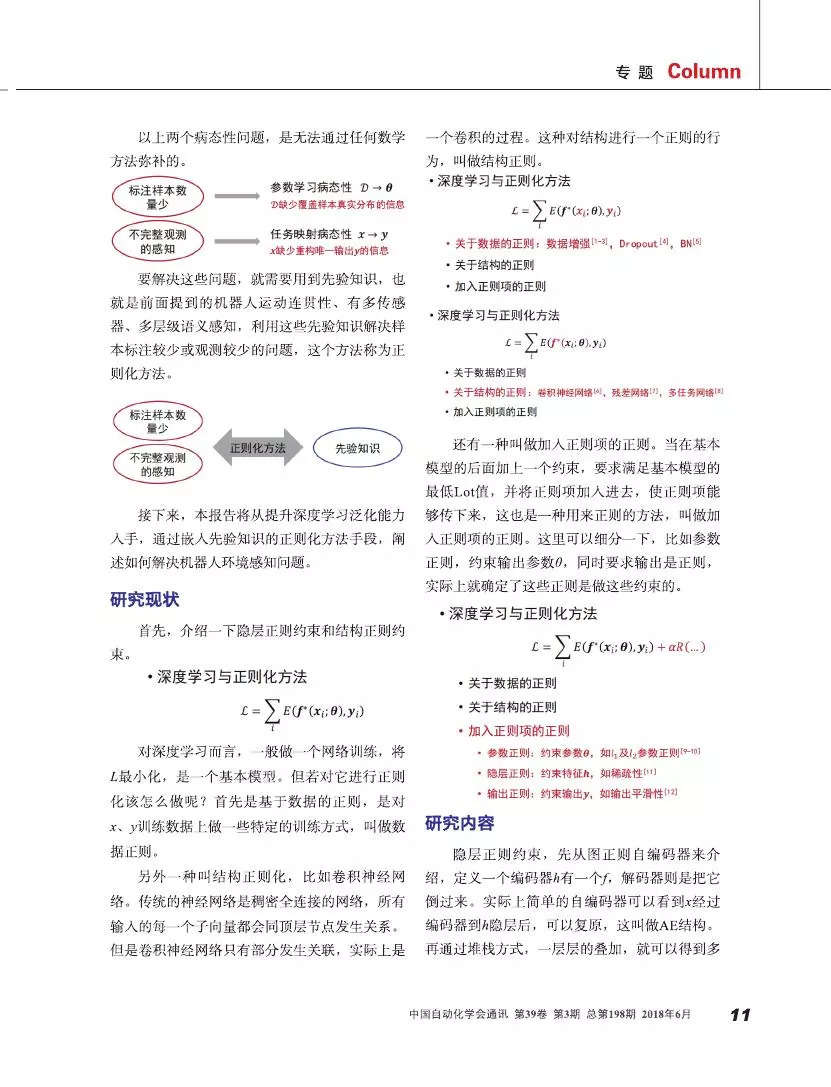
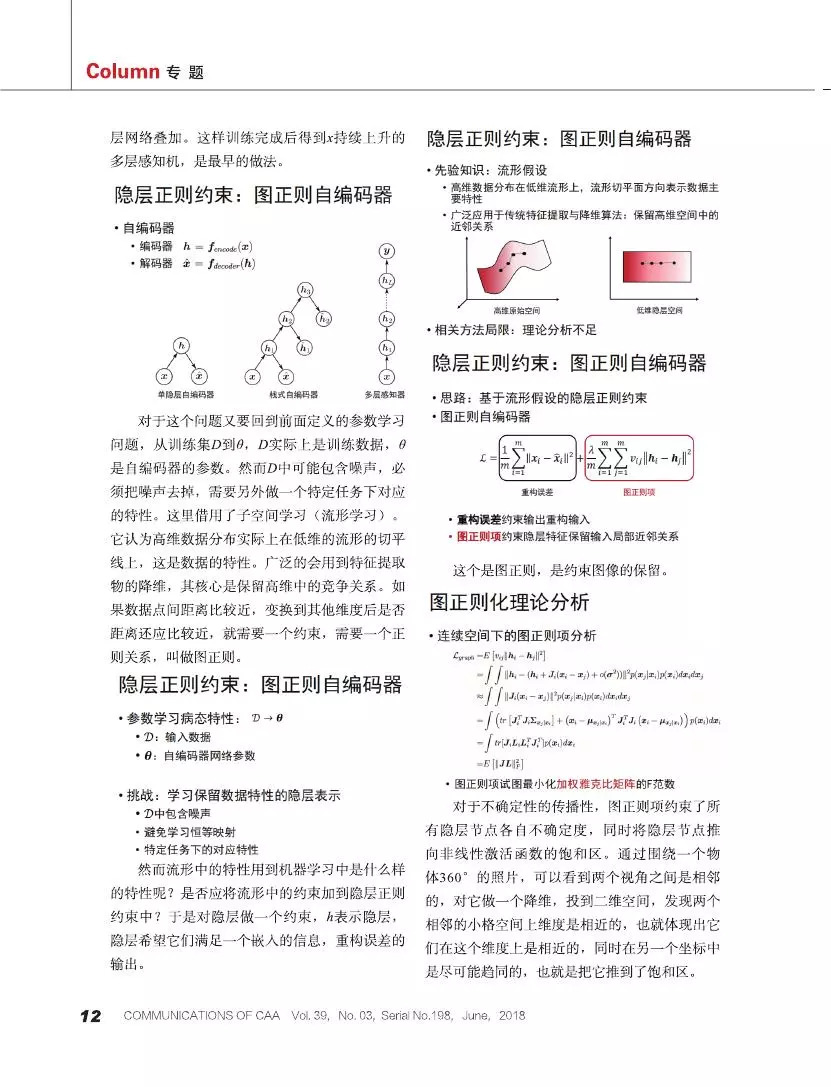
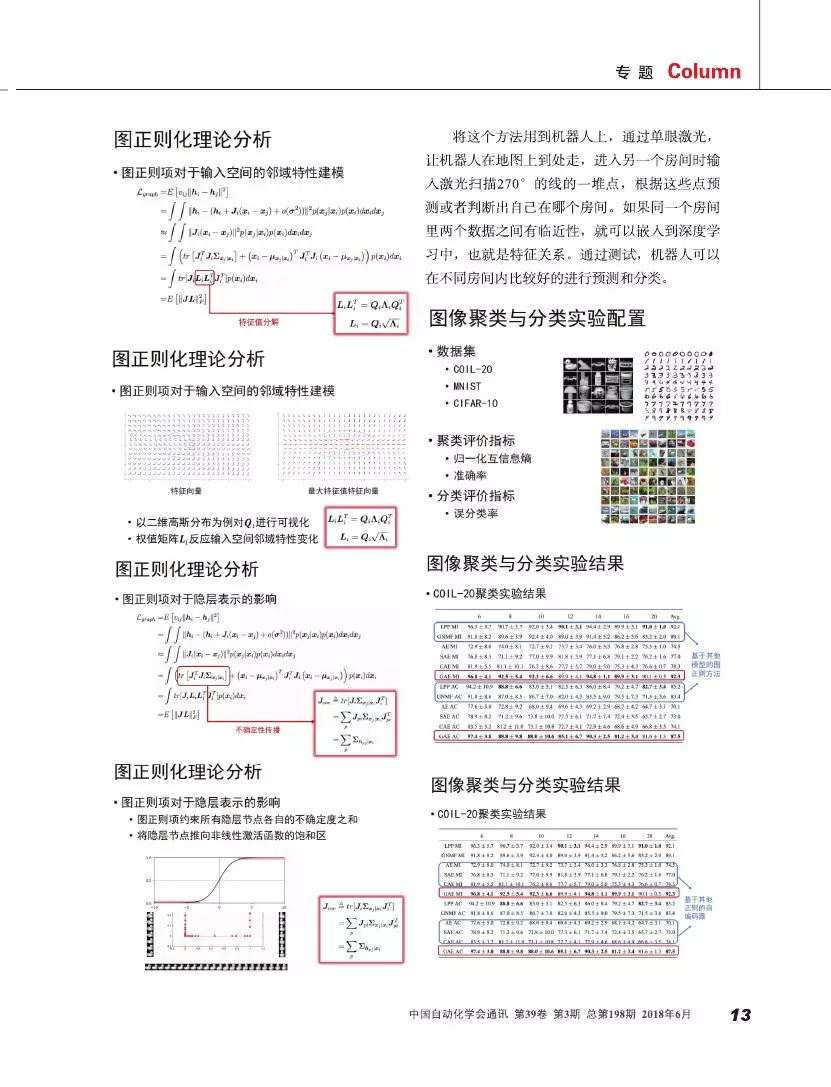
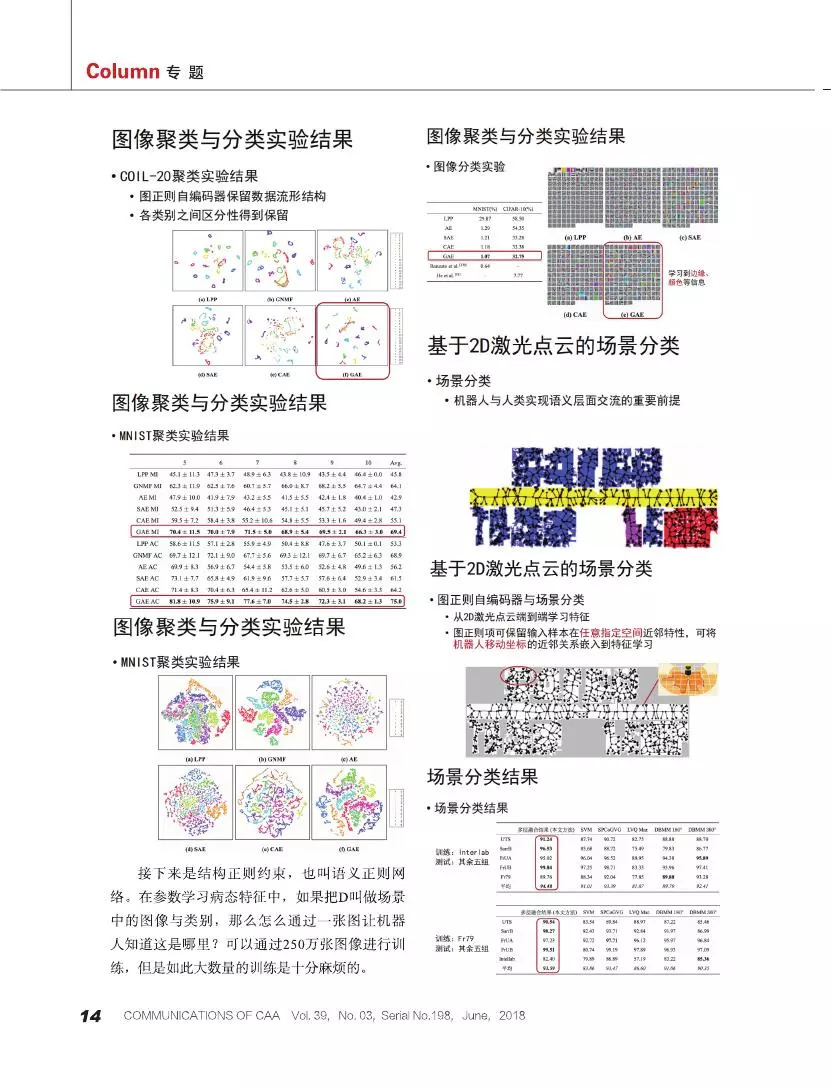
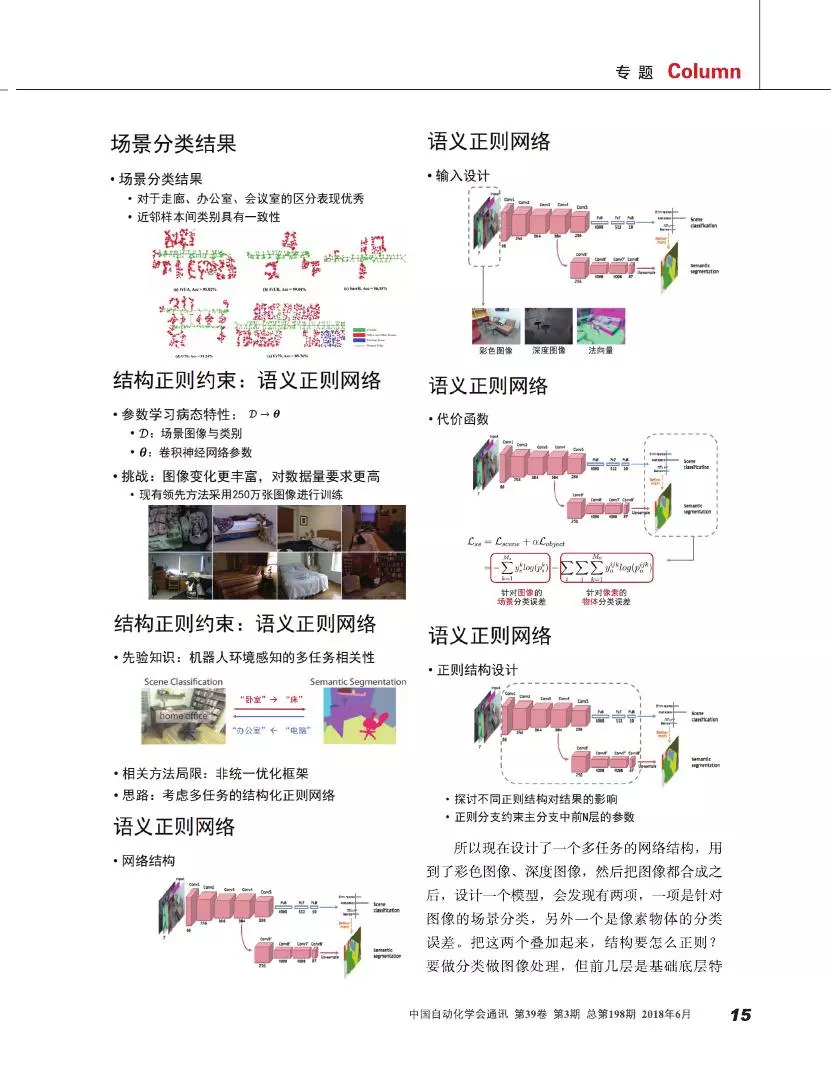
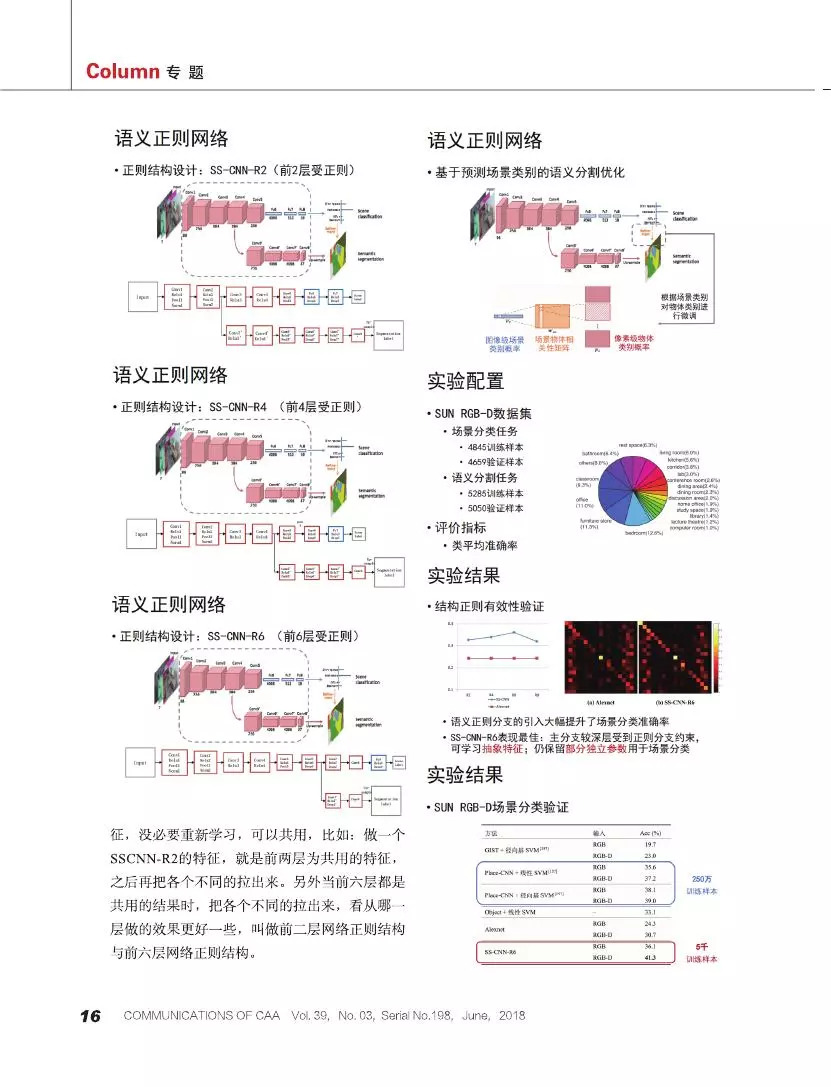
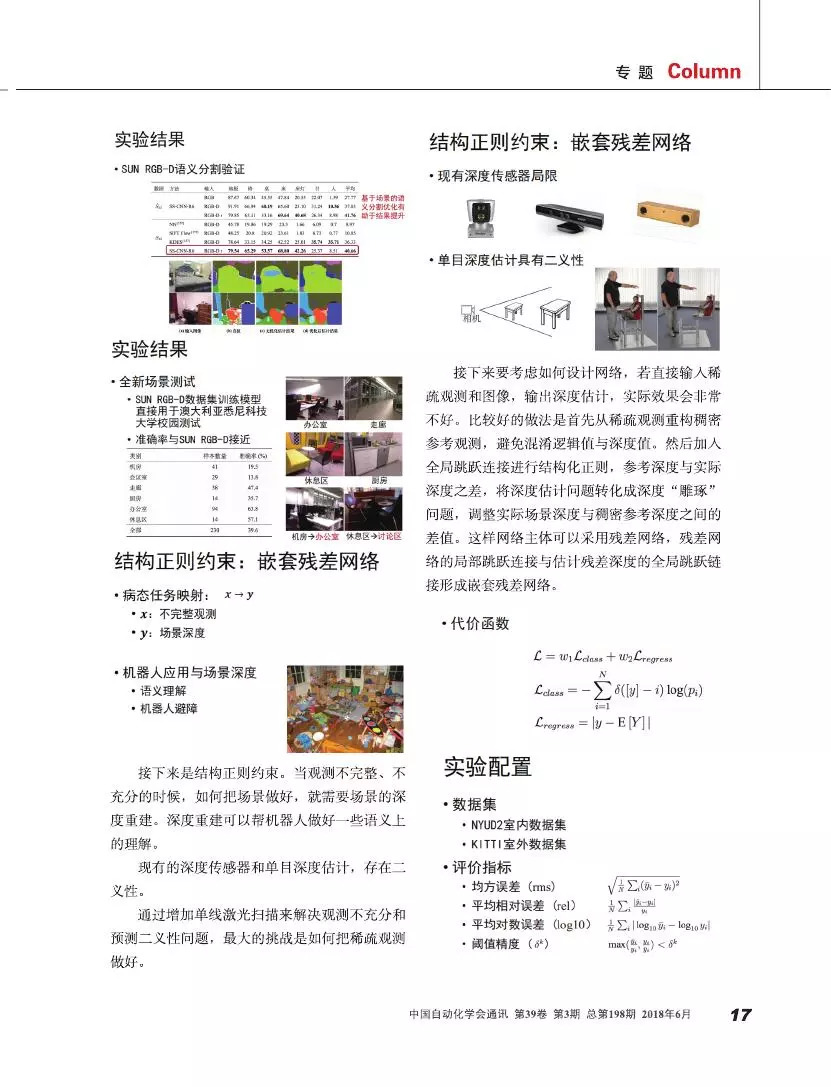
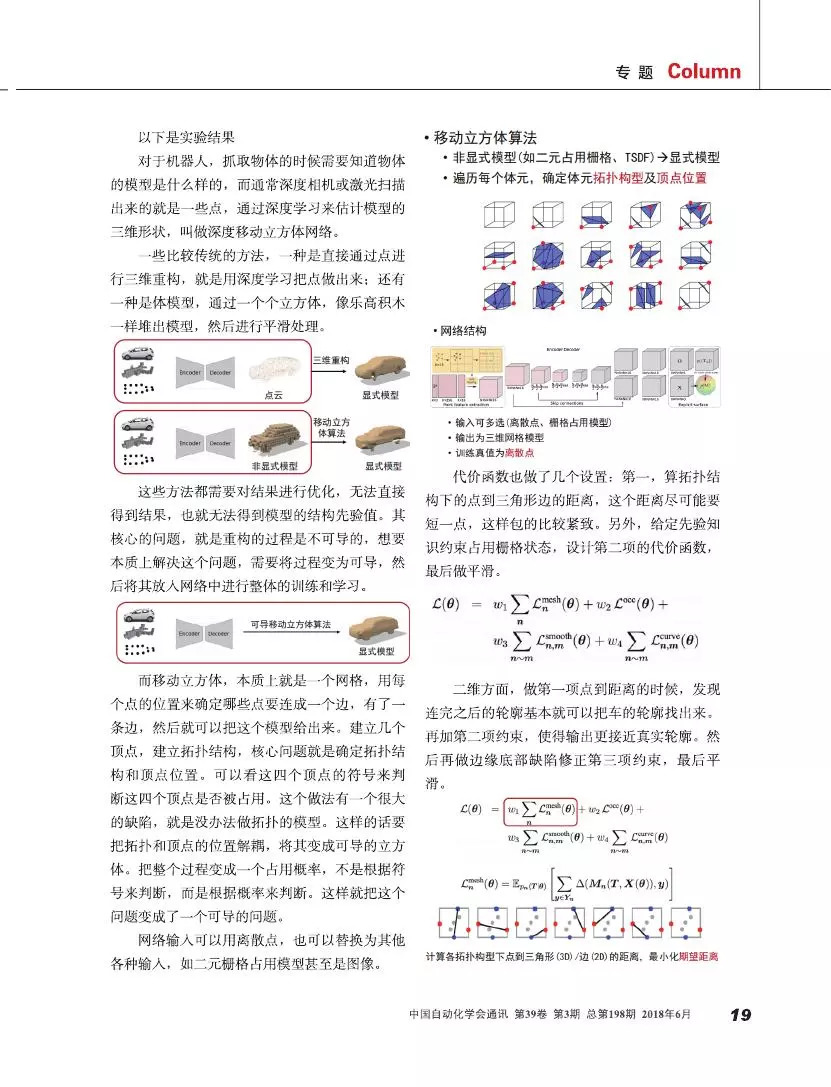
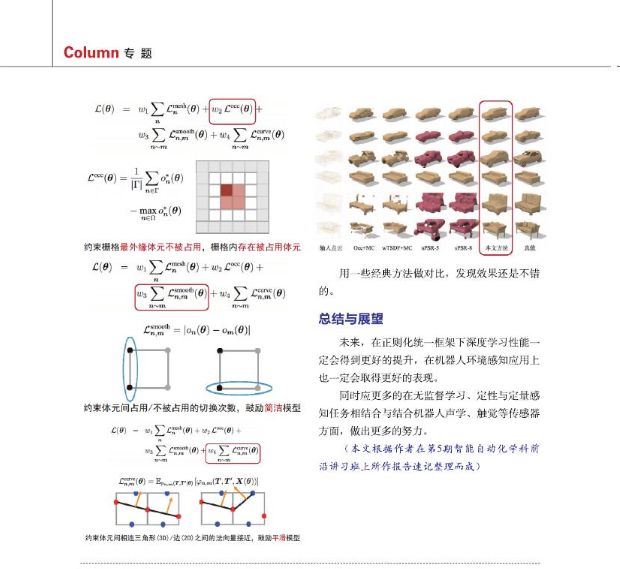
刘勇教授在报告中指出,随着人工智能技术的飞速发展,深度神经网络技术在图像分析、语音识别、自然语言理解等难点问题中都取得了十分显著的应用成果。然而该技术在机器人感知领域的应用相对而言仍然不够成熟,主要源于深度学习往往需要大量的训练样本来避免过拟合、提升泛化能力,从而降低其在测试样本上的泛化误差,而机器人环境感知中涉及的任务与环境具有多样化特性,且严重依赖于机器人硬件平台,因而难以针对机器人各感知任务提供大量标注样本;其次,对于解不唯一的病态问题,即使提供大量的训练数据,深度学习方法也难以在测试数据上提供理想的估计,而机器人感知任务中所涉及的距离估计、模型重构等问题就是典型的病态问题,其输入中没有包含对应到唯一输出的足够信息。针对上述问题,刘勇教授的报告以提升深度学习泛化能力为目标、以嵌入先验知识的正则化方法为手段、以机器人环境感知为应用背景进行了详细介绍。

点击阅读原文,查看更多精彩内容

本文刊登于中国自动化学会通讯2018年第3期
往期文章推荐

🔗【CCHI2018】 2天8位院士4个专题论坛14个大会报告43个专题特邀报告 ——群贤毕至 共探认知科学与人工智能相关领域发展
🔗【学会新闻】2018新一代人工智能高峰论坛——大咖齐聚福建漳州,共话人工智能的最新动态和发展趋势
🔗【通知】2018全国第二十三届 自动化应用技术学术交流会会议通知
🔗【通知】关于举办科普中国•2018互联网科普产品征集活动的通知
🔗【CAC2018】中国自动化大会截稿时间变更至8月30日的通知


点击“阅读原文”查看通讯更多内容
登录查看更多
