超越MobileNetV3!Facebook等提出更轻更快的FBNetV2 | CVPR 2020
点击上方“CVer”,选择加"星标"或“置顶”
重磅干货,第一时间送达

本文作者:dwilimeth
https://zhuanlan.zhihu.com/p/132533771
本文已由原作者授权,不得擅自二次转载
论文:https://arxiv.org/abs/2004.05565
代码(即将开源):
https://github.com/facebookresearch/mobile-vision
今天介绍一篇 Facebook 工作 FBNet 的升级版本 FBNetV2: Differentiable Neural Architecture Search for Spatial and Channel Dimensions。
本文的搜索空间相比于 FBNet 提升了将近 
Motivation
首先回顾一下基于 DARTS 的这种可微分的网络结构搜索方法 (Differentiable Neural Architecture Search) :一般是构造一个包含所有候选结构的超图 (super graph),然后从中选一条 single path 做为最终的网络结构。
作者指出,基于 DARTS 的方法有两个缺点:
搜索空间相对较小。由于要把很大的 super graph 以及 featuremap 存在 GPU 上,显存的限制就使得 DARTS 系列方法的搜索空间,比基于 RL,进化算法方法的搜索空间要小;
搜索代价会随着每层的选择的增加线性增长。每在 supergraph 中增加一个新的搜索维度,显存和计算量都会大幅增长,这也就制约了搜索空间不能太大。
作者的改进方向就是在几乎不引入显存和计算量代价的情况下,相比于 FBNet,搜索空间加入了 channels 和 input resolution 两个维度,从而把搜索空间提升了将近
对 supergraph 中的 channel / input resolution 选项加入 mask
复用 supergraph 中所有选项的 featuremap
下面进行详细的介绍。
Channel Search
把不同的 channel 加入搜索空间,之前的 DNAS 系列方法就是把不同的选项融进 supergraph,这样会带来接近 
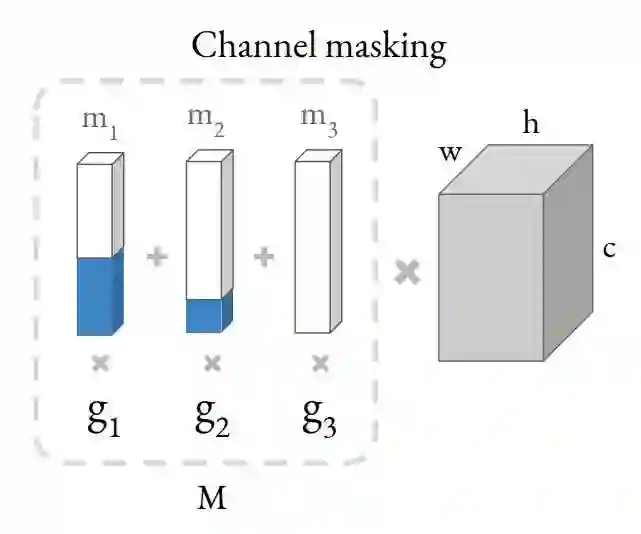
具体的做法如上图所示。右边那个灰色的长方体表示一个 shape 为 (c, h, w) 的 tensor,和左边的 mask 向量 M 相乘的结果。M 可以拆解为多个 mask 

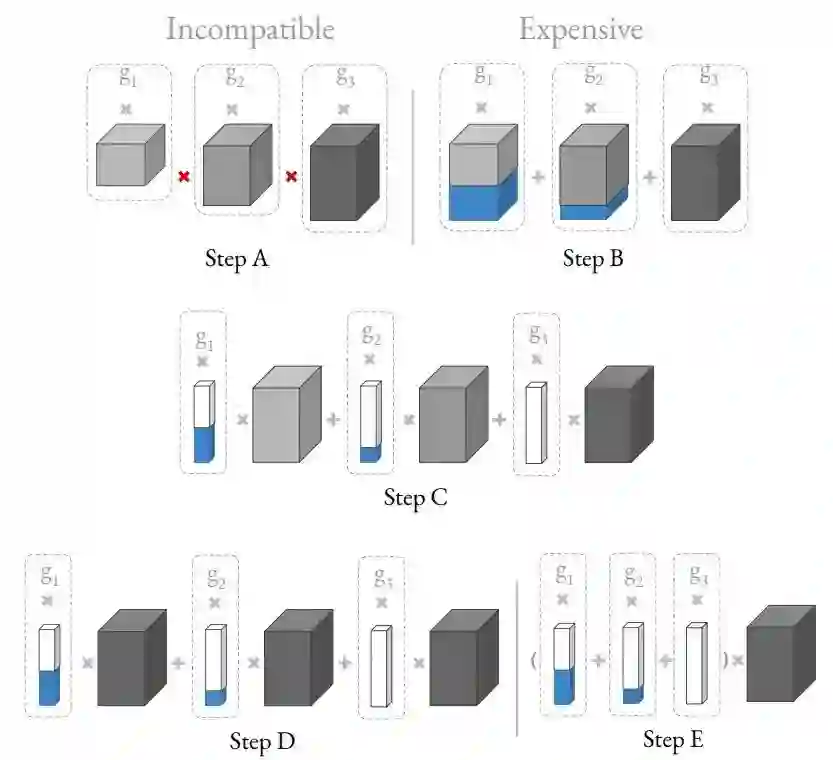
想要进行加权和,首先就会遇到上图 Step A 中的问题:channel 不同,对应的 tensor shape 不用,无法直接相加。为了解决这个问题,可以引入 Step B 中的方法:对输出做 zero padding,使之shape 对齐(也就是图中蓝色部分),然后就可以加权和了。Step B 和 Step C 是等价的。Step C 相当于对卷积的 filter 进行 mask。随后作者又进行了一个简化的假设,假设所有的 weighting 共享,也就是 Step D 的形式。Step E 和 Step D 是等效的,即为最终的 channel masking 机制。
Input Resolution Search
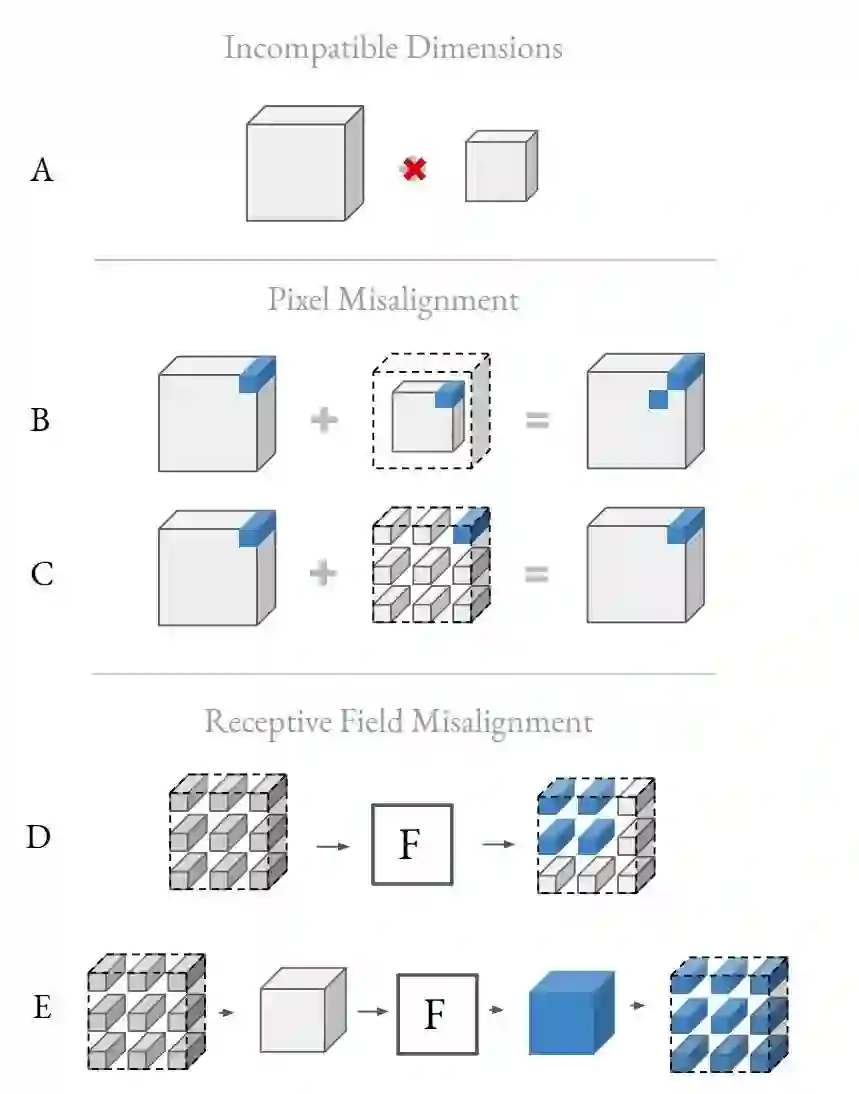
上面说了在 channel 维度的做法。在 Spatial 维度的做法也是类似的,作者也想构造一种加权和的形式表征不同分辨率的 feature。如上图 A 所示,不同分辨率的 tensor 不能直接相加。图 B 说明了在边缘 padding 的方式不行,pixel 无法对齐。图 C 说明了为了让 pixel 对齐,要采用这种 Interspersing zero-padding 的形式。但是图 C 这种方式会又带来感受野 mis-alignment 的问题:如图 D 所示,Interspersing zero-padding 之后,一个 3x3 的 kenel 有效感受野变成了 2x2。所以图 E 才是作者最终的解决方法:和 F 运算完之后再 padding。
Search Space
通过上述的Channel masking 和 Resolution subsampling 机制,FBNet V2 的搜索空间就可以在 channel 和 spatial 维度扩展了。FBNet V2有三个不同的系列:FBNetV2-F, FBNetV2-P, FBNetV2-L。分别对应的优化目标为Flops,参数量和大模型。下表是大模型 FBNetV2-P 的搜索空间:
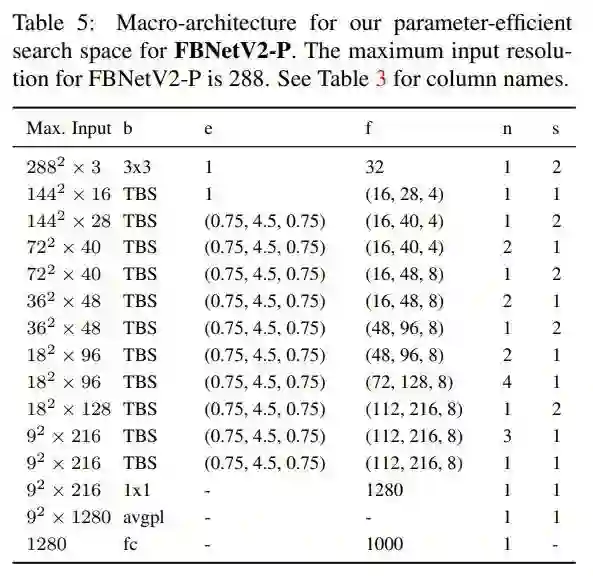
输入为288x288x3。channel 维度的搜索体现在表格种的 number of filters f,比如说可能是 16 到 28 之间步长为 4 的一个值。spatial 维度的搜索体现在表格中的block expansion rate e,从 0.75 到 4.5,步长为 0.75。
TBS 就是指待搜的 block。这些 TBS 对应的 block 具体的搜索空间如下表:
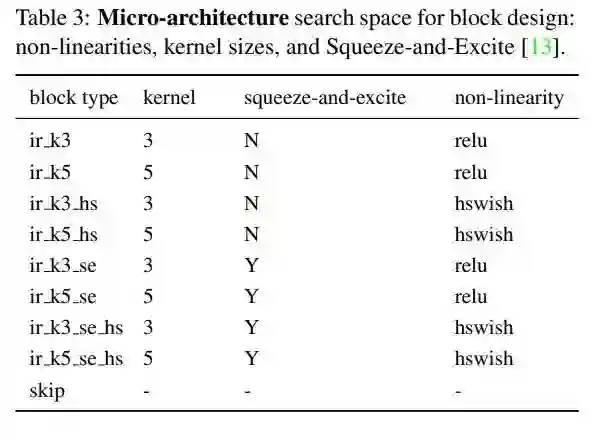
可以看出,组成的 block type 就是由 3x3 或者 5x5 的 depth-wise conv + SE + relu / hswith 组成。
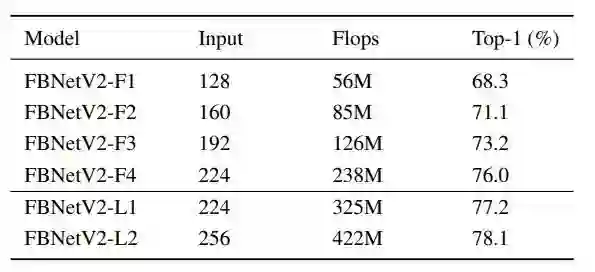
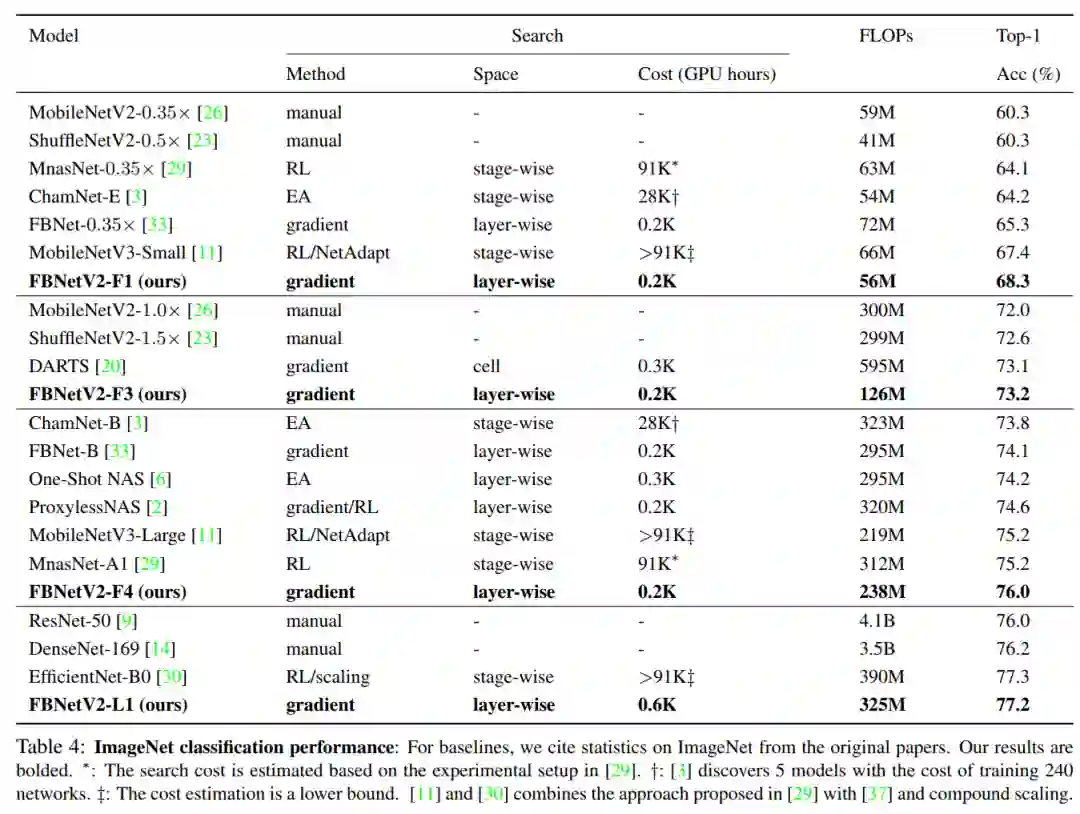
这三个系列最后搜出来的结果,在 ImageNet 上的结果如下表:
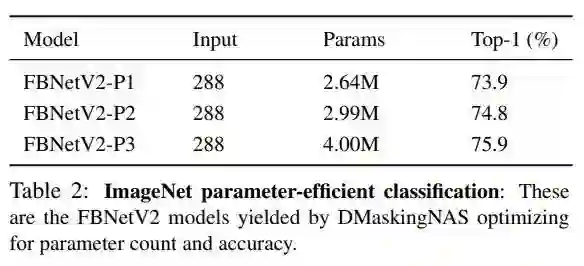
同样是以 FBNetV2-P 为例子,和其他方法的对比如下图:
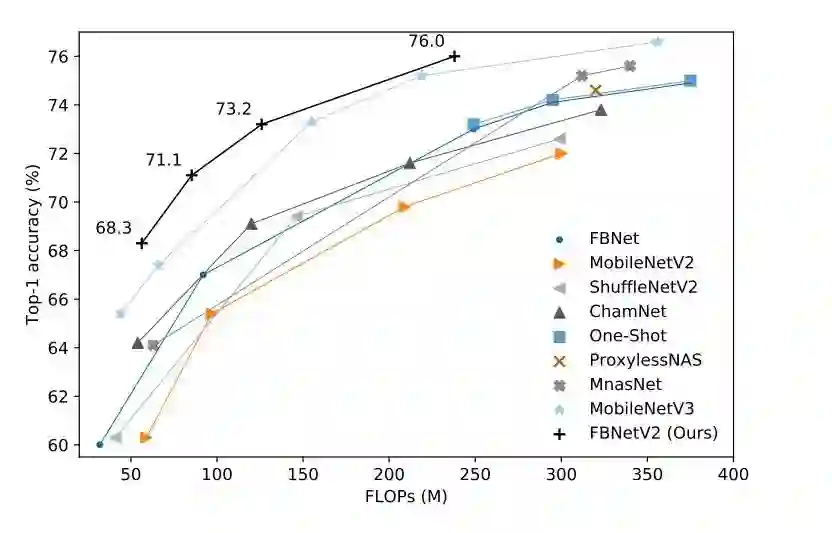
总结一下,本文的贡献点主要在于提出了一种 channel 维度的 mask 机制 和 spatial 维度的 subsampling 机制,能扩大 DNAS 系列方法的搜索空间,同时几乎不增加显存和计算开销。
论文下载
在CVer公众号后台回复:FBNetV2,即可下载本论文
重磅!CVer-论文写作与投稿 交流群已成立
扫码添加CVer助手,可申请加入CVer-论文写作与投稿 微信交流群,目前已满1250+人,旨在交流顶会(CVPR/ICCV/ECCV/ICML/ICLR/AAAI等)、顶刊(IJCV/TPAMI/TIP等)、SCI、EI等写作与投稿事宜。
同时也可申请加入CVer大群和细分方向技术群,细分方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch和TensorFlow等群。
一定要备注:研究方向+地点+学校/公司+昵称(如论文写作+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群

▲长按加微信群

▲长按关注CVer公众号
麻烦给我一个在看!


