自动驾驶推理任务调度

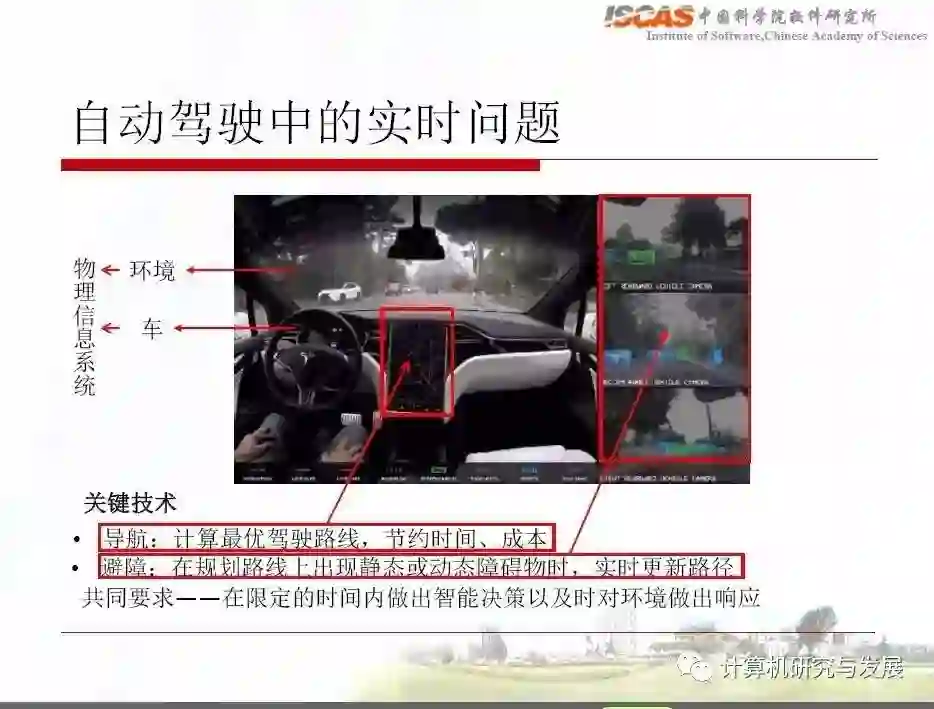
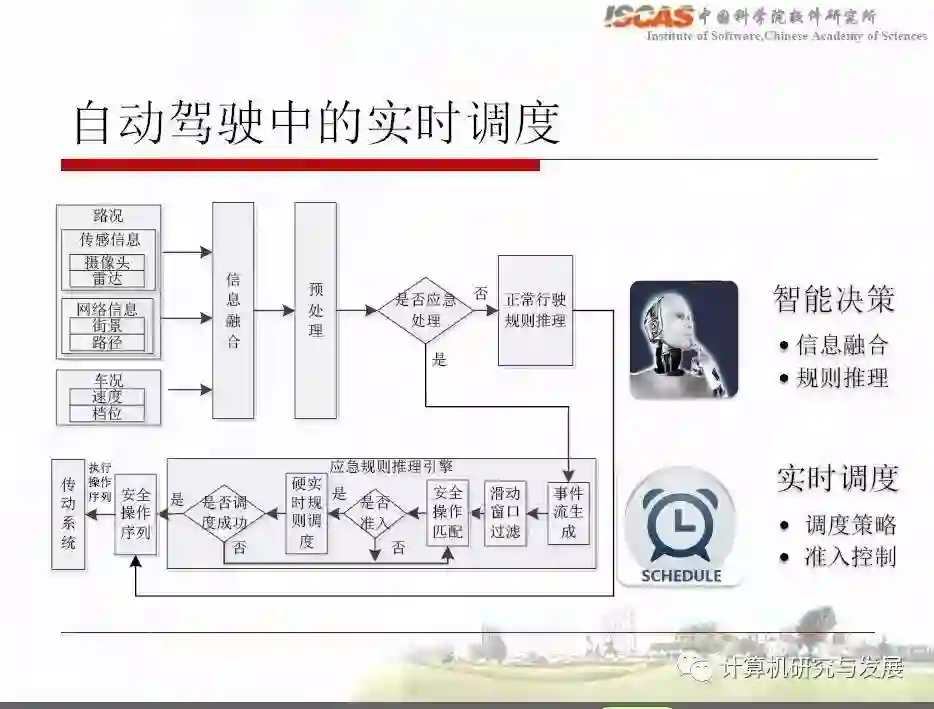
随着车载传感器设备数量的增多,交通设施和城市地标的快速变化、人车混行的复杂路况,对自动驾驶车辆实时反应的能力要求不断地提高.如何通过带有安全性保证的调度策略来应对物理环境中源源不断产生的传感器实时源事件输入,如何及时地控制传动系统来处理源事件并进行推理操作及其响应以规避危险是值得研究的问题.
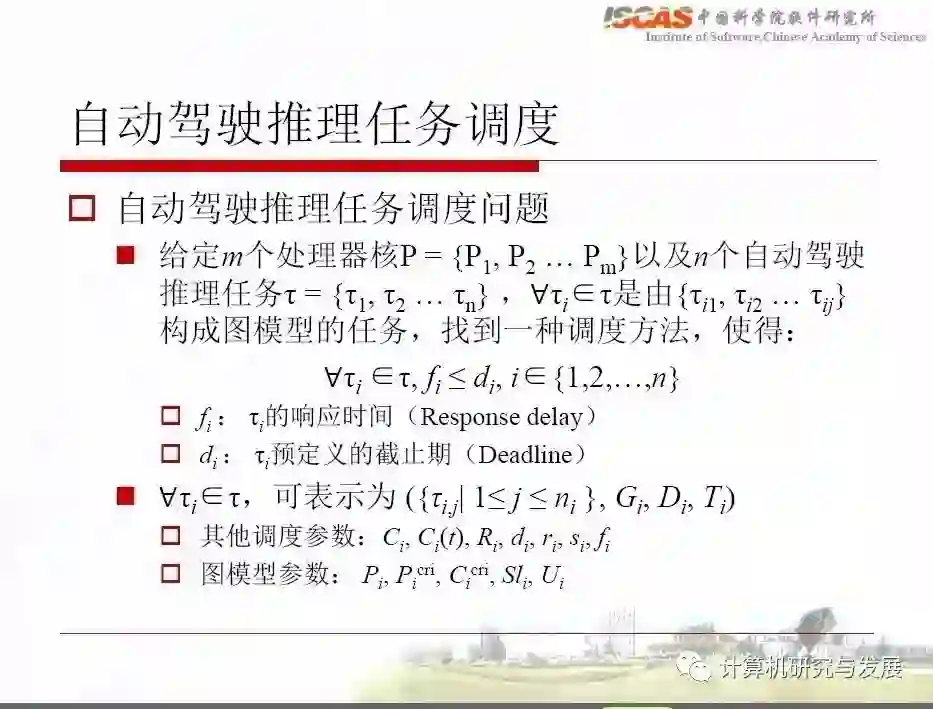
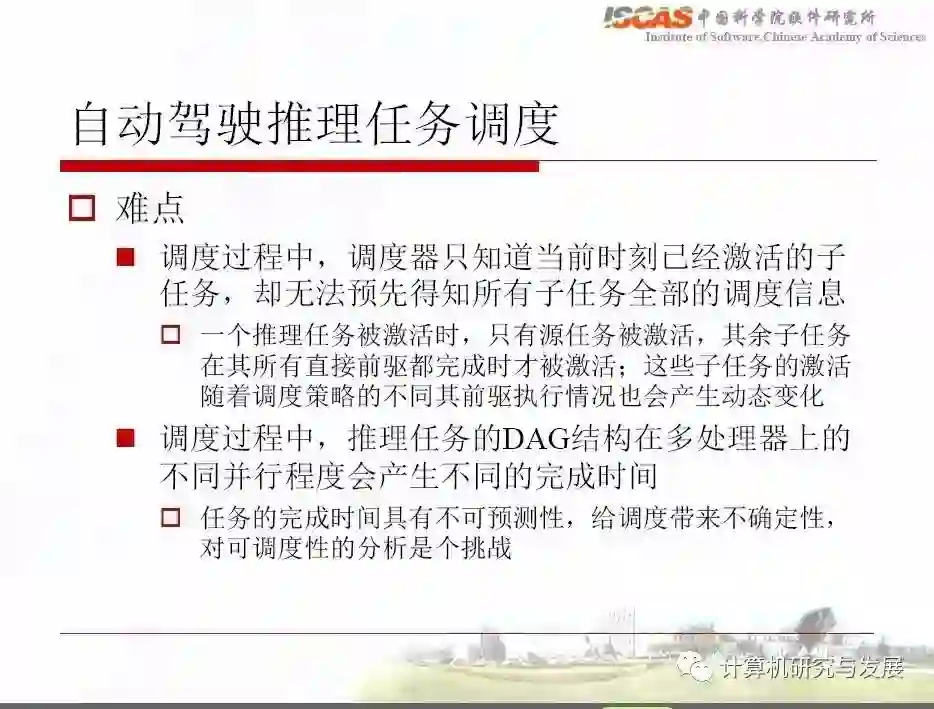
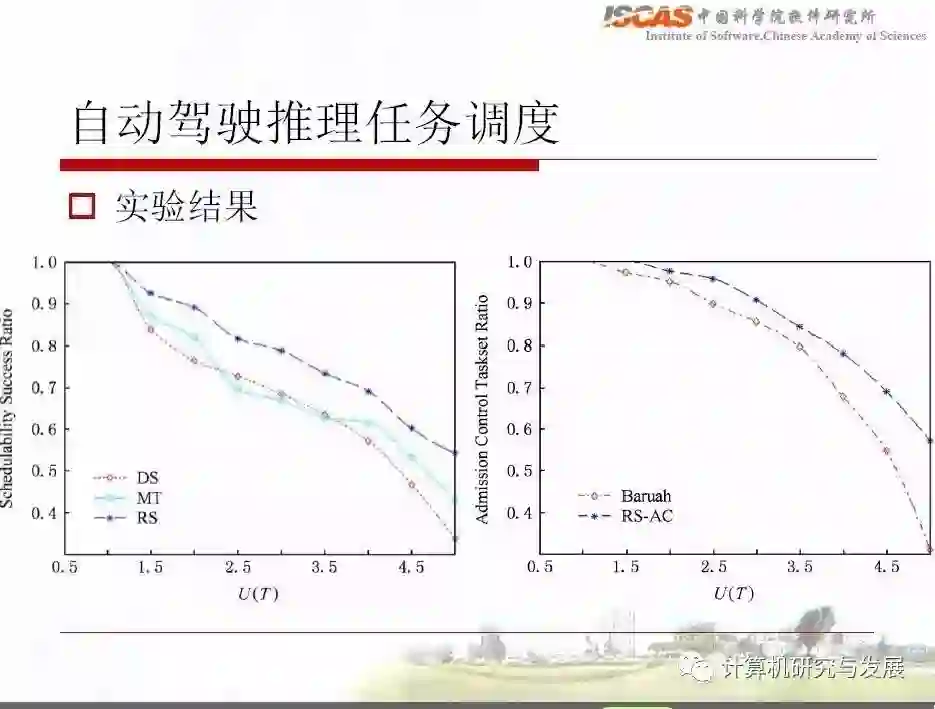
为此,将自动驾驶汽车视为安全攸关系统,提出了一种硬实时推理任务调度方法,首先为自动驾驶的推理过程建立了基于可并行有向无环图的推理任务模型;其次,提出了自动驾驶推理任务调度算法及其准入算法,保证了所调度的推理任务都能在满足硬实时约束的情况下完成自动驾驶推理操作及其响应动作.最后,进行了模拟实验,实验结果验证了该调度及其准入控制算法的有效性.实验结果表明:推理任务调度算法比直接调度算法和模型转换算法在调度成功率上分别高出9.62%和7.31%,该推理任务准入控制算法比Baruah的准入控制算法在任务集准入率上平均高出7.15%.
点击“阅读全文” 可下载。
登录查看更多
相关内容

Arxiv
3+阅读 · 2018年12月13日


相关VIP内容
相关资讯
相关论文
Arxiv
3+阅读 · 2018年12月13日