全方位搜集汪星人行为数据,让AI学做一只狗 | 华盛顿大学最新研究
编译:王一丁、万如苑、云舟
波士顿动力的网红机器狗不仅能稳步行走,还能送快递,但是科学家们对狗和AI的畅想远不止于此。
他们想知道,AI从一只汪星人的身上可以学到什么?
华盛顿大学与艾伦人工智能研究所的答案是,记录一只汪星人在各种环境中行走、取物,在狗公园玩耍、吃东西的数据,将狗的动作和到所看到的东西同步,然后形成一个“汪星人”行为数据集,并用它来培训新的AI模拟器。
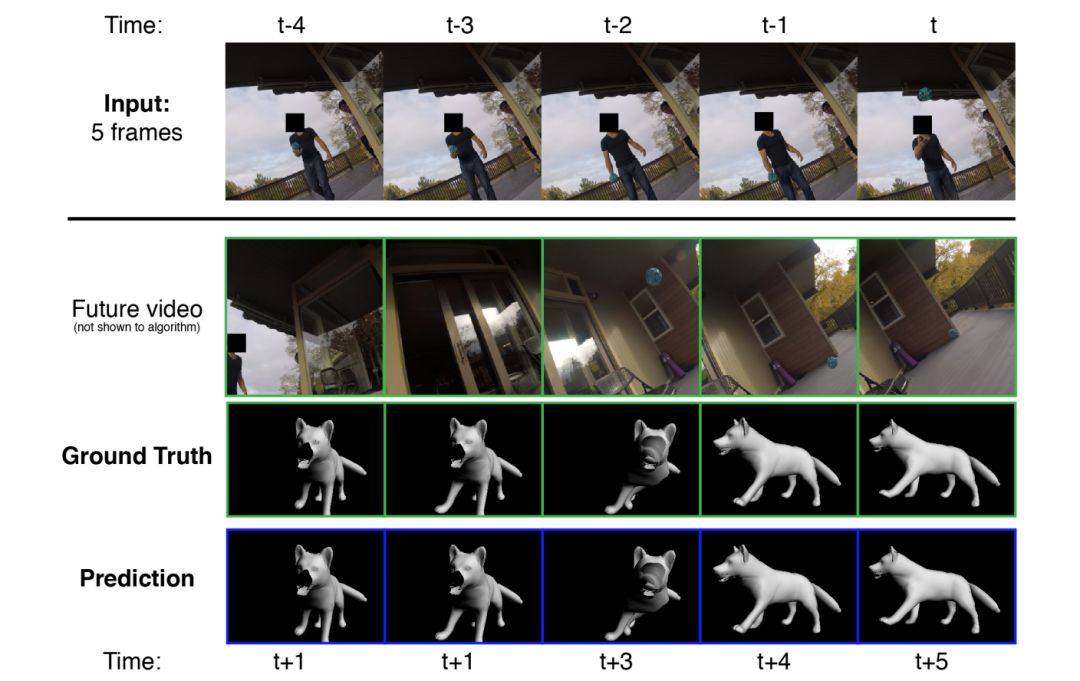
这个“汪星人”AI在给出某种感官上的输入后,比如说说一个房间或街道的景象,或者一个飞过它的球——会预测一只狗在这种情况下会做什么。
简单来说就是,学习成为一只优秀的汪星人。
训练机器学习系统来识别物体、从而进行街道导航及面部表情识别这样的任务虽然艰难,但它们却根本比不上进行模拟(如模拟狗的行为)的复杂程度。
华盛顿大学与艾伦人工智能研究所之间的这一合作成果,论文将在6月份在CVPR上发表(译者注:CVPR-IEEE Conference on Computer Vision and Pattern Recognition的缩写,即IEEE国际计算机视觉与模式识别会议。)。
大数据文摘后台回复“汪星人”下载论文。
通过这个项目,研究者试图让AI通过观察一只温顺的狗,来基础性地了解,怎样像狗一样行事。
为什么要进行此项工程呢?
研究者称,我们已经做了很多模拟感知的子任务,比如识别一个对象并提取它,但是在“理解智能代理人的动作与行为数据并在虚拟世界中呈现”方面却做的还远不够。
换句话说,我们需要模拟行动,不只是做一只眼睛,而是成为控制眼睛的枢纽。
那么为什么选择狗呢?
汪星人是具有足够复杂性的智能生物,“他们的目标和动机往往是先验未知的。”换句话说,狗很聪明,但我们不知道他们在想什么。
作为对这一研究项目的初步尝试,该团队希望通过密切监测狗并将其动作、行为和它所看到的环境相结合,来观察他们是否能够创建一个准确预测这些动作的系统。
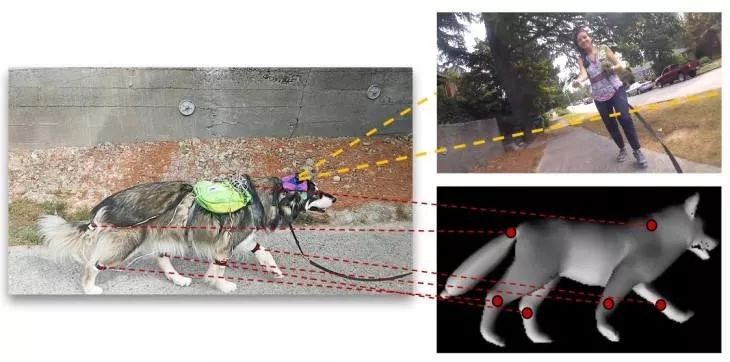
为了做到这一点,他们给一只叫Kelp的爱斯基摩犬装上了基本的传感器。在Kelp的头上有一个GoPro摄像头,六个惯性测量单元(腿,尾巴和躯干),可以判断所有物体的位置,一个麦克风和一个Arduino(开源硬件)将数据绑定在一起。
他们记录了Kelp数小时的活动——观察狗在各种环境中行走,取物,在狗公园玩耍,吃东西,将狗的动作同步到所看到的东西。其结果是狗环境中以自我为中心行动的数据集,或“DECADE”(他们用它来培训新的AI代理)。
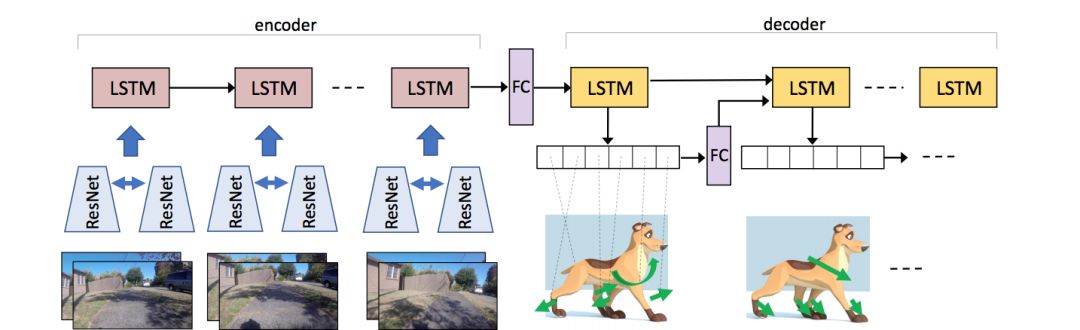
这位代理在给出某种感官上的输入后——比如说说一个房间或街道的景象,或者一个飞过它的球——会预测一只狗在这种情况下会做什么。当然,这样的预测不会严肃到细节水平——但即使只是想出如何移动它的身体以及在哪里完成也是一项非常重要的任务。
研究人员中的Hessam Bagherinezhad在一封电子邮件中解释道:“它学习了如何移动关节走路、如何在走路或跑步时避开障碍物、追逐松鼠、追随主人,在玩耍时追踪飞行的玩具等等。
这些是计算机视觉和机器人技术中的一些基本的AI任务,我们一直试图通过为每个任务收集单独的数据来解决这些问题(例如,运动规划,步行表面,物体检测,对象跟踪,人员识别)。”
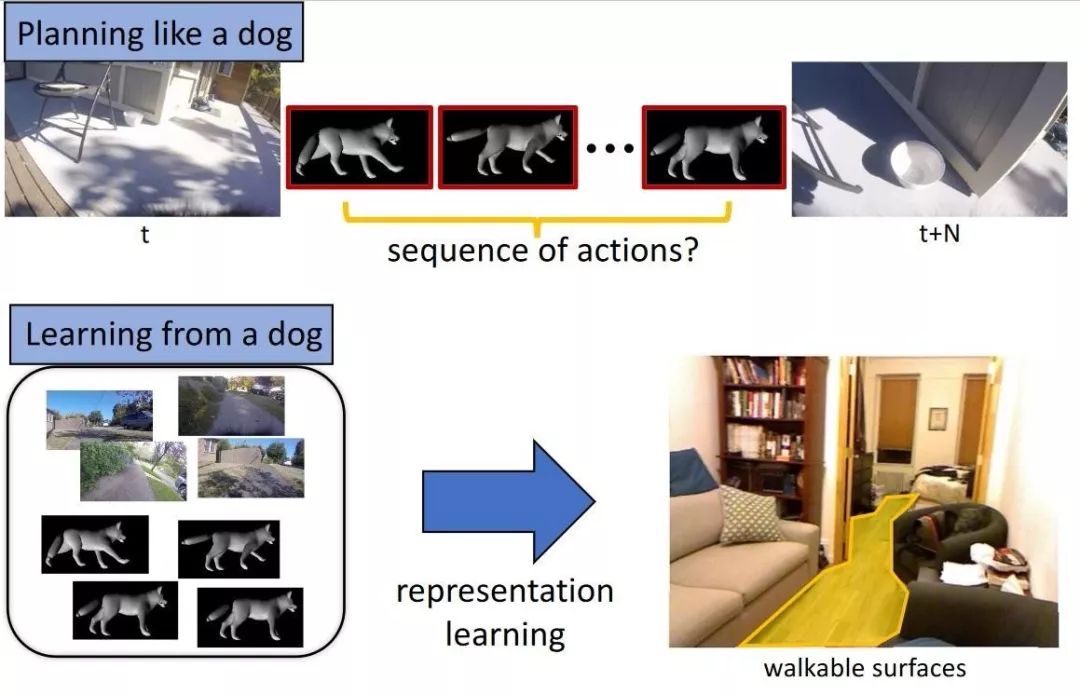
这可以产生一些相当复杂的数据:例如,狗模型必须像狗本身一样知道,当它需要从这里到达那里时哪里可以行走。它不能在树、汽车或沙发(依据房间信息)上行走。
通过模型也可以了解到,这项研究可以作为计算机视觉模型单独部署,以找出宠物(或小腿机器人)在给定场景中可以达到的位置。
研究人员说,这只是一个初步实验,虽然取得了成功,但成果有限。其他人可能会考虑引入更多的感官(嗅觉数据是很有必要的)数据,或者看看一只(或许多)狗产生的模型如何推广到更大范围。
他们总结道:“我们希望通过这项工作,为我们更好地理解视觉智能和其他智能生物铺平道路。”
相关报道:
https://www.theverge.com/platform/amp/2018/4/14/17234570/artificial-intelligence-dogs-research-science-learning from=singlemessage&isappinstalled=0
https://techcrunch.com/2018/04/11/whos-a-good-ai-dog-based-data-creates-a-canine-machine-learning-system/
【今日机器学习概念】

志愿者介绍
回复“志愿者”加入我们