导弹集群智能突防技术的新发展
当前,美国导弹防御武器的先进性和反导理论的前瞻性都走在了世界前端,其导弹防御体系日趋完备,作战空域从末段低层、末段高层、中段大气层外反导发展到尽早拦截、全程拦截,防御手段由动能直接碰撞式杀伤到高功率激光等多种方式,拦截目标由传统弹道导弹到临近空间高超声速武器,试验类型从单一靶弹发射点、单一拦截点转向多靶弹发射场、多拦截点,逐渐形成以亚洲、欧洲和中东地区为重点区域,以本土防御为后盾的天、空、海、陆全球一体化多层次的体系化、信息化和智能化的反导防御体系。
面对先进的导弹防御技术,传统的抛物线型弹道已经充分暴露出了易探测、机动性能差、弹道可预测等缺点,落后的隐身、预定程序突防、电子干扰突防和诱饵干扰突防等突防方式,都存在突防策略程序化、机动弹道固化、无法感知态势、无法主动作为的缺点。为突破先进的反导防御体系,导弹突防技术也朝着体系化、信息化和智能化的趋势不断发展。
伴随着战争自机械化转向信息化的过程,现代战争逐渐变成了各体系之间的对峙。传统导弹及其各自为战的作战方式在现代信息化战争中暴露了诸多问题,导弹武器协同作战问题引起了各国关注。
导弹集群系统是由空间信息联网构成的弹群网络,多枚同构或异构的导弹或弹头(如侦察型导弹、攻击型导弹和干扰型导弹等)通过无线网络技术实现无线组网。导弹集群系统通过集群内各个节点间的信息交互,完成功能、时间、空间等多个维度的协同,形成探测、干扰、突防和打击等多个能力的协同(如图1所示)。
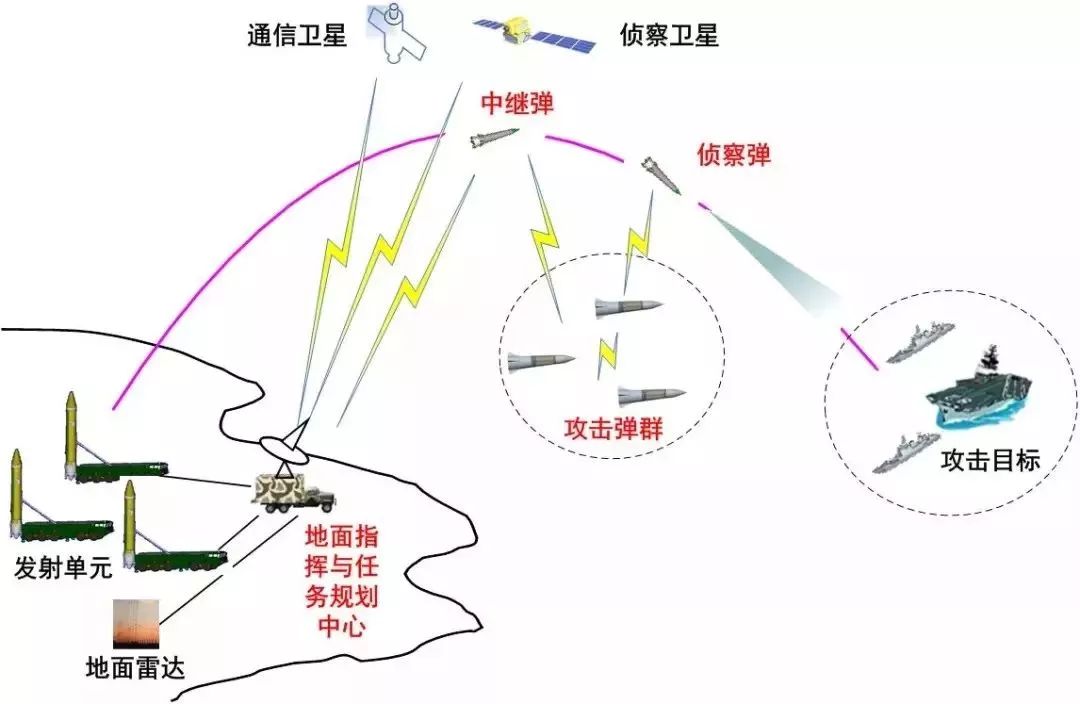
图1 导弹协同作战示意图
近年来,随着美国的协同作战能力(Cooperative Engagement Capability, CEC)构建设想的提出,协同作战模式首先在巡航导弹上得到了广泛应用。苏联的花岗岩导弹运用领弹协同作战模式,以领-从弹的高低搭配方式,将卫星、战术链等传输的数据信息进行融合处理,进而感知目标,实现了领弹与从弹的协同攻击。2002年,美国在NetFires研制计划中建立了巡航弹与精导弹协同作战的模式,在发射后可自动跟踪目标并在飞行后通过双向数据链更新数据,对战斗损伤评估;美国Raytheon公司于2010年将信息协同技术应用到Tomahawk导弹上,在飞行中通过双向卫星数据链,可以改变作战路线,攻击新目标。
相比于巡航导弹,弹道导弹速度快、机动能力有限、跨空域运动的特点给弹道导弹组网带来了新挑战。近年来,我国针对弹道导弹协同组网作战运用问题,大力开展相关研究。目前,弹道导弹组网协同仍处于技术研究阶段,其核心主要包括导弹集群编队技术和导弹集群协同编队控制技术。
1弹集群协同编队设计技术
队形设计是多弹协同编队(coordination formation flight)任务实现的关键。合理的队形设计需要充分考虑战场环境变化、作战任务动态需求、弹间通信冗余以及编队成员避碰等约束条件,实现最大限度减少成员相互干扰、提高编队适应战场能力。
在导弹编队飞行过程中,由于编队成员各自功能、任务等不尽相同,因此编队成员间需要保持一定的构型,如距离、间隔和高程差等。合理的编队队形,不仅能够增加编队飞行安全,有效躲过敌方雷达侦查,还可以最大限度发挥编队功能,顺利完成编队飞行任务。但是什么样的队形才是最合理的是队形设计的关键。
从国内外公开文献来看,几乎没有针对弹道导弹编队设计的相关研究成果,学者们多以相对简单的无人机编队为研究对象,重点研究编队构型的形成问题、移动中队形的维持与不同队形间切换问题、队形的空间变构型控制问题、队形的稳定性和鲁棒性问题、队形可实现的概率问题以及队形的分解与重构问题等关键问题,因此在导弹集群编队设计的过程中可以借鉴无人机编队的研究重点开展专门研究。
2导弹集群协同编队控制技术
协同编队控制技术是实现导弹集群作战的基础,近年来,多飞行器协同控制技术发展迅速。根据决策方式不同,多飞行器的协同控制可分为人在回路的远程决策与控制和自主协同决策与控制。根据控制结构方式的不同,多飞行器协同控制结构可分为集中式和分布式。多飞行器集中式控制方式是在中心控制站的统一指挥和控制下执行任务,具有良好的全局控制与决策能力,但是存在中心计算站计算任务重、对通信要求高等问题。多飞行器分布式控制方式通常采取协作的方式来解决全局控制问题,大量的计算和决策在飞行器本地进行,从而实现信息和控制的分散化。该控制方式的可靠性和灵活性大大改善,使编队具有较好的鲁棒性和稳定性,但是分布式要求飞行器的具有较高的自主能力。随着飞行器自主水平的提高和通信水平的提升,分布式协同控制逐渐成为发展的重点。
分布式协同控制主要面向飞行器的动态执行和自主求解,重点关注多飞行器如何在线自主地进行分布式任务决策、飞行器自主轨迹规划和航迹协调、飞行器编队飞行控制。较常用的研究思路包括两种,一种是自顶而下的思路,基于分层递阶求解思路,复杂问题被拆分为若干个较为简单的子问题。多飞行器之间通过协商和合作的方式协同完成对子问题的求解,从而实现任务的协同。主要方法包括基于合同网市场竞拍机制方法、分布式马尔科夫决策方法、动态分布式约束优化方法等等。一种是自下到上的思路,主要研究基于动态反应和行为规则的控制方法,重点强调动态环境下的个体反应,以及多个个体之间在已有规则约束下的行为协同,逐步形成了群集智能方法。主要方法有:基于人工信息素的方法,基于进化机制的多飞行器集群行为方法等。这些方法基于自下而上的数据驱动和建模方法,将简单对象整合聚类,全局的智能行为可由简单智能主体的聚集协同来实现,具有运算量小、鲁棒性强等诸多优点。
多智能体系统(Multi-agent Systems, MAS)作为一个崭新的领域而被广泛关注。与生物种群中的群体性行为类似,多智能体之间的协调与合作将极大增强个体的智能化程度,可具备单一个体无法实现的功能,展现出良好的群体智能。MAS具有鲁棒性强、智能化程度高等优点,因此,可将导弹集群视作MAS系统,并在此基础上研究导弹集群的编队控制问题。
当前,导弹突防最大的弱势在于导弹无法实时感知威胁,难以获得最新的攻防态势信息。以萨德系统为例,萨德系统以射击-瞄准-射击的拦截策略(如图2所示),在导弹防御的全过程中,拦截弹获得了来自于天基预警雷达的威胁信息、萨德雷达提供的目标轨迹信息、自身携带的导引头提供的目标信息,通过实时信息保障成功拦截。
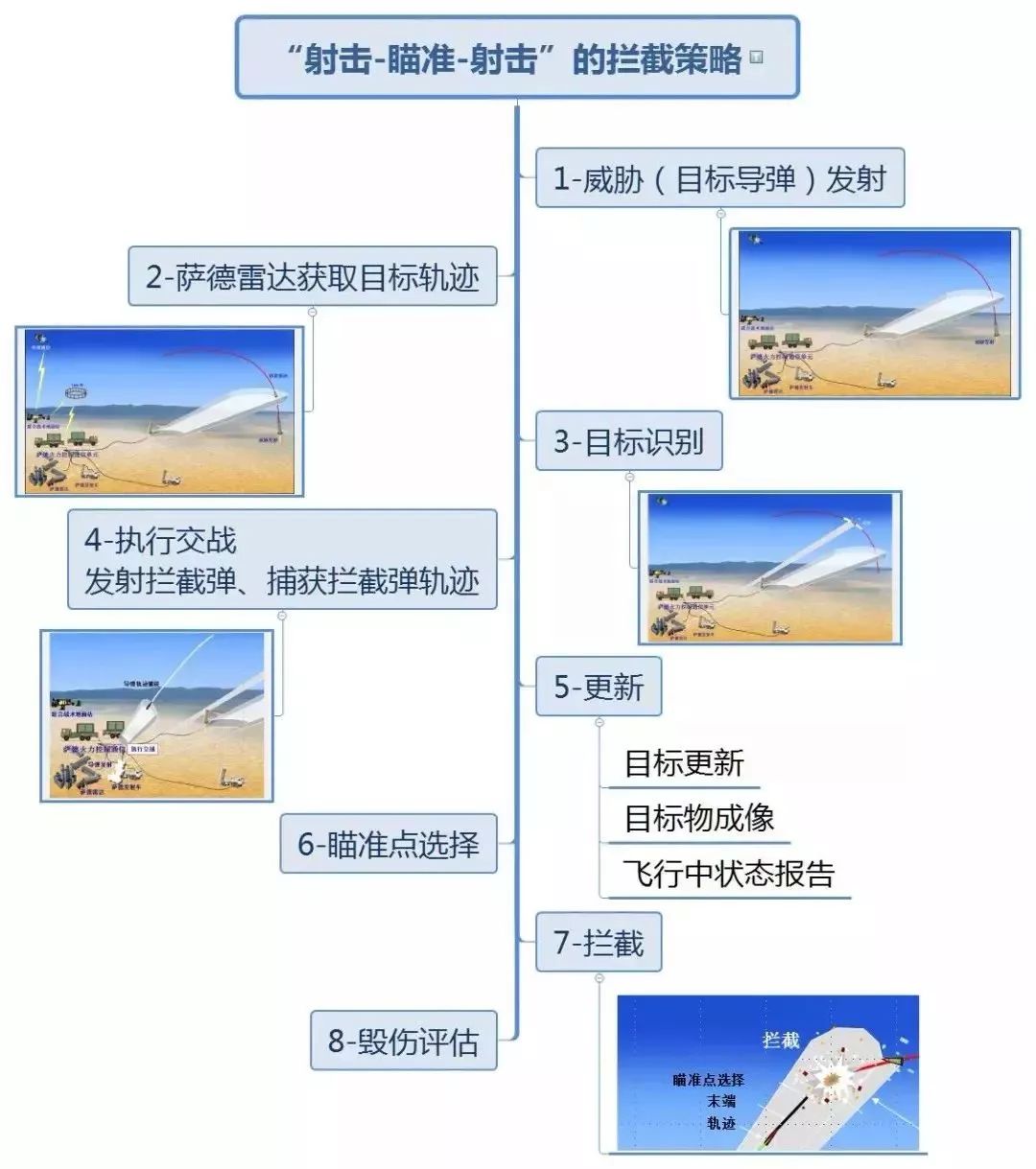
图2 萨德导弹工作流程
在主动规避式突防问题中,导弹面临的主要威胁即敌方拦截器,而突防的关键在于准确获取拦截弹的状态、机动时机、机动方向等信息。为了实现导弹集群的主动突防,必须以已知拦截弹的实时状态信息为基础,才能达到知己知彼,百战不殆的效果。
联合弹群网络的战场态势感知体系,主要依靠弹群自身获取的拦截弹的有效量测信息,对拦截弹的状态和性能进行精确判断,并通过与指挥控制中心之间的链路进行信息交互,实现对拦截弹威胁的准确评估。
目前,联合弹群网络的协同态势感知技术已经应用在部分巡航导弹和巡飞弹上,主要感知对象是目标而非拦截威胁。
美国战术战斧导弹能够在飞行过程中实现在线动态瞄准、传输自身飞行信息及评估敌方毁伤程度,在空中待机能力的支持下,可完成侦、控、打、评多维一体的战场任务。可见美国巡航导弹已有很强的态势感知能力,但利用导弹编队进行态势感知的研究成果还比较欠缺。
美国准备为在研的主宰者(Dominator)和洛卡斯(LOCASS)巡飞弹装配低性能传感器和简易程序,通过成批次、大规模巡飞弹协同,完成目标攻击。虽然单个传感器不具备较强的探测能力,但若群体最前端的巡飞弹实现近距离探测目标,便可立刻将探测到的信息数据传递给身后的巡飞弹,巡飞弹就会对目标实行群组攻击。这些巡飞弹构成的探测网络构成了简单的战场态势感知系统,实现了目标的自主探测,支撑了C4KISR架构,提高了弹药整体的作战效能。
俄罗斯П-700“花岗岩”超音速反舰导弹SS-N-19导弹,其前端的领弹与身后的攻击弹协同打击样式也充分反映了基于协同感知的导弹群组作战思想。领弹装配的高精度传感器首先探测到攻击目标,同时可将陆、海、空基传感器,甚至卫星获取的信息数据进行融合处理,共享目标信息,继而进行在线任务规划,自主完成打击任务。
在“以量取胜”的传统思维指引下,逐步发展形成了单弹的多弹头(分导式多弹头、子母弹群和集束式弹头)突防模式以及弹群饱和攻击模式。
针对日益凸显的非传统弹道导弹威胁,美国正在大力研发新一代的多目标杀伤器(MOKV)技术。MOKV负载高精度传感器,采用姿态轨道控制和目标判别等先进技术,辅以一定规模的饱和攻击,可在大气层外对弹道导弹自由段的弹头、诱饵等目标有效判别并实施拦截(如图3所示)。美国导弹防御局2014年开始研制的通用杀伤器(CKV)项目旨在拥有多平台部署和多目标杀伤能力,在第一研发阶段重新设计的杀伤器(RKV)是当前大气层外杀伤器(EKV)的升级和补充,与试验记录不佳的EKV相比,RKV拥有更好的机动性和瞄准能力;2016年开始研发的多目标杀伤器(MOKV),针对敌方的洲际弹道导弹(ICBM),预实现由路基拦截导弹(GBI)负载,释放后可完成对多目标(多弹头、多诱饵弹)的识别与拦截。

图3 多目标杀伤器概念图
防御技术的发展催生和促进着突防攻击技术的提高,运用预设的既定规律的程序式机动突防策略的导弹的突防能力不断下降,学者们逐渐开始研究导弹的智能突防技术。
有文献针对传统比例导引模型的导弹拦截系统,基于威胁告警设计了一种智能机动方法;Shiner基于极大值原理将二维运动学模型进行线性化,分析了Bang-Bang控制形式的最优规避机动制导策略;Kim和Beard等针对传统比例导引的地空拦截系统推导了基于人工智能的梯度神经网络和基于模糊逻辑的编队机动控制算法以实现飞行器的机动突防;也有应用LQ微分方法设计了最优规避及决策算法,制定了反舰导弹反拦截机动的策略;也有基于攻防双方末速度近似为定值的背景,采用微分策略设计了高空的机动突防方法,以逆比例制导作为突防控制,推导得到垂直于制导面的视线方向为最优推力方向;针对拦截系统导弹制导律可能未知的情况,研究了基于有限时间 H2性能指标计算办法及保性能控制策略,探讨了如何在能耗最省的前提下完成使敌方达到最大脱靶量的突防机动。
虽然就导弹的智能突防问题已有很多研究成果,但以下问题还有待进一步研究:
(1)现阶段研究大多是将机动突防过程抽象为二人追逃问题,进攻方突防成功与否的衡量标准是拦截导弹的最大脱靶量,而运用最优控制和微分对策等相关理论求解得到的最大脱靶量并未考虑到突防后对目标打击精度的影响,因此不具备一体化实战化应用优势。
(2)现多采用比例导引的运动学模型对拦截导弹进行建模,但拦截系统的反应时间等信息并未考虑,因此模型准确性有一定偏差。
(3)现阶段主要以单弹突防模式研究为主,并未进一步讨论多弹形式。当以群组突防为研究背景时,在多弹间防碰、弹间通讯等前提约束下,应对反拦截机动时对队形的影响以及机动后是否还具备协同攻击的能力等问题展开深入的研究。
传统的“一对一”攻防对抗可抽象为典型的博弈问题,但多对多的攻防对抗并不能简单的分解为多个“一对一”的问题,群体内的协作是提高突防效果的关键。群体意图并非独立,其与个体意图相关且并存,是群组内个体意图的聚合与协同并最终反映于个体思维中;群体行为的执行效果取决于分解到个体行为后的执行效果。因此,可以建立导弹集群和拦截弹群之间的攻防博弈过程,研究对群体意图、个体意图、群体行为和个体行为间的关系,求解导弹集群中各个导弹/弹头的机动时刻和机动控制指令,实现导弹集群的智能突防决策。
结束语
本文针对导弹集群智能突防问题,从导弹集群编队协同、联合弹群网络的协同态势感知和导弹集群智能突防三个方面展开分析,结合军事需求和研究现状,提出了导弹突防问题的未来发展方向及研究趋势,即体系化、信息化与智能化,可为导弹集群突防进一步研究提供一定参考:
(1)体系化弹道导弹组网协同集群编队设计及控制技术进一步研究可借鉴多无人机编队、多智能体系统和分布式协同控制等重点展开;
(2)信息化导弹集群协同感知当前巡航导弹已具有较强的战场态势感知能力,下一步可重点研究导弹集群编队的协同态势感知技术。
(3)智能化导弹群组博弈突防在“一对一”单弹突防的基础上进一步研究“多对多”模式的导弹集群攻防博弈过程,以实现集群智能突防。
本文转载自《战术导弹技术》2018年第5期
作者丨张凯杰,林浩申,夏冰





