最新! 国际语音顶级会议ICASSP2022最佳论文出炉, 美国范德堡大学和澳大利亚国大等获最佳论文,中科院LSEC等获最佳学生
【导读】ICASSP (International Conference on Acoustics, Speech and Signal Processing) 即国际声学、语音与信号处理会议,是IEEE主办的全世界最大的,也是最全面的信号处理及其应用方面的顶级会议,在国际上享有盛誉并具有广泛的学术影响力。ICASSP 2022线上会议和新加坡会场的会议仍将在5月7至13日和5月22至27日如期举行。

详情可登陆以下会议官网查询:
https://2022.ieeeicassp.org/conference_policies.php/
「最佳论文奖」(Best Paper Award)

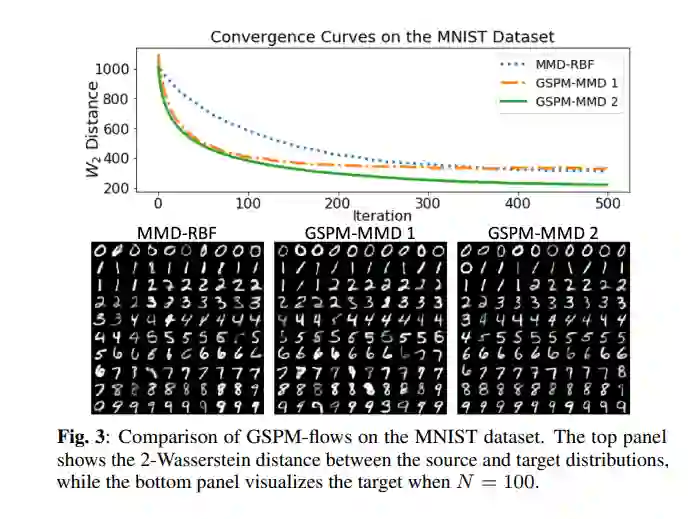
切片概率度量在机器学习中越来越受欢迎,它们在各种应用中扮演着典型的角色,包括统计假设检验和生成式建模。然而,在实际环境中,建立在这些距离上的算法的收敛行为还没有很好地建立起来,除了一些特定的情况。本文基于将高维分布切片成一维边集的思想,引入了一种新的切片概率度量族——广义切片概率度量(GSPMs)。我们证明GSPMs是真正的度量,它们与最大平均偏差(MMD)有关。利用这一关系,我们考虑了基于GSPM的梯度流,并表明,在温和的假设下,梯度流收敛到全局最优。最后,我们证明了各种GSPMs的选择导致了新的正定核,可以在MMD公式中使用,同时提供了独特的积分几何解释。我们举例说明了GSPMs在梯度流中的应用。
https://ieeexplore.ieee.org/document/9746016

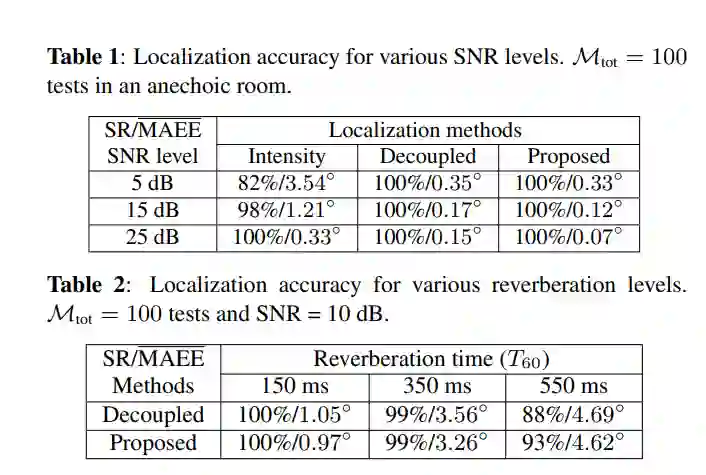
相对谐波系数(RHC)最近作为一种多麦克风空间特征被引入,当应用于到达方向(DOA)估计时显示出了良好的性能。现有的基于RHC的DOA估计器由于固有的基于网格的搜索而受到分辨率的限制。与此相反,本文利用一阶RHC通过推导指向期望源方向的方向矢量,提出了一种闭合形式的DOA估计器。采用定位精度和算法复杂度两个客观指标,分别在模拟和现实环境中与现有的基于RHC和基于强度的定位方法进行了评估和比较。
「最佳学生论文奖」(Best Student Paper Award)
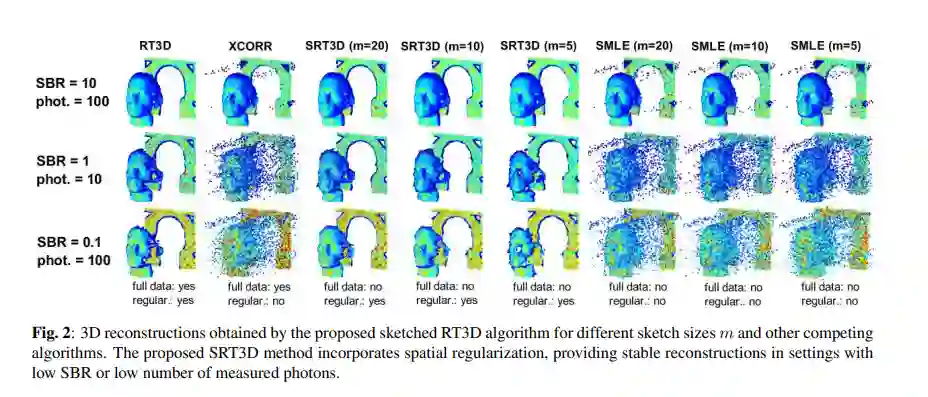
单光子光探测和测距(激光雷达)捕获三维场景的深度和强度信息。根据观测到的光子重建场景是一项具有挑战性的任务,因为与背景光源相关的虚假检测。为了解决这一问题,有大量的三维重建算法利用自然场景的空间规律性来提供稳定的重建。然而,现有的大多数算法的计算和存储复杂度与记录光子的数量成正比。这种复杂性阻碍了它们在每秒获取数十亿光子的现代激光雷达阵列上的实时部署。利用最近的激光雷达草图框架,我们表明,它是可能的修改现有的重建算法,这样他们只需要一个光子信息的小草图。特别地,我们提出了一种最新的先进算法的草图版本,该算法使用点云去噪来提供空间正则化重建。在真实的激光雷达数据集上进行的一系列实验表明,在实现与全数据情况相同的重构性能的同时,执行时间和内存需求显著减少。
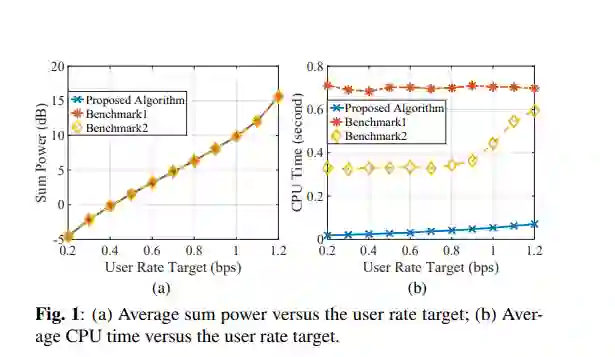
考虑协同蜂窝网络中的联合波束形成和量化问题,即多个中继型基站通过限速前置链路连接到中央处理器,协同服务于用户。该问题可表示为在所有用户的信干扰加噪声比(SINR)约束和所有类中继BSs的前馈速率约束下,使总发射功率最小。本文首先通过给出所考虑问题的半定松弛(SDR)的紧性,证明了所考虑问题与其拉格朗日对偶之间不存在对偶间隙。然后我们提出了一个基于拉格朗日对偶的有效算法来求解所考虑的问题。该算法明智地利用问题的KKT (Karush-Kuhn-Tucker)条件的特殊结构,通过两次不动点迭代找到满足KKT条件的解。该算法具有很高的效率(在两次不动点迭代中计算函数的成本都很低),并保证能找到问题的全局解。仿真结果表明了该算法的有效性和正确性。

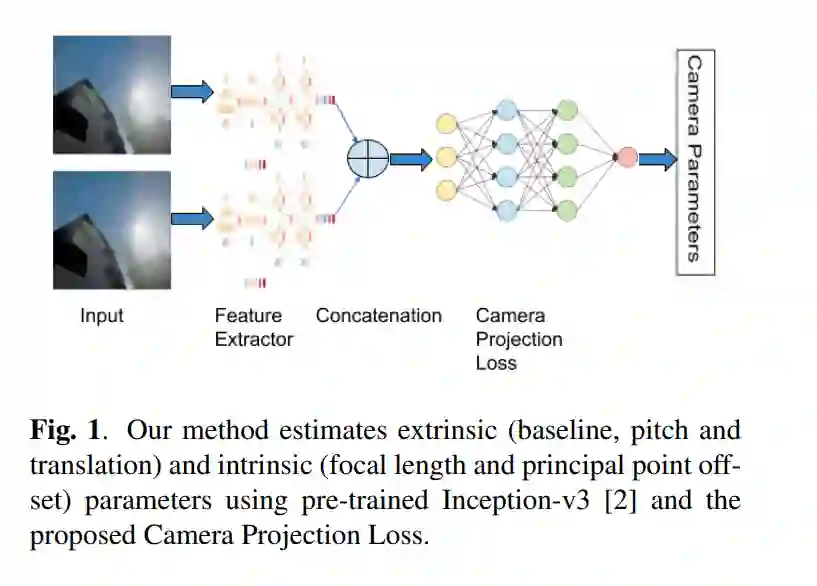
在包括三维重建、机器人交互的手眼协调、自动驾驶等各种任务中,摄像机标定是必不可少的。我们提出了一种利用图像对来预测外部(基线、间距和平移)、内部(焦距和主点偏移)参数的新方法。与现有的方法不同,我们没有设计端到端解决方案,而是提出了一种新的表示,将相机模型方程作为多任务学习框架中的神经网络。我们通过新的摄像机投影损失(CPL)来估计所需的参数,该方法利用摄像机模型神经网络重建三维点,并利用重建损失来估计摄像机参数。据我们所知,我们是第一种通过多任务学习方法联合估计内、外参数的方法,该方法结合了学习框架中的解析方程来估计摄像机参数。在此基础上,提出了一种基于CARLA Simulator[1]的CVGL摄像机标定数据集。在经验上,我们证明,我们提出的方法在使用合成和真实数据评估的10个参数中的8个上,与基于深度学习和传统方法相比,取得了更好的性能。我们的代码和生成的数据集可以在https://github.com/thanif/Camera-Calibrationthrough-Camera-Projection-Loss上找到。
「最佳工业论文奖」(Best Paper Award for Industry)
专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“ICAS2022” 就可以获取《最新! 语音顶级会议ICASSP2022最佳论文出炉, 美国范德堡大学和澳大利亚国立大学等获最佳论文,中科院LSEC等获最佳学生》专知下载链接




