OpenCV相机标定与畸变校正(附代码)

极市导读
本文详细介绍了相机标定的定义、原理和程序实现步骤,并提供制作标定板、相机标定和校正畸变图像的代码。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
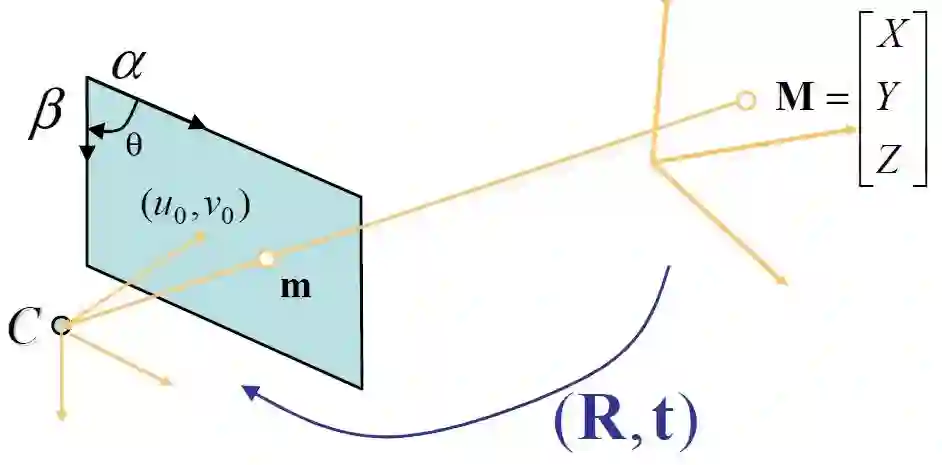
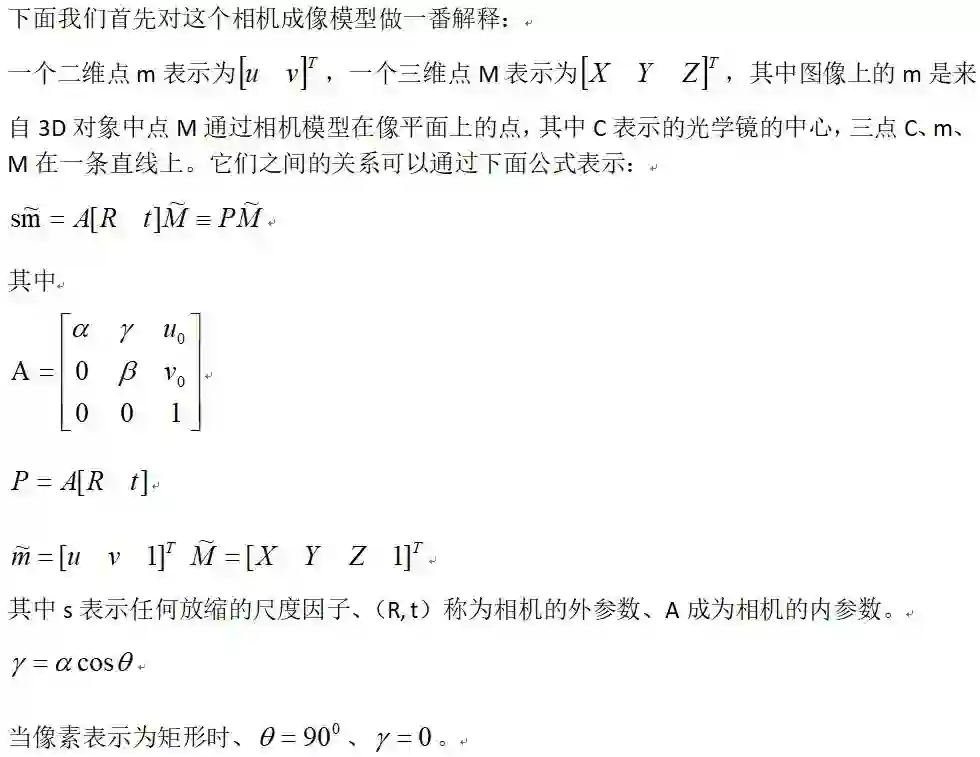
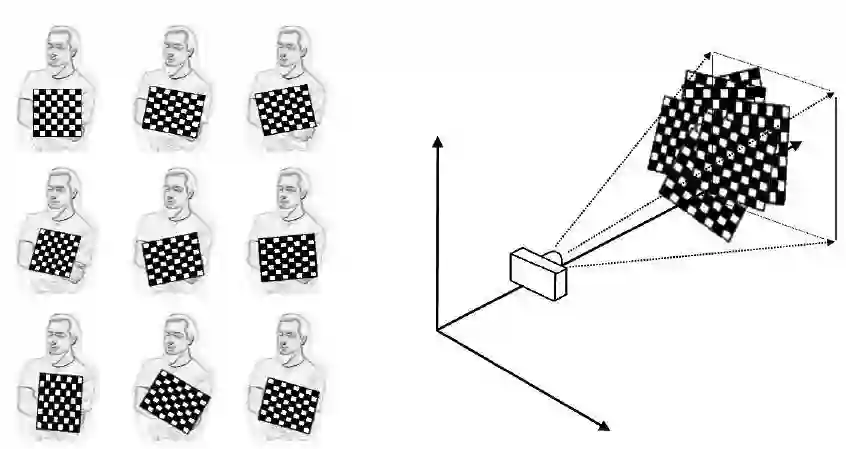
01 相机标定定义与原理
-
单目相机标定 -
双目相机标定
-
基于3D对象参照标定 -
基于2D平面标定 -
基于1D线性标定 -
自标定
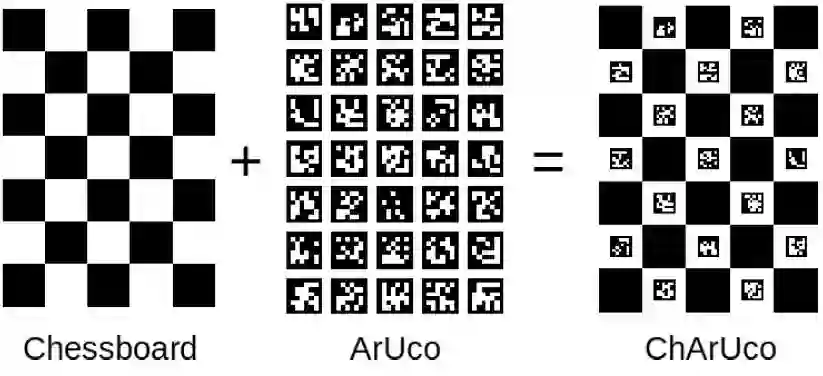
02 标定板介绍与制作
-
Chessboard -
Circel-grid -
RandPattern -
ArUco -
ChArUc
03 制作标定版与图像生成
void create_images() {
Mat frame;
VideoCapture capture(
0);
int index =
1;
while (true) {
bool ret = capture.read(frame);
flip(frame, frame,
1);
if (!ret)
break;
imshow(
"frame", frame);
char c = waitKey(
50);
printf(
"%d ", c);
if (c ==
113) { // Q
imwrite(format(
"D:/images/zsxq/%d.png", index), frame);
index +=
1;
}
if (c ==
27) {
break; // ESC
}
}
capture.release();
}
04 相机标定程序实现
1. 定义相机标定的相关常量设置与变量
// load image files
vector<string> files;
glob(
"D:/images/camera2d", files);
// 定义变量
vector<vector<Point2f>> imagePoints;
vector<vector<Point3f>> objectPoints;
TermCriteria criteria = TermCriteria(TermCriteria::EPS + TermCriteria::MAX_ITER,
30,
0.001);
int numCornersHor =
7;
int numCornersVer =
7;
int numSquares =
50;
vector<Point3f> obj;
for (int i =
0; i < numCornersHor; i++)
for (int j =
0; j < numCornersVer; j++)
obj.push_back(Point3f((float)j * numSquares, (float)i * numSquares,
0));
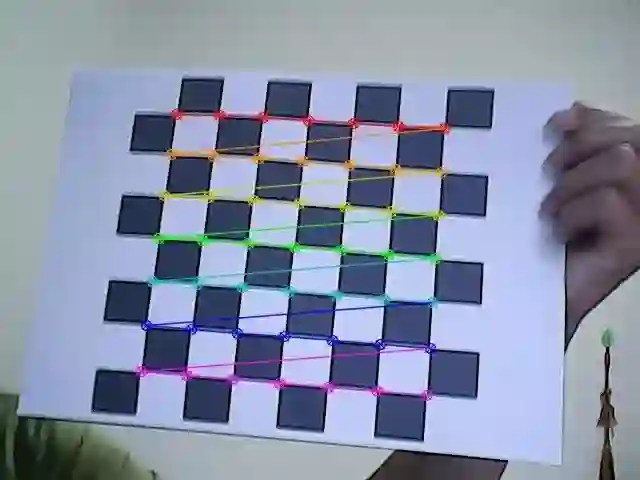
2. 发现与绘制棋盘格位置
// 发现棋盘格与绘制
Size s;
for (int i =
0; i < files.size(); i++) {
printf(
"image file : %s
", files[i].c_str());
Mat image = imread(files[i]);
s = image.size();
Mat gray;
cvtColor(image, gray, COLOR_BGR2GRAY);
vector<Point2f> corners;
bool ret = findChessboardCorners(gray, Size(
7,
7), corners, CALIB_CB_ADAPTIVE_THRESH | CALIB_CB_FILTER_QUADS);
if (ret) {
cornerSubPix(gray, corners, Size(
11,
11), Size(
-1,
-1), criteria);
drawChessboardCorners(image, Size(
7,
7), corners, ret);
imagePoints.push_back(corners);
objectPoints.push_back(obj);
imshow(
"calibration-demo", image);
waitKey(
500);
}
}
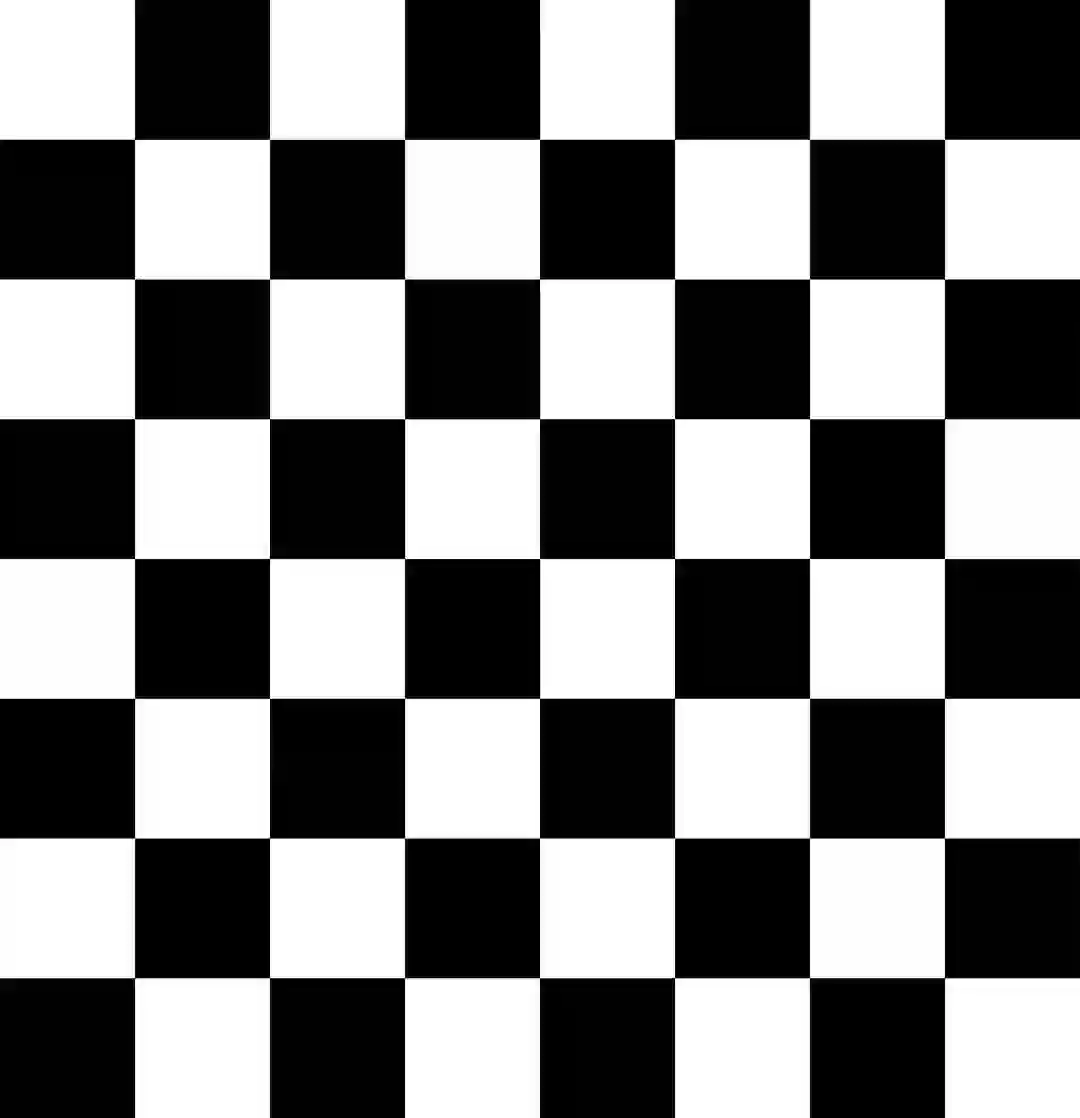
3. 发现棋盘格显示如下(我是直接打印OpenCV自带那张图的)
4. 相机校正-计算内参数
// 相机校正Mat intrinsic = Mat(3, 3, CV_32FC1);Mat distCoeffs;vector<Mat> rvecs;vector<Mat> tvecs;intrinsic.ptr<
float>(0)[0] = 1;intrinsic.ptr<
float>(1)[1] = 1;calibrateCamera(objectPoints, imagePoints, s, intrinsic, distCoeffs, rvecs, tvecs);
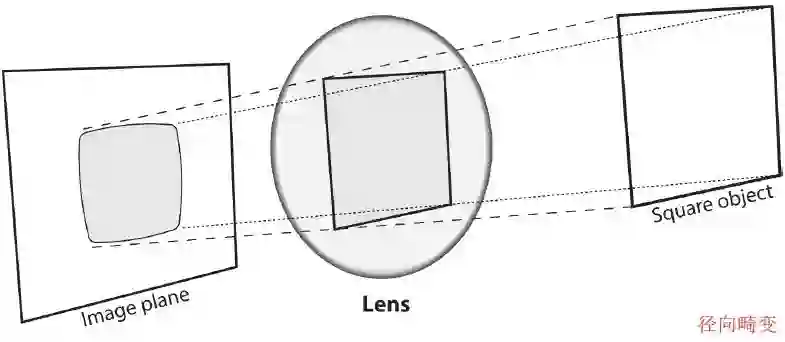
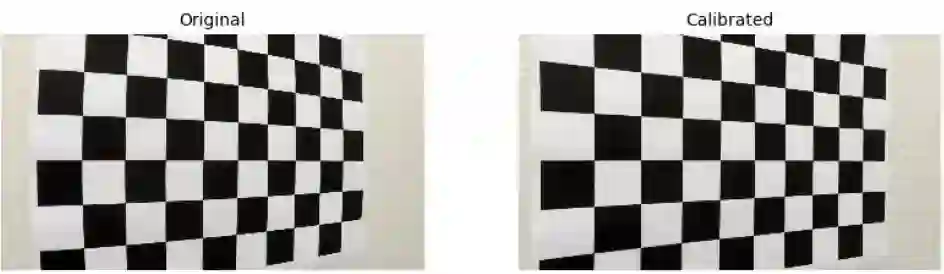
05 畸变图像校正
// 畸变校正
for (int i =
0; i < files.size(); i++) {
Mat dst;
Mat image = imread(files[i]);
undistort(image, dst, intrinsic, distCoeffs);
imshow(
"image", image);
imshow(
"undistort image", dst);
waitKey(
1000);
}
公众号后台回复“项目实践”获取50+CV项目实践机会~

# 极市原创作者激励计划 #

“
点击阅读原文进入CV社区
收获更多技术干货
登录查看更多
相关内容
专知会员服务
132+阅读 · 2020年3月22日


相关VIP内容
专知会员服务
132+阅读 · 2020年3月22日
相关资讯
相关论文