智能网联交通技术发展现状及趋势
本文综述了智能网联交通技术发展现状及趋势。智能网联交通系统的技术体系架构是一个集车辆自动化、网络互联化和系统集成化三维于一体的高新技术发展架构。
其关键技术模块包括感知模块、融合预测模块、规划模块和控制模块等 4 个关键部分。智能网联交通系统提出从「普通的车、聪明的路」,或者说是「聪明的系统」起步,逐步发展到「聪明的车、聪明的路」的高级阶段,其对提高道路交通效率、改善交通安全、节约能源等均具有积极意义。

本文来自2018年6月15日出版的《 汽车安全与节能学报 》,作者是东南大学-威斯康星大学智能网联交通联合研究院冉斌教授、谭华春、张健和曲栩。
智能交通系统是缓解交通拥堵、提高交通安全、改善交通污染的重要技术手段。随着人工智能、移动互联、大数据等新一代信息技术的迅速发展,以自动驾驶为主要特点的新一代智能交通系统逐渐成为解决交通问题新的突破口。
智能交通系统的发展包含 3 个阶段:
第 1 阶段为动态感知,即实现覆盖全网道路的交通信息实时获取,并建立动态感知的大数据平台;
第 2 阶段为主动管理,即提供主动规划、主动交通管控、主动指挥调度、主动公众服务等动态管理服务;
第 3 阶段为智能网联,即实现车联网、车路协同、自动驾驶等。
智能网联交通系统作为智能交通系统的终极发展形式,是物联网技术在交通运输领域的重要应用。其通过雷达、视频等先进的车、路感知设备对道路交通环境进行实时高精度感知,按照约定的通信协议和数据交互标准,实现车与车、车与路、车与人以及车与道路交通设施间的通讯、信息交换以及控制指令执行,最终形成智能化交通管理控制、智能化动态信息服务以及网联车辆自动驾驶的一体化智能网络系统。广义上,智能网联交通系统涵盖了智能网联汽车系统与智能网联道路系统,即智能网联车 [1]、车联网、主动道路管理系统、自动公路系统等均包含于智能网联交通系统。
本文提出了智能网联交通的技术体系架构,分析了其技术特点及发展优势,对其关键技术的发展现状及趋势进行了梳理,并对中国发展智能网联交通系统提出了思考与建议。
1. 智能网联交通技术体系架构
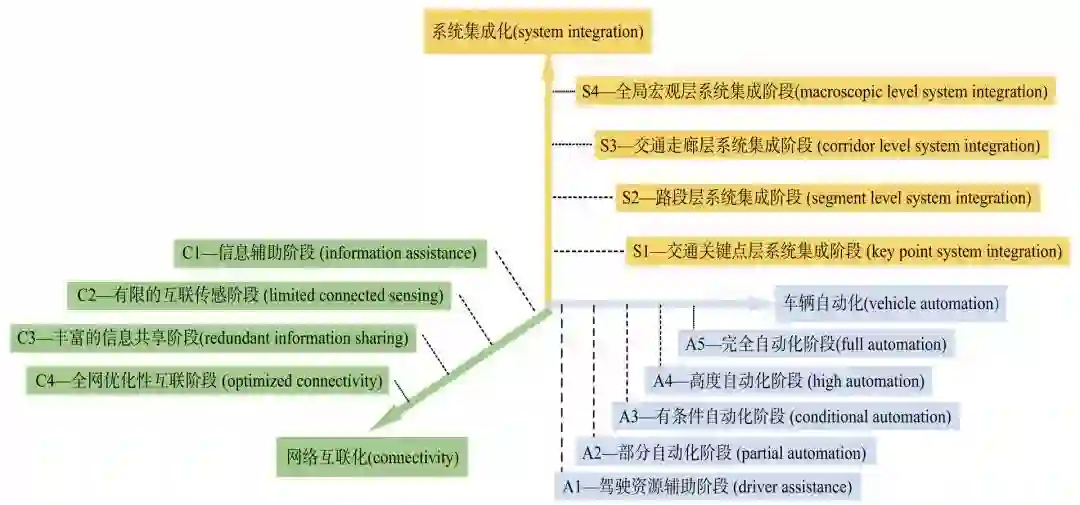
图 1 智能网联交通系统三维体系发展架构
智能网联交通技术体系集中应用了人工智能、传感技术、网络技术、计算技术及自动控制技术等,是一个集车辆自动化、网络互联化和系统集成化三维于一体的高新技术发展架构,其体系发展架构如图 1 所示。
1.1 三维一体发展架构
1)车辆自动化
车辆的自动化发展从低到高可以分为驾驶资源辅助、部分自动化、有条件自动化、高度自动化和完全自动化 [2] 5 个阶段。
a)驾驶资源辅助阶段:在适用的设计范围下,自动驾驶系统可持续执行横向或纵向的车辆运动控制某一子任务(不可同时执行),由驾驶员执行其他的动态任务。
b)部分自动化阶段:在适用的设计范围下,自动驾驶系统可持续执行横向或纵向的车辆运动控制任务,驾驶员负责执行目标和意外检测与响应(target and accident detection and response, OEDR)任务并监督自动驾驶系统。
c)有条件自动化阶段:在适用的设计范围下,自动驾驶系统可以持续执行完整的动态驾驶任务,用户需要在系统失效时接受系统的干预请求,及时做出响应。
d)高度自动化阶段:在适用的设计范围下,自动驾驶系统可以执行完整的动态驾驶任务和动态驾驶任务支援,用户无需对系统请求做出回应。
e)完全自动化阶段:自动驾驶系统能在所有道路环境执行完整的动态驾驶任务和动态驾驶任务支援,驾驶员无需介入。
2)网络互联化
网络互联化发展主要包含信息辅助、有限的互联传感、丰富的信息共享和全网优化性互联 4 个阶段:
a)信息辅助阶段:驾驶员通过路侧设备获取路况信息,从而辅助驾驶和决策。
b)有限的互联传感阶段:驾驶员和车辆通过车内设备,以及路侧设备,获取相关信息,从而进一步辅助驾驶及进行决策。
c)丰富的信息共享阶段:驾驶员和车辆之间通过车内设备、路侧设备、全网信息中心以及车辆间信息共享设备获得更多层面的信息。不同车辆之间,通过各自认可的驾驶方式进行驾驶和决策,其中驾驶方式包括驾驶员驾驶、车辆自行驾驶、车辆服从全网信息中心指令驾驶。
d)全网优化性互联阶段:全交通网络的信息不再过载和重复,驾驶员和车辆获得优化后的信息,迅速地进行安全驾驶和最优的行驶决策。
3)系统集成化
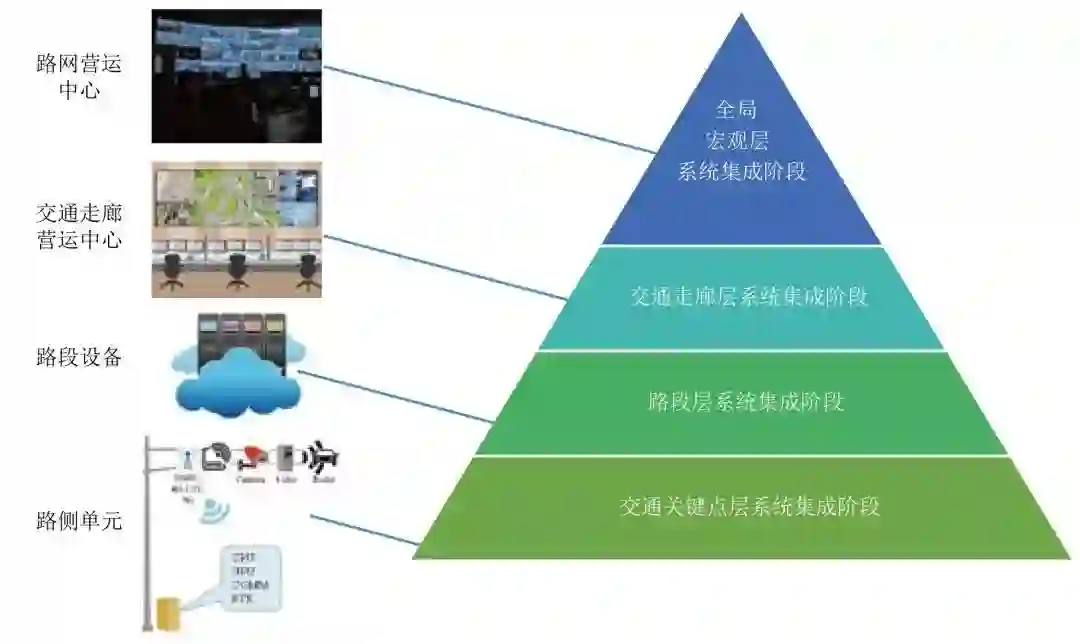
图 2 智能网联交通系统集成化发展阶段示意图
系统集成化的发展需要经历交通关键点层系统集成、路段层系统集成、交通走廊层系统集成和全局宏观层系统集成 4 个阶段,见图 2 所示
a)交通关键点层系统集成阶段:网联车辆在交通关键点与路侧设备进行信息交互,获得指令和必要信息,在各个交通关键点处解决具体事件,保障各微观节点的交通畅通和安全。该阶段的目标是实现交通关键点以及周边小区域的交通优化控制。
b)路段层系统集成阶段:网联车辆与微观交通控制中心联结,获取指令与信息,通过指令在路段层面解决微观问题。这一阶段的目标是以单个路段为单位对交通进行管理和控制。
c)交通走廊层系统集成阶段:网联车辆与中观控制中心联结获取出行路径规划。中观控制中心合理控制走廊层面的交通流量,提前预测拥堵事件,合理建议全局系统进行全局规划。本阶段针对路网交通运行具有重要影响的交通走廊,由上一阶段的路段控制整合形成,从而支持更高级的控制算法,实现走廊层面的交通优化管理与控制。
d)全局宏观层系统集成阶段:从最高层级优化交通分配,提高出行效率,降低人员出行成本和社会物流成本,实现全路网范围的全局优化管控。
1.2 系统关键模块

图 3 智能网联交通系统发展路径
就技术发展路径而言,目前智能网联交通系统分为 2 个发展方向,即智能网联汽车和智能网联道路,如图 3 所示。IT 企业、车企和运营企业主要开展以车为主的智能网联汽车技术研究;道路交通行业以路为主进行智能网联道路系统研究。智能网联交通系统融合了智能网联汽车与智能网联道路的技术优势,协调发展,最终实现自动驾驶。
智能网联交通系统包括感知模块、融合预测模块、规划模块和控制模块等 4 个关键部分。在系统集成化不同阶段,关键模块参与程度不同,如表 1 所示:
表 1 智能网联交通系统关键模块参与程度

1)感知模块:实现道路线形估计及环境感知、静态交通状态及动静态障碍物检测与识别、车辆状态估计及运动补偿、高精地图或无地图定位等功能,为路侧单元融合预测模块提供必要的数据支撑,并为路侧单元规划模块提供真实交通模型。
2)融合预测模块:实现路侧感知信息与车辆感知信息融合、多传感器前向信息融合、多传感器多方向信息融合、多车信息融合、车辆轨迹预测、路段交通状态预测、路网交通状态预测等功能。路侧单元与车辆感知设备的信息融合能够提升感知精度,路段多车辆信息融合实现路段状态精准识别。
3)规划模块:路网层规划以路网效率、安全和能源消耗为目标,实现最优化;路段层规划根据路网层规划模块结果,对车辆队列、跟车间距等参数进行规划;路侧单元规划以车辆轨迹预测算法为核心,完成车辆行为及运动的规划、推理、决策等。
4)控制模块:路网层实现路网交叉口协调控制;路段层实现车队队列控制;路侧单元发送控制指令到车载单元,实现对汽车方向盘、油门、刹车等执行机构的控制。紧急状态下,如通信中断时,控制权移交至车载单元,车载单元以安全为目标控制车辆。
1.3 系统关键技术
智能网联交通系统融合智能汽车与智能道路的技术优势,涉及汽车、道路交通、计算机、通讯等诸多领域,其包括六大关键技术及两大保障体系。
1)六大关键技术
a)全时空智慧感知技术:以路侧感知设备为主实现全路网全息信息感知,主要包括道路环境感知、路侧单元 360° 图像采集、车辆状态感知、高精度定位、
车路协同感知、动静态交通状态感知等技术。
b)大数据技术:智能网联交通系统需完成大批量数据处理,实时挖掘有效交通信息,实现融合预测和路网优化控制等功能,主要包括人工智能、深度学习算法、智能预测、数据融合、图像识别、自适应优化控制等技术。
c)云平台技术:系统集成化终极阶段时,需要大量的存储和计算资源,利用云平台技术实现路侧设备、路段和路网信息共享和交互等功能,主要包括智能网联交通可视化技术、智能网联云平台大数据中心、基于智能网联云服务大数据框架等。
d)动态交互处理技术:路网层、路段层及路侧设备实时进行数据交互,实现区域路网最优是系统主要特点之一,动态交互处理技术十分关键,主要包括实时数据交互、全方位数据处理、动态数据发布、深度数据挖掘等技术。
e)I2X(infrastructure to everything) 通信技术:智能网联交通系统中不仅需要车车通讯(vehicle to vehicle,V2V),路车通讯 (infrastructure to vehicle,I2V) 和路侧设备通讯(infrastructure to infrastructure,I2I) 也很重要,通信技术主要包括专用短程通信技术(dedicated short range communications, DSRC)、第 4 代移动通信技术-LTE 网络制式 (the 4th generation mobile communication technology-long term evolution, 4G LTE)、 第 5 代移动通信技术(the 5th generation mobile communication technology,5G) 等。
f)智能控制技术:车队控制、车辆纵向控制、车辆横向控制、区域路网信号控制等技术。
2)两大保障体系(如图 4 所示)
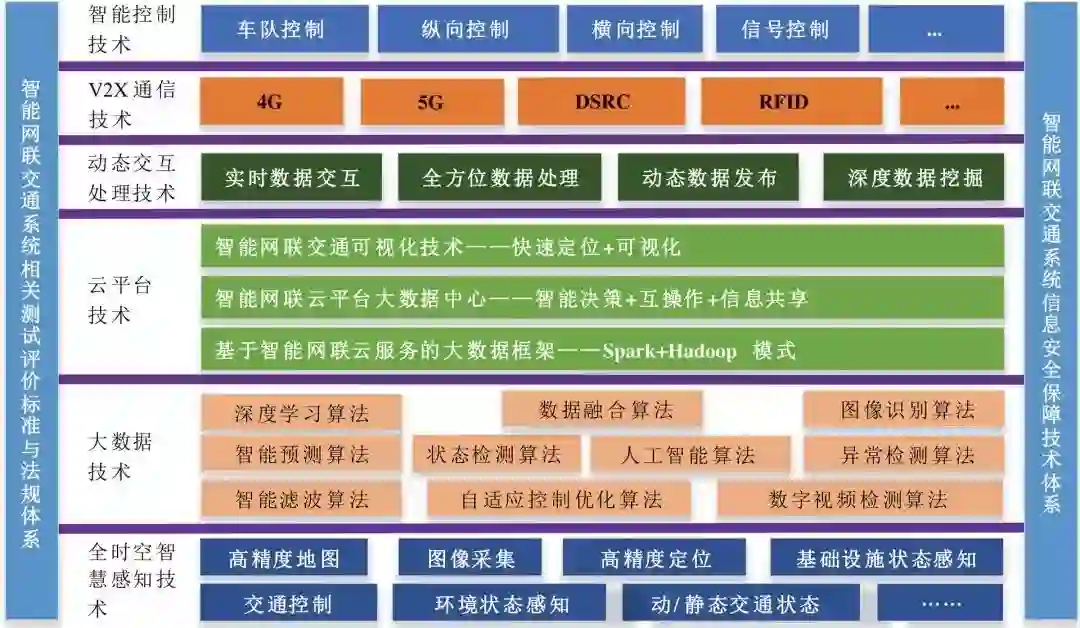
图 4 智能网联交通系统技术架构
a)智能网联交通系统相关测试评价标准与法规体系:加强车路一体化智能网联交通系统相关法律、伦理和社会问题研究,建立保障车路一体化智能网联交通系统健康发展的法律法规和伦理道德框架。
b)智能网联交通系统信息安全保障技术体系:形成智能网联交通系统信息安全管理要求,制定相关信息安全技术标准,完善信息安全测试规范,建立智能网联交通系统信息安全应急响应体系。
2. 智能网联交通系统技术特点及对道路交通系统的影响
2.1 技术特点
目前世界上主要的自动驾驶技术路线大多是以车为智能主体的解决方案。其主要应用毫米波雷达、激光雷达、视频摄像机等先进的车载感知设备,将汽车打造成极为聪明的移动智能体。而智能网联交通系统与以车为主的自动驾驶技术路线有所不同,其提出从「普通的车、聪明的路」,或者说是「聪明的系统」起步,逐步发展到「聪明的车、聪明的路」的高级阶段,其主要技术特点如下:
1)智能网联交通系统具有车路协同感知能力,其将部分原本仅安装在智能车辆上的感知设备布设到道路基础设施上(路侧端),这样路侧固定的感知设备可为所有通行的车辆提供感知支持,通过车路协同感知使智能车辆的感知能力更强,而普通车辆不需安装昂贵的感知设备也能够获得较为全面的感知能力。
2)智能网联交通系统具有协同规划、全局决策的能力。通过整合路段或路网的车辆运动信息(位置、速度、加速度)、相对运动信息(相对位置和速度)以及环境和道路基础设施信息,计算全局系统最优的自动驾驶方案,最终形成智能化交通管理、智能化动态信息服务和网联车辆自动驾驶的一体化智能网络系统。
3)智能网联交通系统下的车辆控制由安装在道路基础设施上的路侧控制系统和车载的控制系统共同完成。这样可以更有利于多辆智能车间的协同换道、协同避险等协同控制。同时由于感知信息可以通过路侧系统进行多车间的共享,根据共享的感知信息,车辆可以以更小的跟驰安全车距进行编队行驶,更有效地提高道路通行能力。
4)智能网联交通系统是车路一体化的自动驾驶系统,其感知系统、控制系统、通讯系统、信息安全系统等可实现车路多重备份配置,使系统的安全性、稳定性更高,保证自动驾驶车辆的安全运行。
2.2 对道路交通系统的影响
智能网联交通系统有助于提高道路通行效率
研究表明,车辆自动化可以大幅提升道路通行能力,Shladover 等分析在 10%、50% 和 90% 的市场占有率情况下,仅部署协作式自适应巡航控制(cooperative adaptive cruise control,CACC)的车辆便能够分别增加 1%、21% 和 80% 的道路通行能力 [3]。车辆的网联化可使自动驾驶车辆通过车-车通信获取周围车辆的运行信息,并考虑周围车辆对目标车辆跟驰和换道行为的影响,把握预测驾驶员的未来驾驶行为,相应准确量化目标车辆加速度产生变化,从而有效进行平滑速度控制和改善交通流稳定性 [4-7]。
Talebpour 和 Mahmassani 研究发现智能网联车和自动驾驶车都能提高交通流稳定性和提高道路通行能力,具有网联化和自动化功能的车辆相比单一功能的车辆在交通流稳定性和道路通行能力有明显提升,并且网联化车辆相比自动化车辆具有更好的控制效果 [8]。
Wang 等提出了两种跟驰控制系统(自动化和网联化),分别在 5%、10%、50%、100% 的智能网联车辆占比情况下进行试验,结果表明网联化控制系统比自动化控制系统能够增加系统的交通流量 [9]。Ran 和 Tsao 研究表明自动驾驶技术配合专用道大幅减少驾驶反应时间和降低行车间距,进而提升道路通行能力(相关计算示例如图5所示)[10]。
Pueboobpaphan 等的研究表明,通过汽车与道路设施(V2I)的车辆通信,优化控制主线及匝道车辆速度,可以有效减少系统旅行时间 [11]。Wang 等基于车路通讯技术构建一种网联化可变限速控制系统,提出了消解运动波的动态车辆速度控制策略,结果表明该控制系统能够有效提高道路通行能力[12]。
Xie 等开发了一个集中式纵向合流汇入控制器,在决策周期范围内(10s)实现全部自动驾驶车辆的速度最大化,通过上游4个区域的设置使车辆以恒定速度通过合流区,研究结果表明在车辆延误、平均速度和通过流量方面均优于无控制情况[13]。Letter 等基于车路通讯技术提出高速公路车辆纵向协同合流汇入算法,通过路侧检测设备实现车辆实时通信,研究结果表明在非拥堵条件下,该车路控制方法能够减少旅行时间,提高平均行程速度和通过交通量 [14]。
智能网联交通系统有助于改善道路交通安全
美国公路交通安全管理局(National Highway Traffic Safety Administration,NHTSA) 对自动驾驶和智能网联交通技术的应用进行了评估,研究结果认为:随着自动驾驶车辆比例的提升,将可以有效减少因道路交通事故导致的死亡人数;到 2050 年,道路交通事故死亡人数预计可减少为目前的 50%,每年减少约 1.7 万人;因道路交通事故产生的经济损失每年预计减少约 1900 亿美元[15]。
Li 等研究表明在 10%~100% 的车辆市场占有率情况下,仅部署自适应巡航控制(adaptive cruise control,ACC)的车辆能够在一定条件下减少 39.7%~67.8% 的高速公路交通碰撞风险。而部署自动化车辆和道路可变限速(variable speed limit,VSL)的协同控制策略,能够减少 48.1%~77.4% 的交通碰撞风险。对于不同的协作式自适应巡航车辆市场占有率(10%~100%)[16],Li 等研究发现部署该车辆便能够在指定交通情况下减少 19.3%~97.5% 的交通碰撞风险,而同时部署协作式自动化车辆和道路 VSL 策略对交通系统进行协同控制,能够减少 36.5%~98.5% 的高速公路碰撞风险 [17]。研究结果说明随着自动驾驶车辆比例的提升,能够有效减少交通碰撞风险的发生,进而有助于降低交通事故发生的概率,并且基于车路协同角度进行控制,能够降低车辆速度变化幅度和平滑交通流,进一步改善交通安全。
智能网联交通系统还有助于节约能源消耗
智能网联交通系统的各模块功能主要由路侧设备实现,从而减轻车辆设备冗余,提升车辆轻便化、灵活度,减少车辆能源消耗和尾气排放。
相关研究表明:车辆自动化在 L4 阶段时,所需安装的设备需要额外消耗 3%~20% 的能源,而智能网联交通系统实现的节能驾驶、车队行驶和交叉口互联等功能能够节省大约 9% 的能源消耗 [18],因此能够大大减少能源消耗。
Wang 等提出了一种基于横向最优控制的高级驾驶辅助系统(advanced driving assistant system, ADAS),研究表明在低密度(20 辆/km)情况下,可以减少 19.5% 的二氧化碳排放量;在高密度(40 辆/km)情况下,可以减少 9% 的二氧化碳排放量 [19]。
Rios-Torres 等基于车路协同集中式控制器提出一种改善安全且减少油耗的合流汇入控制算法,以加速度平方和最小化作为目标函数以及距离作为约束条件,确保每次仅有一个车辆占用合流汇入区域,结果表明该方法相比于无控制情况能够将车辆油耗降低 49.8% [20]。
Khondaker 和 Kattan 基于车路通信技术实时预测车辆的运动轨迹,以车辆群体总旅行时间最少、总事故风险最小和总燃料排放最少为目标约束条件,开展高速公路主线车辆群体可变限速控制研究,相关结果表明该控制能够有效减少车辆能源消耗 [21]。
3. 智能能网联交通关键技术发展现状
3.1 环境感知技术
环境感知系统的任务是利用摄像头、毫米波雷达、激光雷达等传感器以及 I2X 和 V2X 通信系统感知周围环境,通过提取路况信息、检测障碍物,为智能网联汽车提供决策依据。自动驾驶在感知技术方面主要有 3 大技术流派:Google 和百度等公司选用激光雷达为主的感知技术方案;苹果、Uber、Roadstar 等公司选用多传感器融合进行环境感知;特斯拉、驭势科技、Auto X 等公司选用摄像头为主的技术方案。
在视觉感知领域,由于近年深度学习在视觉感知领域取得较大的进展,相对于传统的计算机视觉技术,深度学习在视觉感知精度方面具有较大的优势。深度学习被认为是一种有效的解决方案,能够满足复杂路况下视觉感知的高精度需求,特别是传统算法识别较为困难的目标物识别 [22-23]。
在传感器领域,激光雷达凭借其分辨率高的优势,成为越来越多自动驾驶车辆的标配传感器,针对不同传感器感知能力和成本的差异,目前也涌现了不同车载传感器融合的感知方案,用以获取丰富的周边环境信息。
高精度地图与定位也作为自动驾驶中重要的环境信息来源,可针对视线盲区和不良视线等情况下进行环境信息采集,用以弥补视觉和雷达识别的劣势。目前自动驾驶通过比对车载全球定位系统(global positioning system,GPS)、惯性测量单元(inertial measurement uint,IMU)、激光探测与测量(lightdetection and ranging,LiDAR)或摄像头的数据精确进行定位,从而实现高精度的三维定位表征。国内外几大图商都在积极推进建设面向自动驾驶的高精度地图,将为自动驾驶车辆提供高精度定位方案。
3.2 智能决策技术
基于车辆周边环境和路侧感知信息,结合自动驾驶车辆的行驶意图及其当前位置,考虑安全、舒适、节能、高效的行驶目标,系统对车辆做出最合理的智能决策。目前自动驾驶主要有两大主流的智能决策方案:基于规则(rule based)的方案和终端到终端(end-to-end)的方案。
其中 rule based 方案需要人工搭建一个非常复杂的架构,需要人工设计上千个模块,可解释性较高。End-to-end 解决方案更接近于人类的驾驶习惯,即观察到人类观察的场景,通过神经网络处理后,产生类似于人类的驾驶行为。
而新兴的自动驾驶 end-to-end 方案能够将概率过程(probabilistic process)、博弈过程(game-theoretic process)、马尔可夫决策过程(Markov decision process)逐渐被应用到车辆行为规划的决策算法中 [24],能够考虑其他驾驶意图并整合到相关决策算法中,从而实现车辆之间无通信的情况下的协同决策。
车载决策系统和路侧决策系统的分工协作是需要研发的关键技术之一。
3.3 控制执行技术
控制系统任务是将行为决策的宏观指令解释为带有时间信息的轨迹曲线,从而控制车辆的速度与行驶方向,使其跟踪规划的速度曲线与路径。具体而言,控制执行技术是解决在一定的约束条件下优化某个范围内的时空路径问题,包括:1)车辆在一定时间段行驶轨迹(位置信息);2)整条轨迹的时间信息和车辆姿态(到达每个位置的时间、速度、加速度、曲率等)。
现有自动驾驶汽车多数采用传统的控制方法,如比例-积分-微分(proportional-intergoal-derivative,PID)控制、滑模控制、模糊控制、模型预测控制、自适应控制、鲁棒控制等 [1]。
中国目前对制动和控制关键技术已有一定研发基础,但是博世、德尔福等国外大型企业可根据实际交通情况调整参控制器参数,并应用在主动安全系统,与其相比,中国在控制稳定性和市场规模方面仍有较大差距。车载控制系统和路侧控制系统的协同控制是需要研发的关键技术之一。
3.4 I2X 和 V2X 通信技术
所有东西的基础设施(I2X)和车辆基础设施(V2X)指道路和车辆与系统内对其有影响的其他事物进行信息交互,是多种路侧和车载通信技术的统称,具体包括车辆基础设施(I2V)、车辆与基础设施(vehicle to infrastructure,V2I)、车辆对车辆(V2V)[25-27] 等。
I2X 和 V2X 通信技术可以通过无线通讯获得实时交通状况、道路信息、行人信息等一系列交通信息和驾驶控制信息,通过应用这些信息进而提高驾驶的安全性,减少交通拥堵,提升交通效率并提供车载娱乐服务 [28]。在 I2X 和 V2X 通信标准的应用上,主要采用 DSRC、4G LTE-V、 和 5G 方案 [29-30]。
3.5 网络安全技术
随着智能网联技术的不断发展,针对交通系统的安全攻击日益增多。当智能车辆的车载设备通过各种无线方式与其他相关设备或互联网相连时,网络安全问题随之产生。互联网原有的安全问题可能会派生到车载系统中,由于车辆自身是一个高速移动的信息系统,危害性会随之扩大。此外,智能网联交通系统根据采集的大数据,利用电脑和软件来进行机械化控制,这可能会使得安全风险进一步加大 [31]。
针对自动驾驶网联安全,美国于 2013 年制订了全世界首部汽车智能网联信息安全标准 SAE J3061 [32]。该标准的主要特征是从信息安全的全生命周期角度提出了相关的一些物理模型架构和开发流程。欧洲则是从汽车、开放式的汽车信息安全的平台、通信的环境这 3 个层级上构架智能网联信息安全的防护体系。日本信息处理推进机构于 2013 年公布了汽车信息安全模型 Approaches,为推进汽车信息安全防护提供了重要的参考 [33]。
在中国,汽车的信息安全和智能网联的信息安全逐渐受到关注并已成为一个新的热点 [34]。在交通运输部 IDS 标委会的推动下,针对《智能网联驾驶信息安全标准体系框架》等研究从体系架构、相关的测试方法和安全标准上给出了明确的标准和规范,从而多层面、多部委协调推动智能网联信息安全的标准建设 [35]。
3.6 车路协同技术
车路协同技术基于无线通信技术和传感检测技术等获取车辆和路侧设施的信息,并通过 V2V、V2I 通信进行信息交互和共享,从而优化利用系统资源,提高道路交通安全,缓解交通拥堵等[36]。
美国的车路协同(Vehicle Infrastructure Integration,VII)项目由美国州公路及运输协会、美国交通运输部和汽车制造商等多个机构联合开展,利用车辆间和车路间的通信构建多个系统以增强交通安全、交通运行效率和道路维护,同时满足车辆制造商和其他的私营企业的应用需求 [37]。
Smartway 是日本的车路协同项目,是日本建设智能交通系统的基础工作,用于促进土地、基础设施、运输和旅游及先进安全汽车的发展。利用由 DSRC、ITS 车载单元、数码地图和路侧传感器等多个元素构成的平台,该项目向车辆、驾驶员和道路管理者提供了多种应用服务。Smartway 系统平台涉及的服务具体包括电子不停车收费(electronic toll collection, ETC)等核心服务和与车辆巡航系统相关的道路交通信息通信系统(vehicle information communication system,VICS)服务等 [38]。
欧盟开展的 Esafety 项目用以构建基于车路协同的智能交通安全系统,从避免碰撞、减少伤亡和事故紧急处理等角度提升道路交通安全,具体包含智能速度调节系统、安全带提示、酒精锁车系统以及事件和行程数据记录仪等,大大提升了道路交通安全 [39]。
3.7 交通系统集成优化技术
交通系统集成优化技术主要利用 V2V 及 V2I 通信技术,实时感知获取智能网联车辆及其周边车辆的交通状态信息,通过交通系统优化技术形成优化控制方案或指令,再通过路侧控制单元发布交通状况信息及控制或诱导指令,使得车辆能够与其他车辆及路侧设施设备进行协同运作,从而大大提高交通系统的运行安全和效率[40]。
目前车路协同技术在交通系统运营方面的研究和应用主要针对高速公路汇入区域和城市道路信号交叉口处的交通流运行[41]。高速公路汇入辅助技术可以为入口匝道及重型交织区域的车辆驾驶员提供相应的咨询服务,当通信技术、传输技术和自动控制技术满足一定的精度要求时,高速公路协同汇入控制技术还可以监控和优化车辆的汇入轨迹 [42-43]。
弗吉尼亚大学基于 VISSIM 软件开展的仿真研究验证了汇入辅助技术对于提升安全性和运行效率方面的效果。同样是基于微观仿真环境,车辆的位置、速度和车头时距等信息常被用于解决交叉口处的交通拥堵问题,现有的研究大多以减少车辆延误和增加信号交叉口通行量为目标,主要形成 3 类算法 [44]:
第 1 类算法对于超饱和的交叉口,实时检测排队状况并调整交叉口处的信号相位,更高效地为车流分配绿灯信号 [45] ;
第 2 类的车辆分组算法通过实时监控主干路上的车队状况改善信号分配;
第 3 类研究为预测微观仿真算法,采用滚动时域的交通控制方案 [46],该类算法利用实时的车辆速度和位置数据 j 预测信号相位作用的目标时间间隔内的车辆延误,并由此确定下一个间隔采用的信号相位。
4. 智能网联交通关键技术发展趋势
4.1 基于深度增强学习的决策架构发展与应用
深度学习与增强学习是热门的机器学习方法,在处理自动驾驶决策方面,通过大量的学习实现对复杂工况的决策,并进行在线的学习优化。但是其失去了透明性,仅仅依赖于相关性推理,而非因果推理,导致综合性能不易评价,对未知工况的性能也不易明确。
而新的因果推理决策机制(如贝叶斯网络)具有模块化和透明性 2 个决定性优势,能够在数据处理方面,针对事件发生的概率以及事件可信度分析上具有良好的分类效果。
模块化能够将深度学习作为一个子模块,有效强化输出结果的可靠性,避免相关性的干扰。透明性是另一个主要优势,主要体现为对整个决策的过程进行分析,及时纠正非理性学习行为。
深度学习与增强学习可以同时有效应用于车载系统和路侧系统。
4.2 以视觉识别和激光雷达为代表的感知技术快速发展与应用
在实际驾驶过程中,驾驶员获取的信息绝大部分来自于视觉,如车身四周的机动车、非机动车、行人、动物、道路标识、道路本身、车道线等。而摄像头拥有最丰富的线性密度,其数据量远超其他类型的传感器。基于图像信息密度最高的优势,使得视频视觉识别处于整个感知融合的中心地位。但摄像头需要识别和估算的目标繁多,导致基于目标监测与识别的学习算法变得十分复杂。
激光雷达相对于毫米波雷达等其他传感器具有分辨率高、识别效果好等优点,已越来越成为主流的自动驾驶汽车用传感器,但其成本从根本上阻碍了自动驾驶汽车的普及与商用。目前激光雷达正在向着低成本、小型化的固态扫描或机械固态混合扫描形式发展,但仍存在量产规模和成本等问题。
由于计算机视觉领域在自动驾驶领域的应用潜力被低估,激光雷达的成本和性能已逐步支持商业化,多传感器的融合其实是商业化自动驾驶达到高可靠性的必由之路。多传感器融合如何同时在车载系统和路侧系统实现是比较关键的问题之一。
4.3 基于云计算技术的智能网联交通云平台的发展与应用
云计算技术通常采用分布式冗余存储方式,具有处理大规模数据和实现数据共享等特点。云计算技术提供的服务包含基础设施即服务(infrastructure as a service,IaaS)、平台即服务(platform as a service,PaaS)和软件即服务(software and services,SaaS)[47],目前云计算在交通领域已经得到了一些应用,如地理信息服务、路径诱导服务和信息发布应用等 [48]。
智能网联交通系统中大量数据存储和计算的需求,为云计算技术从概念层走向应用层提供了机遇,两者可以实现优势互补。而云计算技术应用在智能网联交通系统中尚处于初级阶段,
IaaS 层为智能网联交通系统提供处理、存储、网络和基本计算资源,允许部署路网层、路段层和路侧设备通用的应用;
PaaS 层提供服务,允许将路网层、路段层和路侧设备所需应用部署在云端;
SaaS 层可访问云供应商提供的服务应用。
如何建立完善的智能网联交通云平台、提高云服务的安全性将是智能网联交通技术发展的重要方向。
4.4 融合网联化智能技术的自动驾驶技术的发展与应用
相比于自主式智能车辆对周边环境的感知能力,网联化智能技术可以从时间维度和空间维度获取更多的交通信息,从而不仅提高单车的感知和决策能力,而且还能为车辆群体协同感知、决策提供条件。
基于 V2X 通信技术进行车-车、车-路实时信息交互和共享,从时间维度上提前获知或预测周边车辆运行、红绿灯等交通控制系统以及气象条件等信息,从空间维度上感知交叉路口盲区、弯道盲区、车辆遮挡盲区等位置的环境信息,实现自动驾驶车辆之间的协同与配合,能够大范围开展车辆主动安全控制和协同控制,包括自组编队长度控制、队列跟驰与换道策略以及车辆进出车队决策等。
网联化智能技术与自动化智能技术正加速融合发展,形成一种新的自动驾驶技术发展与应用趋势。但网联化技术受通讯传输距离以及传输延误和丢包等因素的影响,只有保证一定精度条件下才能帮助自动驾驶系统更全面掌握周边交通态势,进而开展大量相关的研究和应用。
4.5 基于车路一体化自动驾驶的交通系统优化技术发展与应用
基于车路一体化自动驾驶的交通系统将实现车路协同感知、车路协同决策和车路协同控制一体化等功能。
由政府主导的交通系统控制管理中心能够更有效地整合车企、IT 企业管理下的自动驾驶资源,从道路系统全局出发为各类不同出行方式和技术层次的出行者提供更安全更有效的自动驾驶出行服务:
车路协同感知一体化技术是以路侧感知设备为主、车辆感知为辅,实现全路全息和全维度的车路一体化感知,改善车辆感知能力的局限;
车路协同决策一体化以效率、安全和能源消耗作为车路一体化自动驾驶的交通系统优化目标,从路网最优角度出发,对关键节点、路段层、路网层等交通系统单元进行统一规划与优化;
车路协同控制一体化是结合道路系统全局最优的决策控制指令,根据单车和群体动力学理论,考虑单车和车辆群体能耗过程及相关影响因素,实现车辆运行安全、舒适、节能与环保的最终目标。
5. 中国发展智能网联交通系统的意义及政府部门的定位和作用
建设与发展智能网联交通系统对于中国具有重要的意义,主要体现在以下几点:
首先智能网联交通系统不仅仅考虑单一的机动车自动化问题,更致力于提出交通优化方案,解决交通问题;
其次,发展智能网联交通系统,能够大幅节约系统建设的时间和费用成本,可以让自动驾驶和智能公路系统更快地落地,预计可以提前 5~15 年让不同级别自动驾驶技术实现大规模产业化;
再次,智能网联交通系统框架下的一套标准的新型道路系统和基础设施,能够让各类互联网公司及汽车公司生产的自动/半自动驾驶车辆无障碍的共同行驶,从而更快地推进自动驾驶技术的推广与应用;
最后,发展智能网联交通系统,能够更有效地整合车企、IT 企业管理下的自动驾驶资源,从系统全局出发为各类不同出行方式和技术层次的出行者提供更安全、更有效的自动驾驶出行服务。
为了更好地发展智能网联交通系统,需要明确交通规划、建设、管理等政府部门的定位和作用,其主要包括以下方面:制定智能网联交通系统发展目标、顶层设计及实施路线图,引领智能网联交通系统测试基地建设,领导相关示范工程规划及实施,组织进行交通法规修订及完善,制定支持智能网联交通科研及产业发展宏观政策,对不同阶段智能网联交通系统实施效果进行评估,组织成立相关行业协会,开展针对智能网联交通相关的民众宣传与教育等。
6. 结语
结合感知、通讯、人工智能以及系统集成技术的不断更新与升级,智能网联交通系统为迅速发展车辆自动驾驶、解决交通问题提供了一种新的思路和实施途径。
与发达国家相比,中国在发展车辆自动驾驶、智能交通等方面还存在一定的差距,但智能网联交通系统所强调的车路一体化发展路线可以充分发挥中国的体制优势,我们相信,经过 10~15 年的发展,中国的智能网联交通系统一定能使中国的车辆自动驾驶、智能交通发展实现「弯道超车」,最终成为如高速铁路一样的中国面向世界的名片。
参考文献
[1] 李克强 , 戴一凡 , 李升波 , 等. 智能网联汽车 (ICV) 技术的发展现状及趋势 [J]. 汽车安全与节能学报 , 2017, 8(1):1-14
[2] SAE International. Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicle [R] (Standard J3016_201609). Warrendale, PA: Author , 2016
[3] Shladover S, Su D, Lu X Y. Impacts of cooperative adaptive cruise control on freeway traffic flow [J]. Transport Res Record: J Transport Res Board, 2012 (2324): 63-70
[4] Wang M, Hoogendoorn S P, Daamen W, et al. Game theoretic approach for predictive lane-changing and car following control [J]. Transport Res Part C: Emerg Tech, 2015, 58: 73-92
[5] Jin I G, Orosz G. Dynamics of connected vehicle systems with delayed acceleration feedback [J]. Transport Res Part C: Emerg Tech, 2014, 46: 46-64
[6] Talebpour A, Mahmassani H S, Hamdar S H. Modeling lane-changing behavior in a connected environment: A game theory approach [J]. Transport Res Procedia, 2015, 7: 420-440
[7] Guériau M, Billot R, El Faouzi N E, et al. How to assess the benefits of connected vehicles? A simulation framework for the design of cooperative traffic management strategies [J]. Transport ResPart C: Emerg Tech , 2016, 67: 266-279
[8] Talebpour A, Mahmassani H S. Influence of connected and autonomous vehicles on traffic flow stability and throughput [J]. Transport Res Part C: Emerg Tech, 2016, 71: 143-163
[9] Wang M, Daamen W, Hoogendoorn S P, et al. Cooperative car-following control: Distributed algorithm and impact on moving jam features [J]. IEEE Trans Intel Transport Syst, 2016, 17(5): 1459-1471
[10] Ran B, Tsao H S J. Traffic flow analysis for an automated highway system [C] // Proc Transport Res Board Annual Meeting, No. 960232, 1996
[11] Pueboobpaphan R, Liu F, Van Arem B. The impacts of a communication based merging assistant on traffic flows of manual and equipped vehicles at an on-ramp using traffic flow simulation[C] // Intel Transport Syst (ITSC), 2010; 13th Int’l IEEE Conf IEEE, 2010: 1468-1473
[12] Wang M, Daamen W, Hoogendoorn S P, et al. Connected variable speed limits control and car-following control with vehicle-infrastructure communication to resolve stop-and-go waves [J]. J Intel Transport Syst, 2016, 20(6): 559-572
[13] Xie Y, Zhang H, Gartner N H, et al. Collaborative merging strategy for freeway ramp operations in a connected and autonomous vehicles environment [J]. J Intel Transport Syst, 2017, 21(2): 136-147
[14] Letter C, Elefteriadou L. Efficient control of fully automated connected vehicles at freeway merge segments [J]. Transport Res Part C: Emerg Tech, 2017, 80: 190- 205
[15] National Highway Traffic Safety Administration (NHTSA). Vehicle-to-Vehicle Communication Technology for Light Vehicles: Preliminary Regulatory Impact Analysis[R]. United States Department of Transportation, Washington, D C: HTSA. FMVSS No150, 2016
[16] Li Y, Li Z, Wang H, et al. Evaluating the safety impact of adaptive cruise control in traffic oscillations on freeways [J]. Accid Anal Prev, 2017, 104: 137-145
[17] Li Y, Xu C, Xing L, et al. Integrated cooperative adaptive cruise and variable speed limit controls for reducing rear end collision risks near freeway bottlenecks based on micro-simulations [J]. IEEE Trans Intel Transport Syst, 2017, 18(11): 3157-3167
[18] Gawron J H, Keoleian G A, De Kleine R D, et al. Life cycle assessment of connected and automated vehicles: Sensing and computing subsystem and vehicle level effects [J]. Envir sci tech, 2018, 52(5): 3249-3256
[19] Wang M, Daamen W, Hoogendoorn S P, et al. Rolling horizon control framework for driver assistance systems. Part II: Cooperative sensing and cooperative control [J]. Transport Res part C: Emerg Tech, 2014, 40: 290-311
[20] Rios-Torres J, Malikopoulos A, Pisu P. Online optimal control of connected vehicles for efficient traffic flow at merging roads [C] // Intel Transport Syst (ITSC), 2015 IEEE 18th Int’l Conf IEEE, 2015: 2432-2437
[21] Khondaker B, Kattan L. Variable speed limit: A microscopic analysis in a connected vehicle environment [J]. Transport Res part C: Emerg Tech, 2015, 58: 146-159
[22] Erhan D, Szegedy C, Toshev A, et al. Scalable object detection using deep neural networks [C] // Proc IEEE Conf Compu Visi Patt Recog. 2014: 2147-2154
[23] Enzweiler M, Eigenstetter A, Schiele B, et al. Multi-cue pedestrian classification with partial occlusion handling [C] // Compu Visi Patt Recog (CVPR), 2010 IEEE Conf IEEE, 2010: 990-997
[24] Schwarting W, Alonso-Mora J, Rus D. Planning and decision-making for autonomous vehicles [J]. Ann Rev Contr, Robot, Auton Syst, 2018, 1(1): 87-210
[25] Chou C M, Li C Y, Chien W M, et al. A feasibility study on vehicle-to-infrastructure communication: WiFi vs. WiMAX [C] // Mobile Data Management: Systems, Services and Middleware, 2009. MDM'09. Tenth International Conference on. IEEE, 2009: 397-398
[26] Biswas S, Tatchikou R, Dion F. Vehicle-to-vehicle wireless communication protocols for enhancing highway traffic safety [J]. IEEE communications magazine, 2006, 44(1): 74-82
[27] Guille C, Gross G. A conceptual framework for the vehicle-to-grid (V2G) implementation [J]. Energy policy, 2009, 37(11): 4379-4390
[28] Weiß C. V2X communication in Europe–From research projects towards standardization and field testing of vehicle communication technology [J]. Computer Networks , 2011, 55(14): 3103-3119
[29] Cheng L, Henty B E, Stancil D D, et al. Mobile vehicle to-vehicle narrow-band channel measurement and characterization of the 5.9 GHz dedicated short range communication (DSRC) frequency band [J]. IEEE J Selected Areas in Communications , 2007, 25(8): 1501- 1516
[30] Chen S, Hu J, Shi Y, et al. LTE-V: A TD-LTE-based V2X solution for future vehicular network [J]. IEEE Internet of Things J, 2016, 3(6): 997-1005
[31] Schmittner C, Ma Z, Gruber T. Standardization challenges for safety and security of connected, automated and intelligent vehicles [C] // Connected Vehicles and Expo (ICCVE), 2014 International Conference on IEEE, 2014: 941-942
[32] Schmittner C, Ma Z, Reyes C, et al. Using SAE J3061 for automotive security requirement engineering [C] // International Conference on Computer Safety, Reliability, and Security. Springer, Cham, 2016: 157-170
[33] Schoitsch E, Schmittner C, Ma Z, et al. The need for safety and cyber-security co-engineering and standardization for highly automated automotive vehicles [M]. Advanced Microsystems for Automotive Applications 2015, Springer, Cham, 2016: 251-261
[34] 童淳强. 车联网信息安全 [J]. 中国公共安全 , 2016(6): 94-97
[35] 周艳芳, 李为为. 交通运输行业信息安全管理平台体系架构研究 [J]. 综合运输 , 2016(1): 69-73
[36] 罗亮红. 基于 ZlGBEE 的车路协同关键技术研究 [D]. 广州 : 华南理工大学 , 2010
[37] Farradyne P. Vehicle infrastructure integration (VII): Architecture and functional requirements [R]. Draft Version, 2005, 1
[38] Bishop R. A survey of intelligent vehicle applications worldwide [C] // Intel Vehic Sym, 2000. IV 2000. Proc IEEE. IEEE, 2000: 25-30
[39] Shell M. Final report of the European safety working group on road safety [R]. 2003. Available: http://europa.eu.int/informationsociety/activities/esafety/indexen.htm
[40] Zeng X, Balke K N, Songchitruksa P. Potential connected vehicle applications to enhance mobility, safety, and environmental security [R]. Southwest Region University Transportation Center, Texas Transportation Institute, Texas A & M University System, 2012
[41] Goodall N, Smith B, Park B. Traffic signal control with connected vehicles [J]. Transport Res Record: J Transport Res Board, 2013 (2381): 65-72
[42] Wang D, Chen Y, Ma J, et al. Expressway merge assistance method and evaluation based on connected vehicle technology [J]. J Highway and Transport Res Develop: English Edition, 2017, 11(4): 90-97
[43] Wang Y, Wenjuan E, Tang W, et al. Automated on-ramp merging control algorithm based on Internet-connected vehicles [J]. IET Intel Transport Syst, 2013, 7(4): 371-379
[44] Smith B L, Venkatanarayana R, Park H, et al. IntelliDriveSM traffic signal control algorithms [J]. Charlottesville, Virginia, 2011. 4: 9-36
[45] Ramkumar V, Hyungjun P, Lee S B. Application of intelliDriveSM to address oversaturated conditions on arterials [C] // TRB 90th Annual Meeting Compendium of Papers DVD. Washington, DC: Transportation Research Board. 2011: 1-17
[46] Feng Y, Head K L, Khoshmagham S, et al. A real-time adaptive signal control in a connected vehicle environment [J]. Transport Res Part C: Emerg Tech, 2015, 55: 460- 473
[47] Dinh H T, Lee C, Niyato D, et al. A survey of mobile cloud computing: Architecture, applications, and approaches [J]. Wireless communications and mobile computing, 2013, 13(18): 1587-1611
[48] 孙小红. 车联网的关键技术及应用研究[J]. 通信技术,2013(4):47-50
编辑整理:厚势分析师拉里佩
转载请注明来自厚势和厚势公号:iHoushi
车路协同相关资料下载
https://pan.baidu.com/s/1MEe2QbSb3Q_9N8Chm0Gy7Q



