德国费斯托又双叒叕更新,象鼻子机械臂+超逼真仿生手,比人手都强大

来源:机器人大讲堂
编辑:海蛟
摘要:在机器人领域,小编最佩服两家公司,一家是波士顿动力,另一家就是费斯托。费斯托这家源自德国的公司以平均每年更新2-3款仿生机器人的速度,扩充着它们的仿生机器人家族。这不最近,它们又对外发布了两个视频,一个是气动机械手,另一个就是模块化气动机械臂。
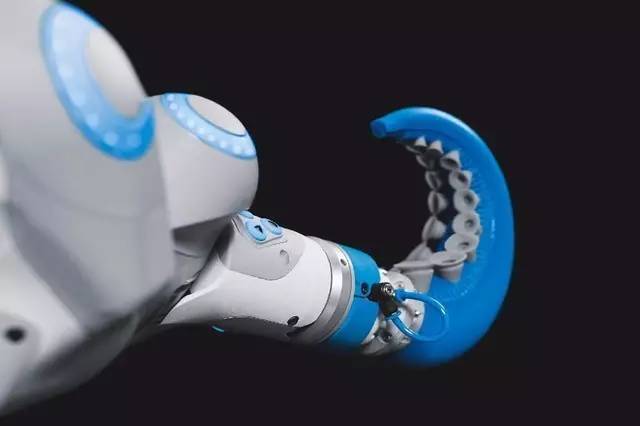
首先,是费斯托的气动机械手,虽然它比其他仿生手看起来更像人手,但却有着和人类手掌完全不一样的结构,因为它没有骨骼,完全依靠手指上的气动波纹管结构来控制动作。当气室充满空气时,手指弯曲;气室排空时,手指呈伸展状态。
拇指和食指中还装有旋转模型,使这两个手指可横向移动。通过这一设计,仿生机械手总共可实现12个自由度。

而且,除去柔性的结构,更重要的这款机械手还搭载了强化学习模块,这意味着这款机械手可以通过自我学习,来不断的优化自己的行动能力,最终成功完成布置给它的任务。
关于这款机械手,更详细的大家可以看下面的视频:
另一款“模块化气动机械臂”实际便是前年更新的“大象鼻子”的进化版。
升级之后的机械臂动作看起来更加柔性化,能够保持末端及其稳定的完成相应的移动工作,而且可以搭载更多的末端执行器。
而且,由于是类似于大象鼻子的设计,相比于普通的机械臂,它占用的操作空间会更小。
关于这款机械臂的详细信息,大家也可以观看下面的炫酷视频。
其实,观看这两款机器人,无法体会费斯托的强大。每次提到费斯托,我们还必须要做了便是盘点一下它的机器人家族。
下面让我们一起看看,这家公司的仿生机器人家族吧:
1.可自主飞行的「蝙蝠机器人」BionicFlyingFox
专门研制的翼膜通过约 45000 个点紧密地焊接在一起,所以具有足够的弹性,即使在收起双翼时,也几乎没有褶皱。蜂窝结构可以防止裂纹进一步扩大,即使翼膜出现轻微损伤,BionicFlyingFox 仍能继续飞行。
运动追踪系统的重要组成部分是两台红外相机,它们被安装在一个云台上,相机可以随意转动倾斜,以便追踪 BionicFlyingFox 的整个飞行过程。借助两翼与两条后肢的四个特殊红外标记,相机能够识别人造狐蝠的运动。
2.带“后空翻”技能包的「蜘蛛机器人」BionicWheelBot
另一个新型的蜘蛛机器人 BionicWheelBot 更有意思,它的原型是摩洛哥后翻蜘蛛,为了适应沙漠环境的生活,它有一种独特的行走方式,通过空中翻转与地面翻滚的组合来移动。而这样的驱动方式在仿生学中有重要意义。
在翻滚模式下,人工蜘蛛和自然界的摩洛哥后翻蜘蛛一样,可以比行走时更快地移动。这款机器人甚至能够应对高达 5% 的坡度。
3.蝾螈机器人

这个机器人看起来有点吓人,但它能像两栖动物一样爬行,穿过草地。它对研究蝾螈的中枢神经网络提供重要帮助。
它能像两栖动物一样爬行、扭动。
这个只有“白骨”的设计,不让人毛骨悚然才怪呢!
还有更牛的仿生鸟

Smartbird可以完美模拟
鸟类的飞行状态
甚至令人难辨真伪

它们像正常的鸟类一样
依靠翅膀提供飞行动力
它们的双翼不仅可以上下拍动,
还可以按照一定的角度进行扭转~
甚至连头都可以全角度转动。

飞翔和降落时,就像真的鸟一样。

除了仿生鸟
Festo的科学家们还造出了
仿生蜻蜓
仿生蜻蜓BionicOpter与真正的蜻蜓一样
能够向任意方向飞行。

它的四翼使用碳纤维
做成可折叠翅膀
每秒可以拍打20次

看到这么精密的机械结构
简直有种在做工程学设计的感觉

这款仿生蜻蜓
不但可以实现减速和急转弯
还能做到悬停和倒退。
甚至能够模拟直升机
除了水里游的、天上飞的,
Festo还创造出陆地上跑的:
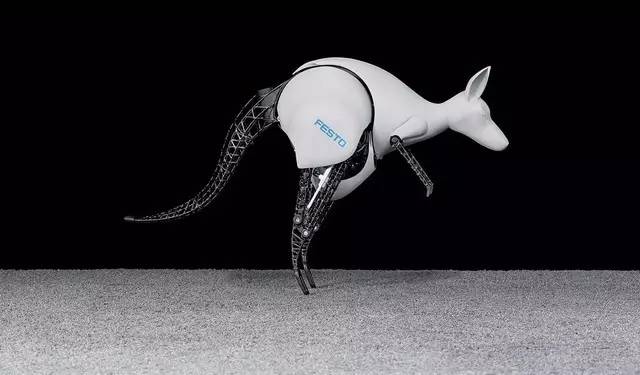
仿生袋鼠
仿生袋鼠BionicKangaroo
几乎完全复制了袋鼠的弹跳功夫
对机器人有一定了解的
科技客都知道
想让机器人“跳”起来
难度是很大的
而这只仿生袋鼠
却能够完成连续跳跃
甚至可以跳过40公分高的障碍物
因为它特有的蓄力功能
能及时从上一次跳跃中收集能量
为下一次跳跃做准备。
如果使用者戴上配套手环
就可以直接用手势控制袋鼠


除了上面提到的这些
最让人瞠目的还是这群3D打印的
仿生蚂蚁
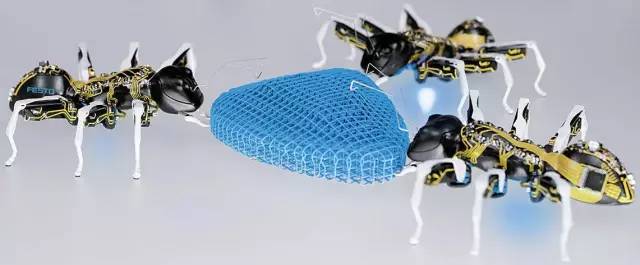
它们的头部配备摄像头
腹部配备传感器
可以随时进行红外导航
而触角则是天线
在快没电时
它们会第一时间爬去自行充电
更厉害的是
在搬运重物时它们会发挥“蚂蚁精神”
集体出动、协同合作
另外,做成
仿生象鼻
的万向自由度机械臂也很值得一说!

它具有12个自由度
可以更换不同的夹头
像象鼻一样
能够胜任各种柔性工作


仿生章鱼触手
这只仿生章鱼触手
和真的章鱼触手一样附有吸盘
整体采用可气动驱动的
柔软硅胶结构。
内置真空管
可以自主提供吸附动能
轻松完成抓、握等动作


未来智能实验室是人工智能学家与科学院相关机构联合成立的人工智能,互联网和脑科学交叉研究机构。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”






