
自主智能体技术的进步正通过支持侦察、障碍规避、路径规划与目标探测等多样化任务,变革多域作战模式。然而组建人类与自主智能体混合团队时,因双方“认知模型”及世界理解方式存在差异而产生挑战。本研究着力构建“联合认知系统”,旨在融合人类与自主智能体优势以提升“情报监视侦察(ISR)”“协同作战”“搜索救援(SAR)”及战场“医疗后送”等任务的协作效能。此类军事行动需协调具备多元能力与复杂“依存关系”的多智能体系统,对决策与资源管理构成严峻挑战。本文提出基于“协同设计”的方法优化指挥控制决策,聚焦多智能体系统内部任务分配与协调的“可观察性、可预测性与可导控性”(OPD)原则。该协同设计方法通过评估多智能体在各子任务中的相互“依存关系”及所需“能力”(如目标感知、障碍规避或区域值守),适用于“无人机”“有人驾驶载具”及“地面控制站人员”等多元团队。
所提出的“联合认知系统”(JCS)框架综合评估人机智能体的能力与依存关系,结合环境参数、任务要素及“在线监测”(状态与行为感知),动态推荐特定任务的最佳执行主体。研究通过在三维模拟环境中组织不同能力配置的人机混合团队执行“搜索救援任务”展开实验。团队配对设计旨在考察操作员如何发展差异化“能力水平”,进而促使自主智能体在各任务阶段提供相应层级的“支援”。测试八种机器学习算法后,最优模型的“任务分配预测准确率”达80%以上。研究核心在于探寻“人机控制权”的最优平衡,通过“预判失误”或检测操作员“失能状态”,最大限度避免“自动化滥用”以保障“有效人类决策权”。这有望推动未来“C2指挥控制系统”实现:采集感知数据(“观察”);辅助解析并“预判”态势(“预测”);优化团队内部任务“导控”(“可导控性”)。此类系统可增强“联合全域指挥控制”(JADC2)在分布式团队与混合编队资源管理中的作战效能,依托“人工智能”支撑加速决策进程。
联合全域指挥控制(JADC2)的未来
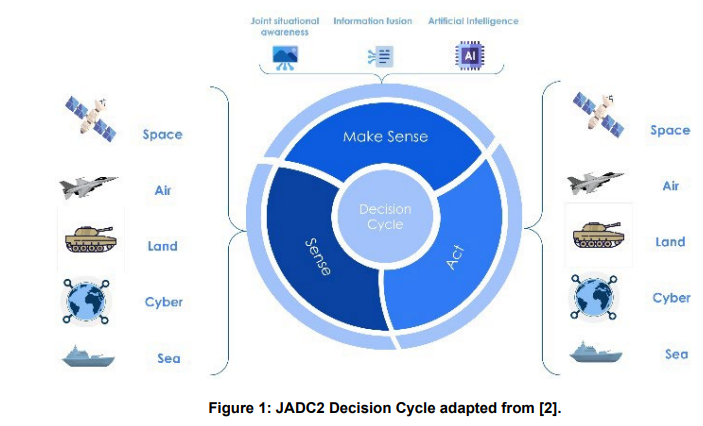
“联合全域指挥控制”(JADC2)代表一种复杂的决策模式,旨在快速整合全域作战能力以获取“竞争”与“冲突”场景中的战略优势[1]。根据文献[2]阐述,JADC2涵盖“感知”“研判”“行动”三大核心功能,贯穿“太空”“网络”“空中”“陆地”及“海洋”五大作战域[3]。该系统依托由先进传感技术构成的“多域传感体系”,包含“光电/红外成像”“高光谱成像”“雷达(无源/有源)”“声学传感器”及“侦察卫星”等设备。跨域数据流生成分布于不同时空维度的海量信息。“有效管理”这些数据对支持“作战管理”与“指挥决策”至关重要,需确保“精准情报”及时送达相应团队或“智能体”以实现预期作战效果。此类“数据点”要求构建统一的“多域网络”——通过整合“多源信息”(取代孤立数据管道)形成“全域联合态势感知图景”。这种“集成化路径”有助于“全面把握作战环境”。如图1所示,应用“机器学习”“人工智能”与“预测分析”能进一步优化该流程,提供“数据融合”与“快速解析”的高级能力,将感知图景转化为作战行动[2][3]。文献[4]强调,“指挥控制”的根本目标是确保“精准情报”及时交付相应决策者,从而彰显“敏捷性”并促进团队间“互操作性”。实现此目标需依托“量子通信”“人工智能(AI)”及“自主系统”等关键技术。未来JADC2将构筑“类云环境”,实现“情报共享”“态势监视”及“高速数据通信”以加速决策[2]至[5]。这些技术以远超人类的“处理速度”与“规模”实现数据快速解析。文献[4]着重指出“AI”与“机器学习(ML)”在自动化处理海量信息、支持决策流程中的整合作用。二者特别擅长在“动态多变量环境”中识别快速演变的“模式特征”,通过关联“地形”“气象”“行为模式”等离散情报源预判态势并响应环境变化[2]至[5]。在“未来指挥控制系统”中,AI有望跨“梯队”“作战域”及“作战资产”同步多重行动,从而把握“关键战机窗口”。此项能力在“无人地面载具(UGV)”“无人机(UAV)”“水下潜航器(UUV)”“水面艇(USV)”等搭载智能传感器的作战平台日益普及的战场尤为重要。AI赋能的系统可评估作战环境中“多源情报”,运用“历史数据”生成行动建议,从而减轻“认知负荷”并赋能指挥官的“快速有效决策”。
1.1 多智能体系统
无人系统与自主智能体的发展深刻重塑了“联合全域指挥控制”(JADC2)框架内的团队结构与角色定位。这些进步重新定义了“指挥控制”(C2)与“任务管理”的实施路径,要求对多元化资源及团队进行精密协同。这种整合需依托先进的“C2能力”以优化资源分配并实时调整任务指令——需综合考量“性能评估”“任务修正”“动态环境条件”“人员工作负荷”“疲劳状态”及“机器性能极限”等多元因素。为应对此挑战,本节将探讨“人机自主编队”(HAT)在多智能体团队中的兴起,以及如何通过“协同设计”的HAT框架评估“有效人类决策权”。
1.1.1 人机自主编队
人工智能与自主系统的应用显著改变了团队动态,催生出“人机自主编队”(HAT)概念[6]。HAT重构了团队结构、成员角色及其在权责体系中的层级关系[6]。将自主智能体融入人类团队增加了复杂度:因其承载差异化能力与角色[7]至[8],可能导致“任务委派矛盾”“权责错配”及“责任主体验证缺失”。由此可能形成影响团队动态与绩效的“复杂依存关系网”[7]至[8]。影响该复杂性的因素包括:成员特性、任务构成、情境特征、环境条件及任务目标。有效评估HAT需建立并验证性能度量标准,涵盖:(i)单兵作战效能(ii)单机性能表现(iii)整体团队绩效[6]。“客观”与“主观”度量工具有助于判定任务能力边界[6]。传统军事团队绩效指标聚焦“安全性”与“作战能力”,包括“团队执行力”“压力水平”“信任度”及“凝聚力”[2]。这些指标可深化团队能力认知,优化“多智能体系统”协作效能以保障任务成功。
1.1.1.1 人机自主编队中的“有效人类决策权”保障
“有效人类决策权”概念包含三大核心原则:仅有人类在场不足以保证实质性控制;意向性决策贡献取决于“心理认知能力”与“系统理解度”;差异化法律责任要求不同层级的控制权,由此可能引发“责任缺失”[9]。核心矛盾源于机器人与装备从工具属性向“团队成员”的转化——这要求建立“相互依存的通信”“协同决策”及“联合作战”机制[10]。因此有效训练方法与“人因工程”研究致力于探索提升“团队效能”与“个体效能”的路径。例如“认知人机系统”研究领域正探索运用“生物标记物”作为人类“精神状态”或“生理状态”的评估指标[11]至[14]。“神经生理学数据”的运用有助于精准解析团队协作中的人类支援需求(如根据“工作负荷”“疲劳状态”或“功率谱密度”动态调整编队层级)[11]至[15]。此类认知将优化“资源配置”,通过AI或“自主智能体”在操作员“失能状态”时提供实质性支援。其还有助于提升“能力透明度”与“依存关系可见性”,发展“可调节的多智能体编队模式”。这些信息可实现“人机资源动态调配”——例如当操作员“警觉度下降”时,自主智能体可增强“贡献度”或接管特定任务“控制权”,从而提升“整体任务效能”。
当前各类“自主能力”已内嵌于无人机系统。这些能力使智能体能够实施“自主决策”,发展“专项技能”以促进任务成功。此类技能通常通过“深度强化学习”(DRL)实现:路径规划(如D3-QN算法)、导航(DQN/PPO算法)及高度控制(DDPG算法)[16]至[18]。既有研究展示了嵌入式自主智能体的应用案例:无人机系统基于“视觉导航”实现“障碍规避”[19],或依托无人机平台实施“目标定位”[20]。此外通过“卷积神经网络”(CNN)与YOLO等算法增强无人机相机的“搜救任务目标检测能力”[20]。多智能体团队还包含其他“半自主系统”:如“陆基/海基水雷”“防空反导系统组件”[22],以及支撑近距空战“基本战术机动”的无人战机“自主导引系统”[23]。但自主载具的“传感器性能局限”(目标检测置信度低、视觉识别偏差或导航执行错误)仍构成制约[24]。过度复杂的智能体模型可能引发“决策透明度”问题,导致团队成员难以维持“态势感知”[25]——例如人类操作员可能无法判断何时介入接管自主智能体任务。
这些能力使多智能体团队得以在人类与自动机器间分配“控制权”与任务。但当人机因“理解偏差”导致协作失败,或“突发异常行为”引发“指挥控制”(C2)系统混乱与模糊性时,将影响多智能体团队的“可预测性”与“作战效能”。美国陆军“训练与条令司令部”(TRADOC)强调必须识别保证任务成功的“部队作战能力”。在战场或灾区等“动态环境”中,当异构团队需与“地面传感器”“无人载具”等资产交互时,须配置“实时学习”与“自适应算法”[2]。这些算法支撑“最优博弈策略”制定,提升部队对“弹道导弹威胁”等动态条件的“响应力”与“适应性”[2]。北约“TG-HFM247工作组”指出人机编队面临“动态可调协作”挑战:因编队过程需“双向认知学习”,双方必须理解彼此“行为模式”“优势”与“短板”。随着团队成熟度提升,这种互相认知将催生“互补增效”作用[26]。该工作组强调采用“人机编队设计模式”可建构“心智模型”、明晰“角色定位”、优化“任务条件”,进而增强“团队协作透明度”与“任务分配策略”[26]。2016年瑞典海军演习中的指挥控制研究提炼出三维度框架:(i)“信息分布”(ii)“决策权分配”(iii)“交互模式”[9],凸显“灵活响应的C2系统”对管理复杂多智能体环境的核心价值。整合“人机编队框架”将提升“协同效能”,通过定义清晰角色与“任务分配策略”,释放混合编队的“互补能力潜能”,最终实现“团队作战效能”的全面增强。
1.1.1.2 协同设计框架
“协同设计框架”评估协调多智能体能力以达成任务目标所需程度。该框架界定各智能体分配的功能与任务能否独立执行,或因“执行能力缺失”必须协作完成[7]至[8]。其运作基于“依存关系”“从属关系”及“执行能力”三原则:“依存关系”定义为联合行动中两个及以上实体为满足依赖需求形成的互补关系[7]至[8];“从属关系”通过“执行能力”概念展开——涵盖实体独立胜任任务所需的技能、知识与认知水平;当实体缺乏有效执行任务的能力时,即形成需他方支援的“从属关系”。为评估任务完成所需的“能力依存状态”,该框架提出采用“依存关系分析表”(IA)[7]至[8]。此表格通过定义任务、子任务、必备能力及团队成员替代角色(执行主体或支援角色),辅助设计依存关系架构。这些能力对任务达成至关重要,指导评估人类操作员与自主智能体间的任务分配。分析结果将强化“决策回路”——该回路作为“联合全域指挥控制”(JADC2)核心要素,遵循“可观察性-可预测性-可导控性”(OPD)准则:“可观察性”确保用户清晰掌握系统内部状态与行动;“可预测性”使用户能基于实时和历史数据预判系统行为;“可导控性”赋予用户引导控制系统运作的权限,确保按需动态调整[7]至[8]。三要素协同作用旨在实现人机智能体间的无缝集成与高效协作。
2.0 研究目标
本文旨在通过聚焦集成自主智能体与人类操作员的混合多智能体团队,应对“联合全域指挥控制”(JADC2)的核心挑战。研究目标分为四方面:(1) 通过AI建议优化资源分配;(2) 建立“多模态数据管道”整合人机智能体与其他实体特征,提升互操作性与同步能力以改进信息融合;(3) 构建“人机自主协同框架”,运用3D仿真环境训练测试多智能体团队,评估性能与依存关系;(4) 应用“可观察性-可预测性-可导控性”(OPD)原则增强JADC2决策流程保障“有效人类决策权”,同时研究人类神经生理信号中的“生物标记物”与“行为模式”以优化资源分配策略。达成这些目标将推动多域作战中基于AI任务分配策略的“多智能体资源管理”进展。
3.0 方法
本方法通过名为JCS的试验性处理平台实现,整合实验设计与海量数据采集构建多模态管道及机器学习算法。该方法运用协同设计原则优化任务分配、资源管理及决策流程,强化“可观察性”“可预测性”与“可导控性”(OPD)。
3.1 联合认知系统(JCS)
所提方案将人机数据整合为统一管道,依托协同设计原则与AI优化任务分配。JCS汇聚多元数据源——含“气象数据”“地理环境地图”(GEM)“任务状态”“神经生理指标”“载具传感器”“信号情报”(SIGNIT)“人工情报”(HUMINT)及“自主智能体性能指标”——形成“多模态集成框架”,增强复杂作战环境中的透明度与动态任务分配能力。
3.1.1 组件与架构
联合认知系统框架含五大模块以提升作战效能:(i)特征采集:获取自主智能体与人类操作员数据;(ii)任务参数:定义子任务(含目标数量与位置);(iii)环境参数:监测风速、降雨、温度等关键条件;(iv)能力评估:核定各智能体能力,确定其担任“支援角色”或“主执行体”;(v)任务分配:运用机器学习技术根据评估能力与环境因素预测最佳子任务执行主体。该综合框架(基于文献[15]改进)旨在优化任务分配、资源管理及整体任务效能。
3.2 实验设计与用例
研究以“搜救任务”(SAR)为用例背景:救援队在时间资源受限条件下部署无人机最优定位灾后受困者。部署“无人机系统”(UAS)的核心目标是评估伤情(区分危重与非危重状态),据此制定救援优先级。任务执行需人类操作员、救援调度员(通常为有人驾驶飞行器)与机器协同完成。无人机必须规避障碍物,规划最优路径定位“目标区域”(即灾区)内所有受困者。任务依据协同设计框架分解,基础能力与子任务如下:S1-目标探测感知;S2-障碍物感知;S3-偏差规避障碍物;S4-抵近目标获取分析图像;S5-在规避禁区的目标区域内导航。该结构化路径确保人机组件协同应对SAR任务需求。

