
今日荐文的作者为中国电子科学研究院专家马征宇,白阳。本篇节选自论文《机器人集群协同作战关键技术研究》,发表于《中国电子科学研究院学报》第17卷第1期。
本文来源:学术plus 微信公众号
摘 要:文中根据机器人集群的概念和特点,结合机器人集群在作战使用中的军事需求,梳理了世界各军事强国在机器人集群领域的发展规划和最新应用研究成果。通过对相关战例的梳理分析,评估了机器人集群在未来作战场景下发挥的主要作用,根据作战需求,综述了机器人集群协同作战的关键技术体系,并对机器人集群在未来作战使用中的发展趋势进行了展望。
**关键词:
**机器人集群;智能;协同
引言
机器人集群一般由异构、可互换的机器人单元组成,利用共识控制法则及有限通信能力产生涌现性的群体行为。在战场上,机器人集群以具有一定感知、自主和行为能力的无人系统为主要作战单元,可与其他兵力协同配合,形成独立建制的作战力量,进化出新的作战模式,生成新的作战能力。
早在20世纪60年代,机器人相关研究已经开始,美国斯坦福研究所于1969年就发布了世界上第一台智能机器人。然而,机器人集群作为一个新兴的研究领域,直到近5年才被研究者关注。 2014年,哈佛大学的科研人员在《Science》上发表的机器人集群论文被评为2014年的十大科学成就之一[1]。其使用足够多低复杂度及低成本的机器人,通过携带红外传感器,实现与相邻机器人的交互,表现出自适应变化外观的群体智能行为。此后,国内外众多学者在机器人集群方面开展了一系列关键技术研究,相关研究成果如图1所示,相关研究内容涵盖机器人集群的自组织行为[2]、路径规划[3]、编队控制[4]、网络通信[5]、信息融合[6]等方面。这些研究标志着机器人集群领域的飞速发展,也促进了机器人集群技术向未来军事应用转化,使机器人集群成为改变未来战争的关键性力量。
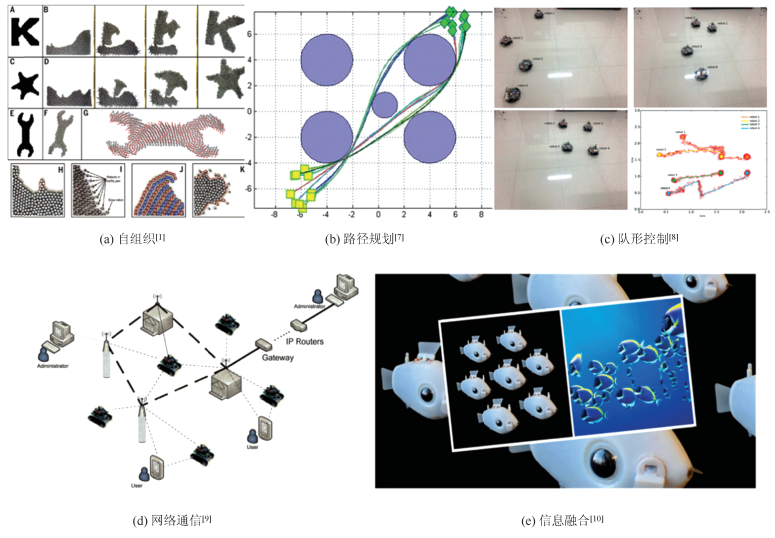
图1 机器人集群关键技术研究代表性成果 1 机器人集群作战特点 随着人工智能、网络信息、增材制造等领域科学技术的飞速发展,战争形态也正从信息化战争向智能化战争加速推进。未来战争与传统战争相比,一方面更注重能力的跨越式提升以拉开非线性优势差距;另一方面随着新理念、新技术、新模态的引入,未来战争将呈现空间多维化、时间实时化、对象多元化、样式丰富化等特点,在机器人集群作战上具体表现为以下四点。 1.1 机器人集群可协同并行作战,加快行动决策速度未来战争中,由于信息技术、网络技术、先进平台技术、精确打击等技术的有力支撑,机器人集群在信息共享水平、机动能力、火力反应能力将大幅度提高,其指挥控制决策速度也大大加快,杀伤链的时间大幅缩短,将显著加快机器人集群的作战节奏。基于这一深刻变革,传统作战理念也受到颠覆,作战群的作战速度将不再受最慢的作战单元制约,而是由最敏捷的单元决定。 1.2 机器人集群可快速模块重组,提高部队恢复能力 在未来消耗作战中,由机器人集群代替有人作战部队,可大幅降低人员伤亡,控制作战损失。模块化构建的机器人单元基于通用接口进行分系统整合,该架构可在满足多任务要求的同时降低成本,支持单体的批量化生产,并在战场消耗中具备快速恢复能力。 1.3 机器人集群可动态调节编成,增强多任务灵活性机器人集群以功能简单、成本较低的单元节点为载体,通过众多异构机器人单元进行灵活编成,利用节点间通信交互进行信息共享,以优化的编组配置进行高效能作战,提高机器人集群的多任务能力。 1.4 机器人集群可智能相互替代,提升体系作战效能体系化作战是未来作战的主要模式,在网络信息体系下,机器人集群的各单元、各编组间相互协同,可实现作战效能倍增。机器人集群通过无中心化协作,在部分节点毁伤失效时,通过智能补位,消除失效点,增强体系鲁棒性,提升体系作战效能。在未来战争需求牵引下,机器人集群依据自身立体化、小型化、无人化、智能化特点,显著加快了作战节奏,提高了作战单元的自主协同水平,形成了基于网络信息体系的联合作战能力。
2 机器人集群军事应用研究现状目前,世界军事强国正在组建机器人协同作战体系,部分机器人集群已开始执行侦察和监视任务,替代士兵站岗放哨、排雷除爆。美国、俄罗斯、以色列等国家正通过顶层规划和项目布局等推进机器人从单元到集群的关键技术和武器装备发展。
2.1 美国 美军在2004年仅有163个地面机器人,2007年增长为5000个,至少10款智能战争机器人在伊拉克和阿富汗“服役”。美军无人系统发展正进入高效提升整个谱系能力、全面推进概念技术融合、逐步推动装备更新拓展的新时期。
2017年3月,美国陆军发布《机器人与自主系统战略》,指出无人作战系统发展的远期目标(2030-2040年)不应局限于单个机器人各自为战,而应实现多个机器人系统的组合作战。2018年3月,美国海军完成《海军部无人系统战略路线图》;2018年8月,美国防部发布第5版无人系统综合路线图《2017-2042财年无人系统综合路线图》,明确指出无人系统的互操作性、自主性、网络安全和人机合作是未来无人系统发展的关键技术。
**美军已经多次将作战机器人应用于实战,比如北美奎尼提克公司研制的“模块化先进武装机器人系统”、福斯特-米勒公司研制的TALON作战机器人、奎奈蒂克公司研制的MAARS地面无人作战平台等。**这些机器人除了可以携带枪械进行正面作战之外,还具备战场救死扶伤以及引爆炸药的功能,兼具火力、救护、排爆的多功能特色,可以有效减少美军士兵的战场伤亡。在近期击毙极端组织头目巴格达迪的作战行动中,美军作战机器人再次成功用于关键时刻爆发的黑夜室内枪战,弥补特种部队夜间射击精准度低的劣势。 2.2 俄罗斯 **近年来,俄军实施大规模武器装备现代化升级计划。**2019年11月22日,俄罗斯总统普京表示,俄军队现代武器装备占比已超过68%,未来这一占比将提升至70%并稳定维持在这一水平。研制能独立完成战场作战任务的机器人,一直是俄军方和研发机构的努力方向。俄罗斯将于2020年开始制订《机器人部队组建任务路线图》,并准备在2025年前完成有关科学研究、试验设计和组建机器人部队等一系列计划,然后将这一新型部队纳入俄军管理体系。 据报道,**俄罗斯目前研制的作战机器人将使用5种自动操作平台,分别执行安保、运输、加油等任务。****俄军方和机器人研发机构今年以来对新研制的作战机器人进行了协同配合演练,取得良好效果。**部分机器人已经被送至叙利亚以接受实战检验,在围攻拉塔基亚省754.5高地的极端势力战斗中,俄罗斯投入了4台履带式“平台”M战斗机器人和2台轮式“阿尔戈”战斗机器人及至少一架无人机。机器人集群的运用使俄叙联军仅仅20分钟就取得了歼灭70名武装分子,己方仅4人受伤的辉煌战果。 2.3 以色列 **以色列在人工智能和机器人领域的技术实力被认为媲美“硅谷”。**凭借强大的科技实力,目前以色列已建成一支纵横海陆空的“机器人军团”,协助执行边境巡逻、情报收集、作战辅助和攻击等多种任务,该军团在以色列国防军的历次作战行动中发挥了重要作用。以色列“机器人军团”的主要机器人装备型号为:UGV守护者无人战车、USV“银色马林鱼”多功能无人水面艇、以及以“苍鹭”以代表的各型无人机等。
此外,以色列还正在加快组建士兵与机器人混成编队的战斗部队,以使机器人战士接到任务后依靠人工智能、大数据分析等技术,自动与人交流并分配工作。 3 机器人集群关键技术体系围绕未来战斗力生成的迫切需求,面向应用场景下的机器人集群效能动态释放,以机器人单元的单体智能技术为基础,以机器人间群体智能技术为关键,以汇聚认知决策能力的体系智能技术为导向,形成开放兼容、蓬勃发展的机器人集群关键技术体系。机器人集群关键技术体系涵盖了决策层的体系技术,连接层的群体技术、以及节点层的单体技术。 3.1 体系智能技术 机器人集群要适应跨域、联合作战等复杂场景,作战要素种类繁多,需要依托感知、认知、决策、控制以及人机融合等先进算法,打造机器人集群体系的效能汇聚能力,驱动作战力量的动态组织,优化战场资源配置,形成机器人集群体系智能技术架构。体系智能技术主要包括分布式作战管理与优化技术、人机协作与融合技术、基于多种学习方法的策略生成技术。
3.1.1 分布式作战管理与优化技术
未来战争的对抗模式强调体系与体系之间的对抗[11],多种异构跨域装备形成的作战体系战斗力直接决定了军队的战斗力强弱[12]。通过分布式协同处理架构[13],使规划控制算法、态势感知及人机交互技术集成于分布式作战管理软件中,将规划与控制分散[14],保证机器人集群的通信和协调稳定性[15],使作战编队在复杂环境下也能够高效执行任务。通过基于多智能体的体系作战效能优化,可迅速寻找到作战能力增长点,有望迅速提升机器人集群作战效能。 3.1.2 人机协作与融合技术
人工智能技术尚不足以支撑其完全取代人完成所有任务[16],因此采用人机协作[17]方式可以发挥人与机器的不同特长,结合人与机器的智能,以做出更有效的战场决策。人机协作与融合技术结合了机器智能可快速、低成本存储、比较、检索、排序的特点与人脑善于联想、推理、分析、归纳的能力特点,实现智能的共同演进和优化。 3.1.3 基于多种学习方法的策略生成技术
决策是机器人集群智能化作战中的关键性步骤,有望成为机器人集群作战能力的倍增器,因此发展高度智能的机器人集群作战策略生成技术迫在眉睫。针对复杂环境中的作战任务要求,建立基于监督学习[18]、无监督学习[19]、增强学习[20]等方法的体系智能协同理论和分布式协同管理框架,探索协同控制策略生成机理[21],提升机器人集群体系在多变战场态势中的作战能力。 3.2 群体智能技术 围绕提升机器人集群分布式模块化跨域协同能力的迫切需求,机器人集群全域协同作战网络关键技术研发要以“万物互联、机器互识、边缘智能、安全可信”为基本方针,提升复杂强对抗环境中链路受限状态下机器人集群不完全信息的态势理解、抗干扰自适应传输、抗毁自组织网络、边缘快速协同决策、语义协同互操作与精确模糊控制能力为重点。群体智能技术体系主要包括大规模抗干扰弹性组网融合技术、协同感知技术、智能任务分配技术等。
****3.2.1 大规模抗干扰弹性组网融合技术
机器人集群的协同首先依赖可靠的大规模、抗干扰组网通信技术[22]。从早期单信道呼叫网到如今的数字移动通信网,研究者一直在寻找稳定高效的抗干扰无线通信系统,尤其是在复杂电磁环境及通信拒止条件下,进行通信频道检测、带宽性能优化、自适应传输、智能故障诊断与修复就显得尤为重要[23]。基于大规模弹性组网[24],机间相对定位[25],综合抗强干扰[26]等技术基础,解决蜂群无人机拒止环境作战中通信保障、网络无法互联互通时节点的间态势共享和协同信息交互、拒止环境下相对定位问题。 ****3.2.2 协同感知技术
战场态势信息的高效可靠获取是突破“电磁迷雾”[27]并取得未来战场制信息权的基础和关键。研究基于多传感器目标跟踪的数据时空对准技术[28]、多传感器数据融合中的数据预处理技术[29]、多传感器数据融合并行处理技术[30]、信号参数随机变化下的分布式检测融合技术[31],开发面向多领域、多功能应用的多传感器信息融合系统。构建机器人集群全维信息感知能力,以确保对战场态势立体实时监控,实现战场环境及态势对我方单向透明,将支持机器人集群有效塑造战场态势。 ****3.2.3 智能任务分配与优化技术
智能任务分配技术考虑集群数量、战场环境、目标价值及单元能力约束等,通过优化将不同任务分配给机器人单元,使机器人集群完成预定的侦察、干扰、攻击任务,提高作战效能的技术。这一问题属于NP难度问题,可通过运筹学进行建模[32],并使用时间序列方法[33]、博弈论方法[34]、遗传算法[35]、粒子群算法[36]、蚁群算法[37]等进行资源分配,再运用整数规划方法[38]、市场竞拍机制算法[24]、自组织算法[39]等进行目标分配。 3.3 单体智能技术 机器人单体功能是通过机器人所搭载的各类感知和执行设备在其核心计算单元控制下完成的。为形成机器人集群的整体作战能力,将从节点机器人模块化可重构技术、智能仿生技术、自主控制技术等为重点进行软硬件技术突破。 ****3.3.1 模块化可重构技术
模块化和可重构的设计理念使得机器人具备了固定形态机器人难以企及的灵活性、易维护性,极大地降低了系统的维护成本[40]。模块化可重构技术包括模块化电器系统建模技术[41]、一体化关节技术[42]、软体序列自重构技术[43]、机器人编程技术[44]、传感器模块化技术、能源管理模块化技术,开发快速设计仿真技术[45]等,通过突破先进机械制造技术,构建覆盖多重作战域的机器人集群装备。 3.3.2 智能仿生技术
仿生技术是通过研究生物系统的结构和性质,为机器人设计提供新原理,并赋予机器人新能力。研究仿人形机器人的感知与控制技术、高性能仿生材料应用技术、视觉仿生探测技术[46]、听觉仿生探测技术[47]、触觉处理技术[58]、复杂环境下多信息获取与融合技术[49],开发接近生物原型的智能仿生机器人本体结构[50],如开发水下机器鱼[51]、壁面爬行机器人[52]、地面机器狗[53]、类人机器人[54]等本体结构。 ****3.3.3 自主控制技术
自主控制技术使机器人能够自主判断战场环境,自主调整和控制单元行为,在通信中断、指控受限的情况下完成任务。为使机器人单元具备自主控制能力,需研究基于计算机视觉的三维地图构建技术[55]、室内定位技术[56]、自主导航技术[57]、目标跟踪技术[58]、机器人及机械手臂自主控制技术[59]、机器人轨迹跟踪控制技术[60],研究复杂环境下机器人的多功能自主控制技术[61]。 4 机器人集群未来发展趋势 4.1 机器人集群将成为主体作战装备,颠覆作战攻防模式 随着人工智能技术的发展,机器人集群及其他群化智能无人装备的数量将会迎来爆发性增长。因为机器人集群装备的智能化水平高、任务灵活性强、机动灵活,其将迅速成为执行战场任务的最佳选择,甚至机器人集群的作战效能将直接影响战争的胜负。由于机器人集群网络化、智能化、无人化的特点,其会加快战斗节奏,模糊前线/后方概念,并依据机器人集群执行命令坚决、低成本可牺牲等特点,形成新的制胜战法。 4.2 机器人集群将成建制形成战斗力,改变军事力量编成 机器人集群可形成扁平化的指挥控制系统,并高效传达、执行既定作战命令,因此机器人集群有望单独组建为特种部队,执行关键性作战任务。机器人集群的兵力配置可根据任务随时调整,可成建制替代现有有人部队,胜任连排级任务清单要求,使作战人员决胜于千里之外。 4.3 机器人集群将进行跨域协同作战,影响军兵种作战体系 机器人集群的单元节点在逐渐复杂化、多栖化,由最初的地面人形机器人、地面无人车、空中无人机、水面无人艇、水下潜航器单打独斗,向跨域联合立体作战发展。机器人集群跨域协同作战可全面提升全域作战能力,这将改变各类军兵种作战分工,通过机器人集群的作战运用促进兵种间的协同配合。 4.4 机器人集群将重塑后勤保障系统,扩大部队的作战范围当前有人部队的作战能力往往受到后勤保障能力制约,例如伊拉克战争中美军第四装甲师的M1A2坦克由于续航里程只有400多千米,只能中途停止突击,等待油料补给,严重制约了装甲部队的纵深打击能力。运用机器人集群担负后勤运输任务,可解放战斗兵力,提高后勤保障效率,以支持未来有人/无人作战部队的远距离、持续作战。 结 语 随着机器人集群领域技术的跨越式发展,机器人集群已经逐步在全域联合作战体系中体现出巨大的应用潜力。世界军事强国纷纷开展机器人集群的协同作战项目,以推进相关技术在未来无人化、智能化战争中的应用,并形成了体系智能、群体智能、单体智能三层的机器人集群关键技术体系。该技术体系的整体突破将促进机器人集群的实战化运用,有望形成一支立体化、特战化、小型化、模块化、智能化的快速反应作战力量。
【参考文献】 [1]RUBENSTEIN M,CORNEJO A, NAGPAL R. Programmable self-assembly in a thousand-robot swarm[J].Science, 2014, 345(6198):795-799. [2]BUDENSKE J, MURRAY L. Decentralized control methods forself-organizing collaborative robotic teams[J]. International Society forOptics and Photonics, 2018, 10651:106510J. [3]LAGOUDAKIS M G, MARKAKISE, KEMPE D. Auction-based multi-robot routing[J]. Robotics: Science and Systems,2005, 5:343-350. [4]BEAL J, CLEVELAND J,USBECK K. Self-stabilizing robot team formation with proto: IEEE self-adaptiveand self-organizing systems 2012 demo entry[C]//IEEE Sixth InternationalConference on Self-Adaptive and Self-Organizing Systems. Lyon: IEEE Press,2012:233-234. [5]LI M, LU K, ZHU H.Robot swarm communication networks: Architectures, protocols andapplications[C]//Third International Conference on Communications andNetworking. Hangzhou: IEEE Press, 2008:162-166. [6]STROUPE A W, MARTINM C, BALCH T. Distributed sensor fusion for object position estimation bymulti-robot systems[C]//IEEE International Conference on Robotics andAutomation. Seoul: IEEE Press, 2001, 2:1092-1098. [7]AYARI A, BOUAMAMA S.A new multiple robot path planning algorithm: dynamic distributed particleswarm optimization[J]. Robotics & Biomimetics, 2017, 4(1):8. [8]WEI H, LV Q, DUO N.Consensus algorithms based multi-robot formation control under noise and timedelay conditions[J]. Applied Sciences, 2019, 9(5): 1004. [9]MING L, LU K, HUA Z.Robot swarm communication networks: architectures, protocols, andapplications[C]//Third International Conference on Communications &Networking. Hangzhou: IEEE Press, 2008: 162-166. [10]BERLINGER F, GAUCIM, NAGPAL R. Implicit coordination for 3D underwater collective behaviors in afish-inspired robot swarm[J]. Science Robotics, 2021, 6(50): . [11]董良东,陈晓,曾兴善. 武器装备体系效能评估方法研究[J]. 兵工自动化, 2008, 27(2):30-31. [12]JOHNSON I R, MACKAY NJ. Lanchester models and the battle of Britain[J]. Naval Research Logistics,2008, 58(3):210-222. [13]王彤,李磊,蒋琪.美国DBM项目推进分布式指挥控制能力发展[J].战术导弹技术, 2019 (1):25-32. [14]AZARM K, SCHMIDT G.Conflict-free motion of multiple mobile robots based on decentralized motion planningand negotiation[C]// Proceedings of International Conference on Robotics andAutomation. Albuquerque: IEEE Press, 1997: 3526-3533. [15]FUCHSEN R. Preparingthe next generation of IMA: A new technology for the scarlettprogram[C]//IEEE/AIAA 28th Digital Avionics Systems Conference. Orlando: IEEEPress, 2009: 5-8. [16]COPELAND B J,PROUDFOOT D. Artificial intelligence: History, foundations, and philosophicalissues[J]. Philosophy of Psychology & Cognitive Science, 2007,77(1):429-482. [17]CHAROENSEANG S, TONGGOEDT. Human-robot collaboration with augmented reality[J]. Communications inComputer & Information Science, 2011:93-97. [18]VOROBYEV G, VARDY A,BANZHAF W. Supervised learning in robotic swarms: from training samples toemergent behavior[M]. Berlin: Springer, 2014:435-448. [19]YUWONO M, SU S W,MOULTON B. Fast unsupervised learning method for rapid estimation of clustercentroids[C]//IEEE Congress on Evolutionary Computation. Brisbane: IEEE Press,2012:1-8. [20]IIMA H, KUROE Y.Swarm reinforcement learning method for a multi-robot formationproblem[C]//IEEE International Conference on Systems, Man, and Cybernetics.Manchester: IEEE Press, 2013: 2298-2303. [21]杭飞. 基于博弈论的多智能体协同控制算法[J]. 电脑与信息技术, 2014, 22(2):14-17. [22]CAO Y U, FUKUNAGA AS, KAHNG A B. Cooperative mobile robotics: Antecedents and directions[J].Autonomous Robots, 1997, 4(1): 7 27. [23]TSENG Y C, NI S Y,SHIH E Y. Adaptive approaches to relieving broadcast storms in a wirelessmultihop mobile Ad Hoc network[J]. IEEE Transactions on Computers, 2003, 52(5):545-557. [24]CHENG Q, YIN D, YANGJ. An auction-based multiple constraints task allocation algorithm formulti-UAV system[C]//2016 International Conference on Cybernetics, Robotics andControl (CRC). Hong Kong: IEEE Press, 2016: 1-5. [25]WANG L, DAI J, CHENGQ. Cooperative control of robotic swarm based on self-organized method andhuman swarm interaction[C]// 2018 WRC Symposium on Advanced Robotics andAutomation. [S.l.]: IEEE Press, 2018: 129-134. [26]施淼淼. 面向IDGPS机器人集群通信链路故障检测与恢复[D]. 南京:南京理工大学, 2009. [27]廖方圆,周华吉,李京华,等.无人机群通信网络态势感知研究现状与发展趋势[J].航空兵器, 2019, 26(4):16-22. [28]张娟,徐德,张正涛,等.基于多路显微视觉的微零件自动对准策略[J].机器人,2014,36(1):69-75. [29]雷旭升,白浪,洪晔,等.基于自适应遗传算法的小型无人旋翼机系统辨识方法[J].机器人,2011,33(5):528-532. [30]沈悦明,陈启军.一种基于任务的机器人全局并行算法研究及实现[J].机器人,2003,25(6):495-500. [31]王文.面向机器人跟随作业的目标人跟踪[D]. 杭州:浙江大学,2018. [32]BRIAN P G, MAJA J M.A framework for studying multi-robot task allocation[C]//In Multi-RobotSystems: From Swarms to Intelligent Automata Conference. Los Angles: KluwerAcademic, 2003:15-26. [33]MEI Z, PENG Z, ZHANGX. Optimal dynamic weapon-target assignment based on receding horizon controlheuristic[C]//13th IEEE International Conference on Control & Automation.Ohrid: IEEE Press, 2017: 876-881. [34]BARDHAN R, BERA T,SUNDARAM S. A decentralized game theoretic approach for team formation and taskassignment by autonomous unmanned aerial vehicles[C]//2017 InternationalConference on Unmanned Aircraft Systems. Miami: IEEE Press, 2017: 432-437. [35]JIA Z, YU J, AI X.Cooperative multiple task assignment problem with stochastic velocities andtime windows for heterogeneous unmanned aerial vehicles using a Geneticalgorithm[J]. Aerospace Science and Technology, 2018, 76: 112-125. [36]ZHOU D, LI X, PAN Q.Multiobjective weapon-target assignment problem by two-stage evolutionarymulti-objective particle swarm optimization[C]//IEEE International Conferenceon Information and Automation. IEEE Press, 2016: 921-926. [37]LI Y, KOU Y, LI Z. Amodified pareto ant colony optimization approach to solve biobjectiveweapon-target assignment problem[J]. International Journal of Aerospace Engineering,2017:1746124. [38]RADMANESH M, KUMARM. Flight formation of UAVs in presence of moving obstacles using fast-dynamicmixed integer linear programming[J]. Aerospace Science and Technology, 2016,50: 149-160. [39]WANG L, DAI J, CHENGQ. Cooperative control of robotic swarm based on self-organized method andhuman swarm interaction[C]//WRC Symposium on Advanced Robotics and Automation.IEEE Press, 2018: 129-134. [40]DAI J S, ZOPPI M,KONG X. Advances in Reconfigurable Mechanisms and Robots I[M]. London: Springer,2012. [41]BORDIGNON M, SCHULTZU P, STOY K. Model-Based Kinematics Generation for Modular MechatronicToolkits[J]. ACM SIGPLAN Notices, 2010, 46(2): 157-166. [42]BOUMANS R, HEEMSKERKC. The European Robotic Arm for the International Space Station[J]. Roboticsand Autonomous Systems, 1998, 23(1): 17-27. [43]刘佳鹏,王江北,丁烨,等. 晶格型模块化软体机器人自重构序列[J]. 上海交通大学学报,2021,55(2):111-116. [44]DE ROSA M, GOLDSTEINS C, LEE P. Programming modular robots with locally distributedpredicates[C]//International Conference on Robotics and Automation, 2008:3156-3162. [45]温宽昌.基于ROS的码垛机器人运动仿真及轨迹规划[D]. 哈尔滨:哈尔滨工业大学,2016. [46]王国彪,陈殿生,陈科位,等.仿生机器人研究现状与发展趋势[J].机械工程学报,2015,51(13):27-44. [47]KUNTZMAN M L,MICHAEL L, HALL N A. Sound source localization inspired by the ears of theormiaochracea[J]. Applied Physics Letters, 2014,105(3): 1-5. [48]HANNAFORD B, OKAMURAA M. Haptics[M]. Handbook of Robotics. Cham: Springer, 2016: 1063-1084. [49]王斐, 齐欢, 周星群,等. 基于多源信息融合的协作机器人演示编程及优化方法[J]. 机器人, 2018, 40(4): 551-559. [50]SCHILLING N,CARRIER D R.Function of theepaxial muscles in walking,trotting and galloping dogs: Implicationsfor the Evolution of Epaxial Muscle Function In Tetrapods[J]. Journal ofExperimental Biology, 2010, 213(9):490-502. [51]李宗刚,马伟俊,葛立明,等.一种2自由度胸鳍推进仿生箱鲀机器鱼转弯特性研究[J].机器人,2016,38(5):593-602. [52]毛晨曦,沈煜年. 爪刺式飞行爬壁机器人的仿生机理与系统设计[J]. 机器人,2021,43(2):246-256. [53]刘冬琛,王军政,汪首坤,等.一种基于并联6自由度结构的电动轮足机器人[J].机器人,2019, 41(1):65-74. [54]龚道雄,何睿,于建均,等.一种气动肌肉拮抗驱动机器人关节的类人运动控制方法[J].机器人,2019,41(6):803-812. [55]胡美玉,张云洲,秦操,等.基于深度卷积神经网络的语义地图构建[J].机器人,2019,41(4):452-463. [56]高云峰,周伦,吕明睿,等.自主移动机器人室内定位方法研究综述[J].传感器与微系统,2013,32(12):1-5. [57]孔令文,李鹏永,杜巧玲.基于模糊神经网络的六足机器人自主导航闭环控制系统设计[J].机器人,2018(1):16-23. [58]苏贇,王挺,姚辰,等.基于合作目标的无人机目标跟踪方法[J].机器人,2019(4):3. [59]王明,黄攀峰,常海涛,等.基于机械臂耦合力矩评估的组合航天器姿态协调控制[J].机器人,2015,37(1):25-34. [60]邹强,丛明,刘冬,等.基于生物认知的移动机器人路径规划方法[J].机器人,2018,40(6):894-902. [61]陈卫东,董胜龙,席裕庚.基于开放式多智能体结构的分布式自主机器人系统[J].机器人,2001,23(1):45-50. (全文完)
