
军事人员经常在严格的时间限制下操作,要求操作员做出快速而准确的决策。海军陆战队员与水面舰艇操作员常依赖平视显示器(HUD)来导航密集雷区并识别诸如水雷、浮标及其他地标等目标。增强现实(AR)技术可通过叠加GPS位置和目标跟踪等信息显著增强平视显示器的功能。本文展示了证明AR海上导航功能(包括迷你地图和凝视引导线)有效性与可用性的初步结果。受试者需完成三次试验,在模拟环境中驾驶一艘海军小艇穿过雷区抵达海岸,期间分别可使用迷你地图和凝视引导线、仅使用迷你地图、或两者均不使用(对照组)。每次试验都包含预定义的安全航道,当用户靠近航道中心时航道保持绿色,接近边缘时变为黄色,驶出航道时变为红色。通过分析驾驶表现和反应时间来正确识别五个不同颜色的目标。结果显示,在使用迷你地图和凝视引导线的情况下,航道保持绿色的时间为97.2%,仅使用迷你地图时为93.4%,而对照组为78.0%。使用迷你地图和凝视引导线正确识别目标的平均时间为1.50秒(标准差 = 0.72),仅使用迷你地图时为2.29秒(标准差 = 1.26),对照组为2.57秒(标准差 = 1.68)。当受试者能使用迷你地图和凝视引导线时,正确目标识别率提高了50.8%,仅能使用迷你地图时提高了37.8%。这些发现表明,这些AR功能可以增强战场环境下的决策能力。
海军陆战队员与水面舰艇操作员经常需要在压力环境下快速做出战场决策。海上导航仪器已从罗盘和六分仪等基本工具发展到GPS系统和海图仪等更先进的技术。随着技术进步,增强现实(AR)成为下一项革新,它能将真实世界的视觉数据与地理定位的合成视图融合,并叠加在平视显示器(HUD)上。AR可以通过允许用户在保持对物理环境感知的同时可视化导航数据,从而提高态势感知能力(Nordby等人,2024)。对船长至关重要的信息包括速度和航向、当前GPS坐标、水雷或其他目标的检测与跟踪、到最近感兴趣地标的距离、期望的导航路径以及到海床的距离。设计AR导航系统最关键的挑战在于仅在平视显示器上呈现最关键的信息,避免因信息过载而对用户体验产生负面影响。在认识到信息过载挑战的同时,有必要精简所显示的信息,以促进操作员决策能力的整体提升(Laera等人,2021)。
海上场景中两个最关键的指标包括导航性能和目标识别。海军陆战队员与水面舰艇操作员必须遵循预定航线,以避免偏离进入不安全区域(Okazaki等人,2017)。在密集雷区中,机动必须快速而准确。关于船只位置、航向和速度的实时反馈有助于减少偏差并促进任务整体成功。影响导航性能的因素包括导航仪器的可靠性、仪器提供的信息和数据,以及用户处理信息并有效做出适当决策的能力。
此外,目标识别最关键的方面是性能和效率。在海上场景中,船长必须区分水雷、浮标和地标等物体,目标识别的效率直接影响任务的安全与成功。需要快速的认知处理和即时决策,以确保及时进行航向修正或规避机动。
本研究旨在测量两种AR导航功能对导航性能和目标识别的影响。这些功能在HoloWarrior: SAIPAN(单兵两栖集成精确增强现实导航系统)中可用,包括迷你地图和凝视引导线。迷你地图是用户物理环境的浓缩和简化表示。它通常呈圆形或椭圆形以模拟自然视野范围,并包含当前位置、预定路径、附近地标和感兴趣目标等信息。迷你地图在平视显示器上的位置在AR导航系统中并无统一标准,但通常置于底部中央或右上/左下角。迷你地图的目的是通过使用户能更方便地可视化其周围环境和安全路径来改善导航。
凝视引导线(GGL)的评估是本研究的第二个主要评价内容。凝视引导线是将迷你地图上对应于感兴趣目标的标记与其在物理环境中的位置连接起来的线条。其益处的心理学基础源于邻近兼容性原则,该原则断言,两个需要在心理上关联或比较的对象(例如,确认场景中的物体与迷你地图上的物体具有同一性)也应在感知视图中被“链接”起来(Wickens & Carswell, 1995)。凝视引导线足够细,不会遮挡环境视图,但能帮助用户快速准确地识别环境中相对于其在迷你地图上位置的物体。先前研究表明,凝视引导线能改善近距离空中支援中的响应时间和准确性(Mifsud等人,2022),因此下一步是证明其在海上环境中的有效性。图1显示了海岸线上的油桶,这是目标通过凝视引导线在迷你地图上连接的示例。迷你地图在目标识别中至关重要(Warden等人,2022)。因此,结合使用这些AR功能应能显著提高导航性能、目标识别准确性,并减少反应时间和航行距离。
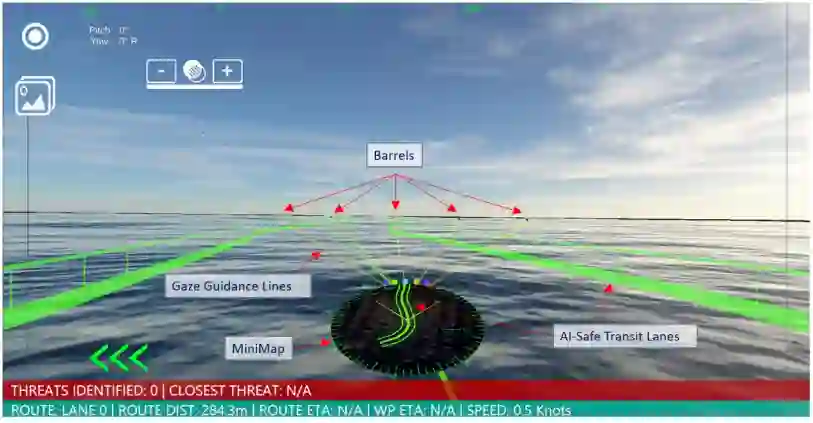
图1. 迷你地图和凝视引导线协同工作,帮助用户正确识别远处的物体。凝视引导线从迷你地图上的油桶标记延伸至其在环境中的相应位置。

