
当前用于自动规划的战斗模拟软件开发在其方法中没有考虑到战争迷雾。这使得他们的输出不太现实,因为在现实世界的规划中不可能有精确的敌人位置。人工智能控制的部队应该能够在没有信息的情况下运作,而这些信息在相同的情况下是人类无法获得的。本文提出了一种AI智能体在给定典型情报的情况下预测和评估敌方兵力位置的方法。我们还提出了一种方法来汇总这些位置的风险影响。我们在一个战斗模拟环境中展示了这些技术,并评估了它们在多个战斗场景中的表现。结果显示了战斗模拟中不确定性的重要性,并说明我们的风险汇总方法是有效的。
在将人工智能(AI)技术与作战模拟相结合时,重要的是要将战争迷雾的考虑因素包括在内并加以考虑。目前的自动规划方法依赖于对敌方部队位置的完美了解,使得人工智能控制的智能体行动不太现实。为了使智能体的行为更加自然,人工智能兵力应该接受与人类指挥官在类似情况下可用的相同类型和数量的信息并采取行动。这将要求人工智能依赖对其对手和环境条件的理解,就像人类一样。
这篇论文着重讨论了人工智能在模拟环境中处理战争迷雾的能力的两个方面。第一个方面是人类对提交给人工智能的关于敌人和环境的知识的表述。这包括敌人的优先级和程序,以及环境因素,如能见度和视线。第二方面是当给定这些知识时,人工智能可以预测战雾中可能的敌人位置,并评估可能的敌人编队的风险影响。
关于第一个方面,我们审查了人工智能在模拟环境中跟踪对手和战术注释的方法。我们发现有必要将战斗地形离散为一个导航图。这个导航图将有支持实体运动的边和可以被注释的节点,为人工智能代理提供战略信息。我们还确定了在战斗模拟环境中对单位几何的战术评估技术。
然后,我们发现适用于检查军事决策过程(MDMP)中进行的分析,特别是由战斗空间情报准备(IPB)产生的产品。IPB的输出包括将已知的对手战术分层到当前的作战环境中,以产生一个预期的敌人行动路线(ECOA),如图1所示的态势模板。
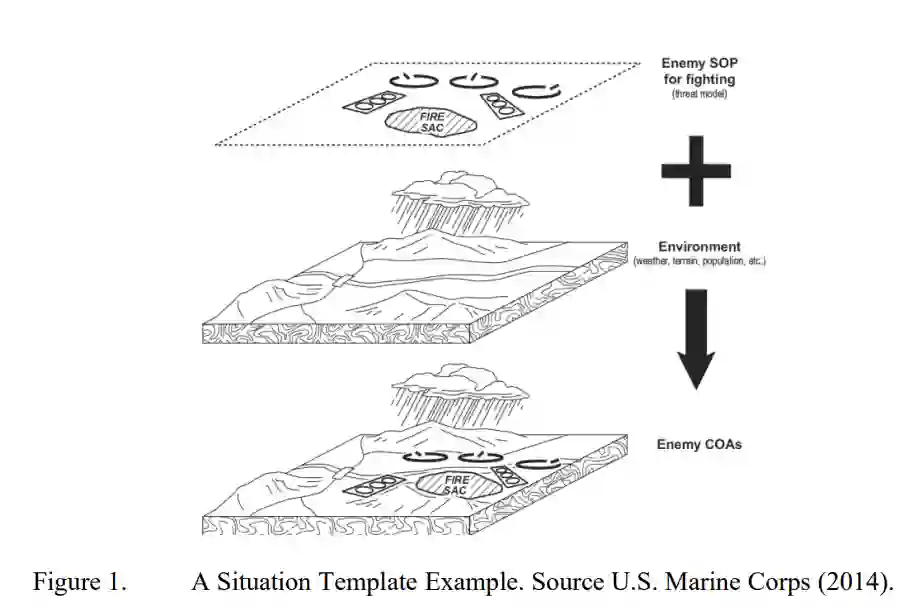
节点的战术注释可以看作是图1中所示的顶层敌人威胁模型。当这些注释被应用于地形的导航图(环境层)时,其结果是将ECOA编码到模拟中。然后,我们可以评估潜在的敌人位置与编码的ECOA有多大的一致性。
我们把这种评估称为编队评分函数。这个评分函数是让人工智能预测和评估战争迷雾中风险的起点。该函数产生一个数字分数,它取决于一个给定的敌方编队在保持理想的单位几何形状和火力掩护的同时瞄准目标优先事项的能力。分数越高,表明越符合编码的ECOA的要求。我们把一个能使给定评分函数最大化的编队称为预测。
不幸的是,识别一个最大化的编队并不是一项微不足道的任务,因为它涉及到多个实体平衡几个竞争性因素以产生一个分数。我们采用的方法是将未被发现的实体随机放置在地形上的可能位置,让它们爬到对阵型得分贡献最大化的位置。通过几轮的随机放置和爬坡,产生了候选阵型集,每个阵型都是评分函数的局部最大值。每个编队由一组不同的敌人实体位置和导航图中节点的相关威胁值组成。
然后,我们使用吉布的典型集合方程,将候选集合中的每个编队视为实际敌方编队可能处于的一种 "状态"。这使我们能够为候选集合中的每个编队计算出一个概率值。然后,我们可以根据每个编队的计算概率来汇总其节点威胁值。这使我们能够将可能的敌方阵地的估计风险表示为一个单独的图,我们称之为不确定性威胁图。由于该图仅由现有的情报产品和观察结果产生,它不依赖于人类指挥官无法获得的无关信息。
本论文介绍了我们在WOMBAT XXI(WXXI)中对这些方法的实施和评估,WXXI是一个用Unity 3D游戏引擎构建的轻型战斗模拟环境(图2)。
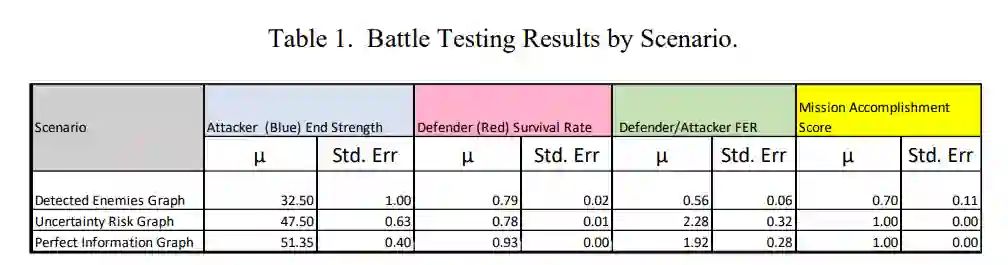
使用WXXI的单位模板和真实世界的地形表现,我们进行了60次模拟战斗,跨越三个不同层次的敌军阵地信息。这些战斗模拟了攻击一个蓝军排,对抗一个静态的红军小队。在第一种情况下,我们将蓝方的知识限制在一组探测到的红方防御者。在第二种情况下,我们使用检测到的红色防御者和一个阵型评分函数来产生一个不确定性威胁图,以估计实际的红色阵型。在最后一个场景中,蓝色被赋予了关于红色阵地的全部信息。在每场战斗中,我们都收集了关于蓝方和红方的伤亡、零散交换率(FER)和任务完成情况的数据。我们发现,当蓝方得到红方阵地的估计时,他们的表现与得到实际阵地时相当。表1提供了在三个战斗场景中收集到的定量数据。
论文中预测和不确定性建模的新方法在自动计划和改善兵棋推演中人工智能控制的兵力方面有很大的应用潜力。论文还提供了运动到交战行动的进一步测试实例,并提供了一种使用编队评分功能的计划识别方法。最后,我们为WXXI作战模拟环境贡献了附加功能。
