

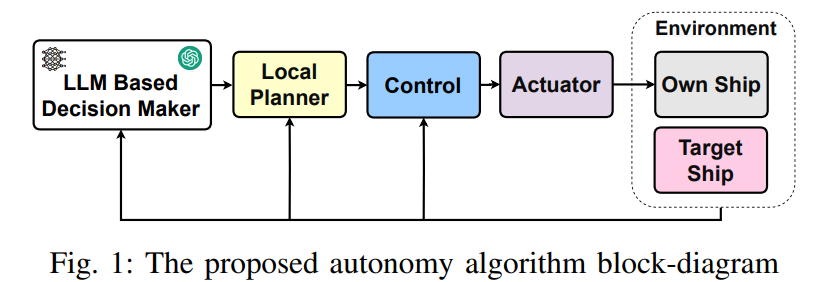
在自动水面航行器(ASV)领域,针对主要为人类操作员制定的海上 COLREG(碰撞规则)设计决策和避障解决方案一直是一项紧迫的挑战。可解释的人工智能(AI)和机器学习的最新进展表明,有望实现类似人类的决策。值得注意的是,大型语言模型(LLM)在自动驾驶汽车等复杂系统决策中的应用取得了重大进展。然而,COLREGs(从算法的角度来看)的文本和有些模糊的性质所带来的挑战与 LLMs 的能力不谋而合,这表明 LLMs 可能很快就会越来越适用于这一应用。本文介绍并演示了基于 LLM 的 ASV 决策和控制的首次应用。所提出的方法建立了一个高级决策制定器,它使用在线碰撞风险指数和关键测量值来做出安全操纵的决策。开发了一种量身定制的设计和运行时结构,以支持在逼真的 ASV 模型上进行训练和实时行动生成。集成了本地规划和控制算法,以便在较低水平上执行航点跟踪和避免碰撞的指令。据作者所知,这项研究是首次尝试将可解释人工智能应用于识别 COLREGs 规则的海事系统动态控制问题,为这一具有挑战性的领域开辟了新的研究途径。在多个测试场景中获得的结果表明,该系统有能力保持在线 COLREGs 合规性、准确的航点跟踪和可行的控制,同时为每个决策提供人类可解释的推理。
成为VIP会员查看完整内容
相关内容

Arxiv
223+阅读 · 2023年4月7日
Arxiv
89+阅读 · 2021年10月21日

相关VIP内容
相关资讯
相关论文
Arxiv
223+阅读 · 2023年4月7日
Arxiv
89+阅读 · 2021年10月21日