
全源传感器的自主和弹性管理(ARMAS)框架在独特的过滤器(称为子过滤器)的传感器排除库中监测残余空间测试统计数据,以提供一个有保障的弹性、抗故障的全源导航架构。本文所展示的这个架构的一个关键假设是所有子滤波器之间的状态观测完全重叠。全源传感器,特别是那些只提供部分状态信息的传感器(高度计、TDoA、AOB等),本质上不符合这一要求。本文提出了一种监测实时重叠位置状态可观察性的新方法,并在ARMAS框架内引入了一个可观察性库,称为稳定可观察性监测(SOM)。 我们将保持一致的全源FDE以恢复故障传感器的能力定义为导航弹性。有弹性的FDE能力是指它能意识到何时需要更多的传感器信息来保护FDE的一致性和完整性功能不被破坏。SOM是作者所知道的第一个展示这种全源传感器的系统。创建了一个模拟GNSS和位置及速度替代性导航传感器的多代理3D环境,并利用单个GNSS伪距传感器的异常情况来展示该新型算法的能力。本文展示了SOM在ARMAS框架内的无缝集成,提供了及时的提示,以增加来自其他代理的新传感器信息,并指出框架的稳定性和保护所有来源的导航完整性何时实现。
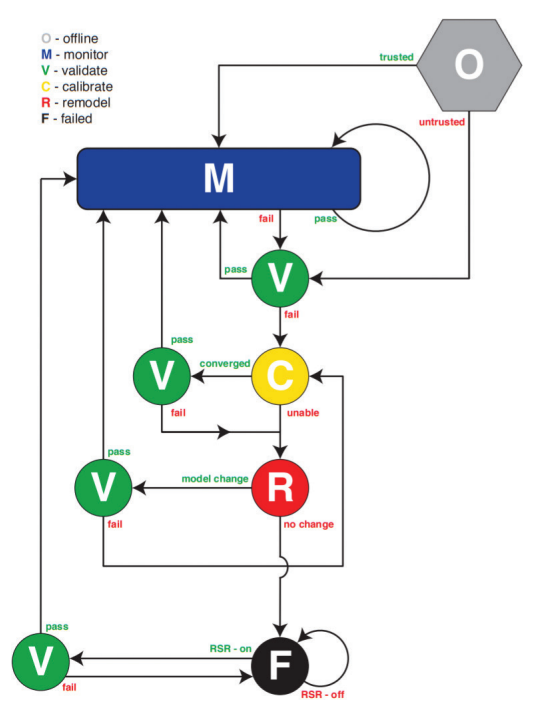
图 1 ARMAS 框架状态图(Jurado & Raquet,2019):传感器从 O 点(原点)开始,可以信任或不信任。 SAARM 和新贡献的 SOM 位于监控 (M) 模式中。
成为VIP会员查看完整内容
相关内容


相关VIP内容
相关资讯