
众多系统需在分布式智能体间分配任务,并要求各参与者优化有限资源以高效完成任务。在智能体数量少、环境稳定的场景中,存在搜索最优任务与资源分配的算法。此类系统可通过集中式策略规划与智能体协调实现优化。但在智能体数量庞大或环境高度动态、不确定的复杂场景中,传统方案效能下降。现实系统(如无线传感器网络、智慧城市车辆协同、无人机集群编队)往往兼具复杂性与环境扰动敏感性。本论文针对动态多智能体系统的任务与资源分配挑战做出贡献,开发可扩展的去中心化算法——基于智能体局部知识优化任务与资源分配,提升系统在真实场景中的效用。我们通过三项递进式创新解决该问题:首先开发基于强化学习的任务分配算法(根据任务完成质量优化分配,并基于历史绩效动态调整探索策略);其次提出资源分配算法(通过强化学习评估任务价值,优化有限资源在受托任务中的配置);最终整合前两项成果形成动态环境下的综合解决方案,并增强其对通信中断、恶劣天气等扰动的鲁棒性。通过代表性系统仿真验证各模块性能,并以海洋环境监测系统为案例评估整体方案。
为实现研究目标,我们分步研究并整合解决方案:
贡献1:任务分配算法
提出四类协同算法,使智能体通过强化学习优化任务分配策略,并根据经验动态调整系统探索程度。算法支持智能体评估他者任务执行能力、分配任务,并基于当前认知与能力探索需求采取行动。
贡献2:资源分配算法
引入结合时间维度资源需求函数近似与强化学习的资源优化算法,适用于共享资源竞争与任务优先级排序场景。
贡献3:层次化多目标任务与资源分配综合算法
开发整合前两项贡献的算法,适应动态系统中智能体构成与能力变化,解决多竞争目标优化难题,并支持智能体自组织角色分工。
三项贡献共同应对1.3节所述挑战,达成1.2节定义的研究目标。
论文结构
第一部分:概述多智能体系统相关概念、理论与既有成果。
第二部分:详述核心研究内容、算法设计及海洋监测案例评估。
第三部分:总结成果、展望未来研究方向与应用潜力。
章节安排
• 第2章:解析多智能体系统核心概念、运作环境与分布式系统应用。
• 第3-5章:分别探讨任务分配难题(第3章)、有限资源优先级分配(第4章)、多智能体强化学习应用及现实挑战(第5章)。
• 第6章:剖析分布式智能体系统组织结构、特征与自组织行为。
• 第7章:以无线传感器网络(特别是海洋监测案例)贯穿概念阐释。
• 第8章:形式化定义智能体系统,确立任务与资源分配问题框架。
• 第9章:聚焦任务分配算法开发。
• 第10章:设计任务优先级驱动的资源分配算法。
• 第11章:整合任务与资源分配方案,实现1.2节全局问题求解,并增强智能体间协同自组织能力。
• 第12章:基于海洋环境传感器网络的案例研究(恶劣动态环境中验证算法可靠性)。
• 第13章:总结研究成果与目标达成度,探讨应用场景及未来扩展方向。
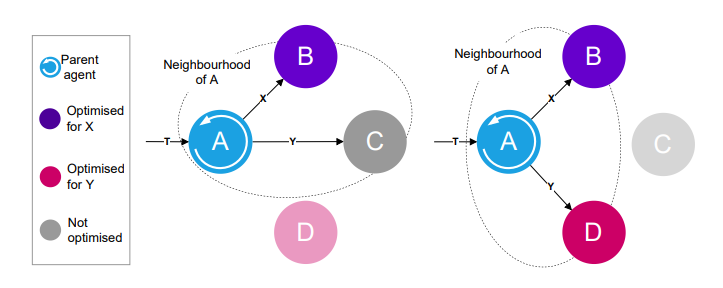
图1.3:智能体系统中的任务分配。智能体𝐴持续接收类型𝑇的任务集(需执行类型𝑋与𝑌的子任务)。首幅图示中,其将𝑋类任务分配给最优智能体𝐵,但将𝑌类任务分配给非最优智能体𝐶。次幅图示显示𝐴通过学习确认𝐷为𝑌类任务最优执行者,遂调整邻居关系(剔除𝐶并纳入𝐷)。
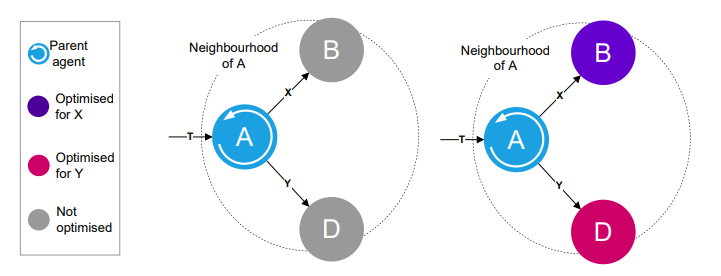
图1.4:多智能体系统中的行动优化。两图展示智能体学习优化行动以响应任务请求的进程。首幅图中,𝐴将𝑋类子任务分配给𝐵、𝑌类分配给𝐷,但𝐵与𝐷均未优化资源配置以优先处理对应任务。次幅图中,𝐵与𝐷通过资源重配置分别优化执行𝑋与𝑌类任务的价值(针对𝐴的需求)。
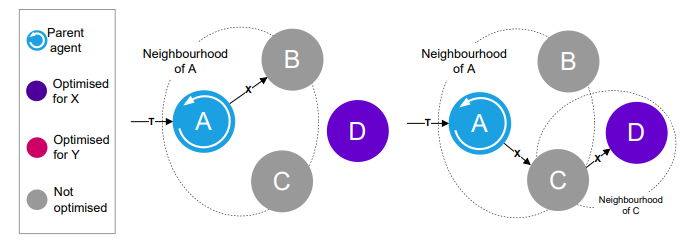
图1.5:多智能体系统中的邻居关系。首幅图中,𝐴将𝑋类任务分配给未优化的𝐵,而专精𝑋类任务的𝐷虽存在却不在𝐴的邻居范围内。处于𝐴邻居范围的𝐶虽无法直接执行𝑋类任务,但可连接至𝐷。次幅图示显示𝐶通过学习承担任务中继角色,使𝐴间接扩展邻居范围至𝐷,实现𝑋类任务的最优执行。

