无人机面临的核心挑战在于路径规划与动态避障。近年来涌现的多种路径规划算法虽成功解决部分问题,但仍存在诸多局限。本文针对A*、RRT与粒子群优化(PSO)三种主流算法,在障碍物密集的三维城市环境中开展系统性实验。通过设计三组实验(每组含两种场景),综合考量城市地图规模、飞行高度、障碍物密度与尺寸等变量。实验结果表明:A算法在计算效率与路径质量方面表现最优;PSO在急转弯与高密度环境展现优势;RRT*凭借随机搜索特性,在各类实验中保持均衡性能。
形态各异的无人机已广泛应用于军事[2]、航拍、搜救[3]与农业[1]等领域。路径规划作为实现地形导航、任务执行与目标抵达的核心技术,近年来成为研究重点。路径规划可分为两大范式:静态环境规划与动态环境规划。前者适用于障碍物位置固定的场景(如建筑物、桥梁、交通灯),需在任务前完成路径计算;后者应对移动障碍物(如车辆、鸟类、行人),依赖机载实时路径计算模块实现动态适应。算法选择取决于具体任务需求。
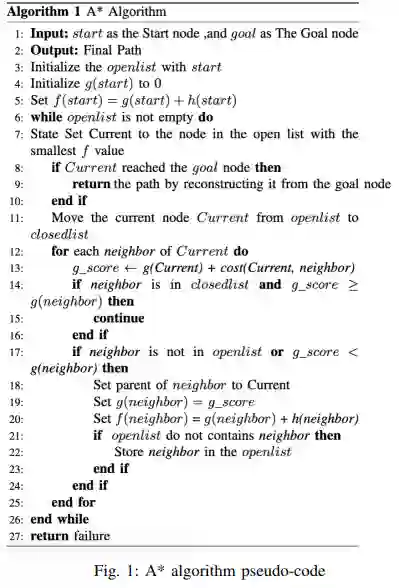
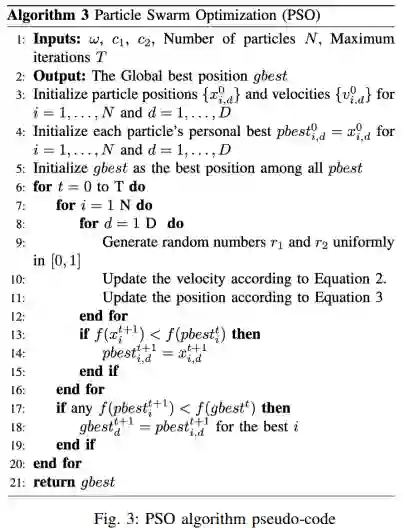
路径规划算法主要分为四类:第一类为基于图搜索的算法(如A*[5]、Dijkstra[4]、D*[6]、跳点搜索JPS[7]),将环境建模为图结构,节点代表位置/状态,边代表可行转移路径。第二类为基于采样的方法,包括概率路线图PRM[8]与快速扩展随机树RRT[9],通过随机采样构建路径。第三类为人工势场法[10],通过引力与斥力场引导无人机趋近目标。第四类为仿生优化算法(如蚁群ACO[11]、粒子群PSO[12]、灰狼GWO[13]),模拟生物行为并依赖预设成本函数寻优。各类方法虽具优势,但均存在局限:图搜索法在三维大场景中计算成本高[14];仿生算法需参数调优且迭代次数多[15];势场法易陷局部最优[16];采样法则生成离散航点而非连续轨迹[17]。本文聚焦RRT*[18]、A*与PSO三种经典算法,针对城市三维环境设计六种实验场景(涵盖环境规模、障碍物形态密度、起降高度差异等变量),系统比较其性能差异。
论文结构如下:第二节综述相关对比研究;第三节概述A*、RRT*与PSO算法原理;第五节详述仿真实验与结果分析;第六节总结研究结论。