
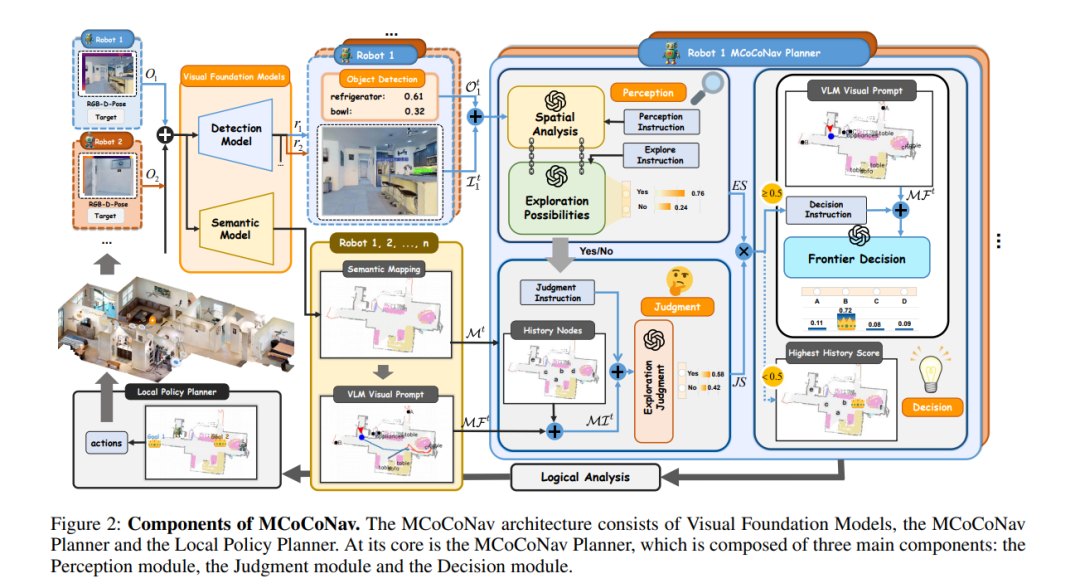
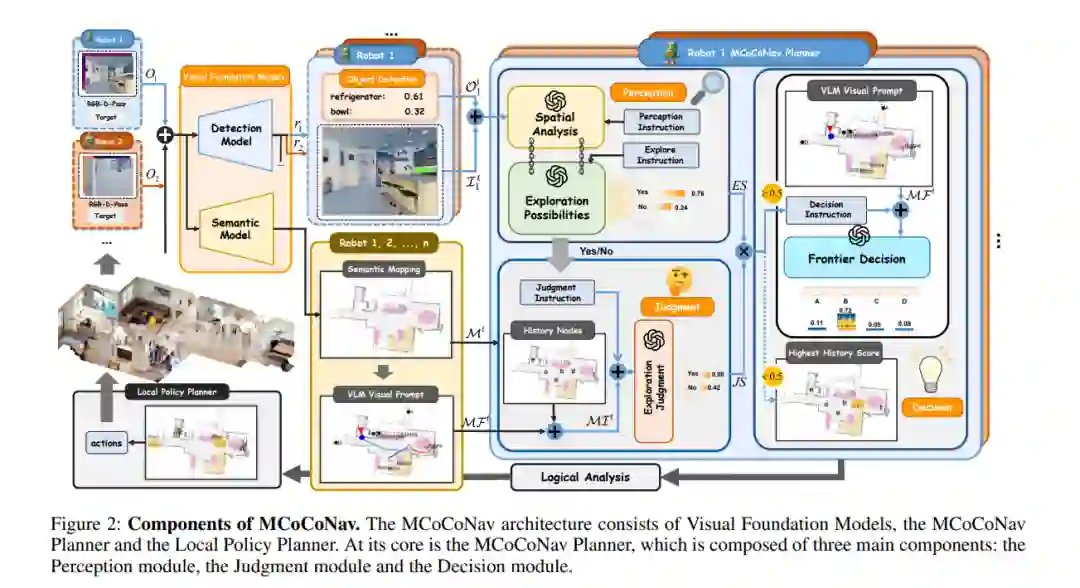
了解人类如何协作地利用语义知识探索未知环境并决定导航方向,对于家务服务多机器人系统至关重要。以往的方法主要集中在单机器人集中式规划策略上,这极大地限制了探索效率。近年来的研究考虑了多机器人分散式规划策略,为每个机器人分配独立的规划模型,但这些方法往往忽视了通信成本。在本研究中,我们提出了多模态思维链协同导航(MCoCoNav),这是一种模块化方法,利用多模态思维链来规划多机器人的协作语义导航。MCoCoNav将视觉感知与视觉语言模型(VLMs)相结合,通过概率评分评估探索价值,从而减少时间成本并实现稳定输出。此外,使用全球语义地图作为通信桥梁,最小化通信开销,同时整合观察结果。在反映探索趋势的得分指导下,机器人利用该地图评估是否探索新的前沿点或重新访问历史节点。我们在HM3D v0.2和MP3D上的实验验证了我们方法的有效性。我们的代码可以在https://github.com/FrankZxShen/MCoCoNav.git获取。
成为VIP会员查看完整内容
相关内容
Arxiv
224+阅读 · 2023年4月7日

相关VIP内容
相关资讯
相关论文
Arxiv
224+阅读 · 2023年4月7日