
摘要
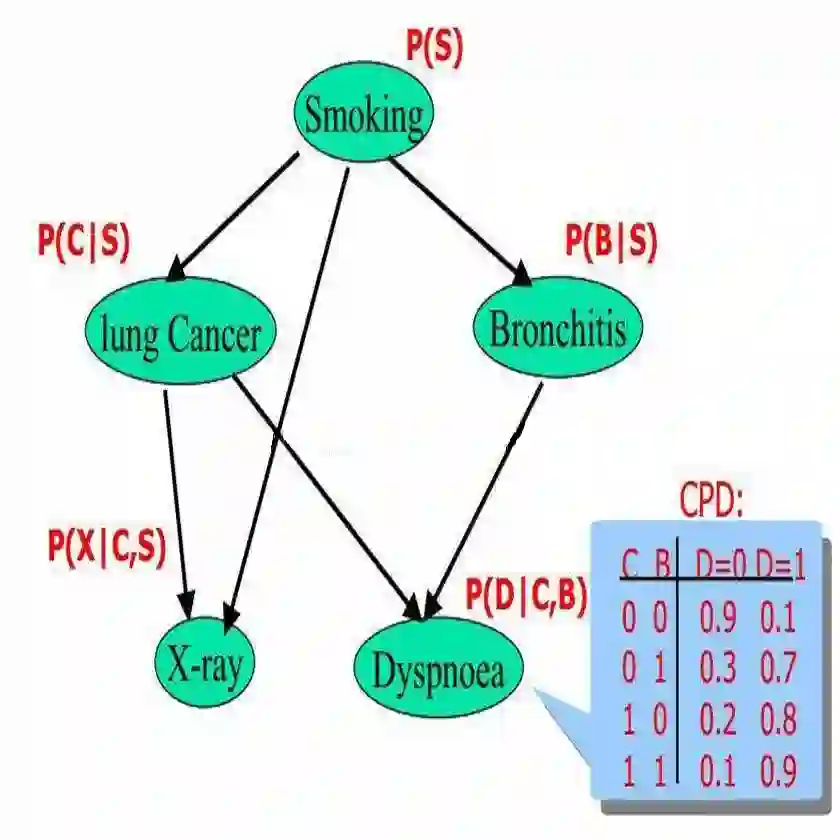
信息共享一直对军事行动至关重要。本文考虑了应包含哪些解释性内容以促进更好的决策。探讨了元不确定性的概念,这是在没有解释性内容的情况下产生的。论文使用两个场景来探讨省略解释的后果。在场景中,贝叶斯网络用于在不确定性下对推理进行建模。这些情景表明,元不确定性会对决策产生负面影响。提出了一种应对元不确定性的方法,即对共享信息的可能解释进行概率建模。
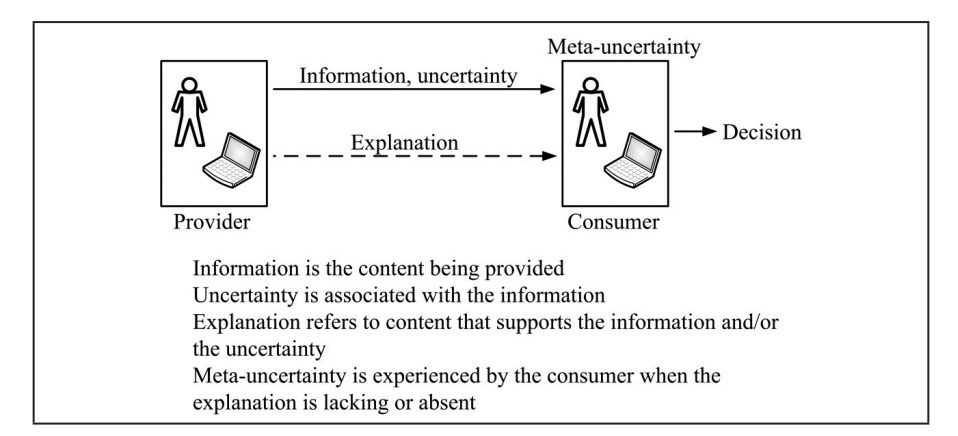
图1:军事环境中的信息共享典型场景

成为VIP会员查看完整内容
相关内容


相关VIP内容
相关资讯
相关论文
信息共享一直对军事行动至关重要。本文考虑了应包含哪些解释性内容以促进更好的决策。探讨了元不确定性的概念,这是在没有解释性内容的情况下产生的。论文使用两个场景来探讨省略解释的后果。在场景中,贝叶斯网络用于在不确定性下对推理进行建模。这些情景表明,元不确定性会对决策产生负面影响。提出了一种应对元不确定性的方法,即对共享信息的可能解释进行概率建模。
图1:军事环境中的信息共享典型场景